
LuMK AML2015
LuMK AML2015
You might also like
- Introduction to Finite Element Analysis: Formulation, Verification and ValidationFrom EverandIntroduction to Finite Element Analysis: Formulation, Verification and ValidationNo ratings yet
- Elearning in Aviation SuzanneDocument35 pagesElearning in Aviation SuzannejuanNo ratings yet
- 2016 Exponential Stability of Linear Discrete Systems With Constant Coefficients and Single DelayDocument6 pages2016 Exponential Stability of Linear Discrete Systems With Constant Coefficients and Single DelayAlejandro ChiuNo ratings yet
- ADM Vs Lyapunov Artificial Small Parameter MethodDocument3 pagesADM Vs Lyapunov Artificial Small Parameter MethodMuhammad Khalid HanifNo ratings yet
- Isogeometric Analysis On V-Reps: First Results: SciencedirectDocument27 pagesIsogeometric Analysis On V-Reps: First Results: SciencedirectJorge Luis Garcia ZuñigaNo ratings yet
- 39 Inverse Problems in EngineeringDocument1 page39 Inverse Problems in EngineeringMPD19I001 VITHISHA MNo ratings yet
- PDF Mathematics For Physicists Introductory Concepts and Methods Alexander Altland Ebook Full ChapterDocument53 pagesPDF Mathematics For Physicists Introductory Concepts and Methods Alexander Altland Ebook Full Chaptermichael.martin290100% (5)
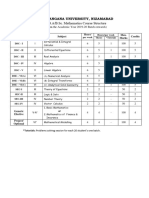
- Teaching Scheme and SyllabusDocument165 pagesTeaching Scheme and Syllabuscalich88No ratings yet
- Algebraic Approximations For Transcendental EquationsDocument18 pagesAlgebraic Approximations For Transcendental EquationschoupoNo ratings yet
- American International University-Bangladesh (AIUB) : Summer 2019-2020 SEMESTER I. Course Core and TitleDocument11 pagesAmerican International University-Bangladesh (AIUB) : Summer 2019-2020 SEMESTER I. Course Core and TitleRafeu RiyanNo ratings yet
- The Computation of Lie Point Symmetry Generators Modulational I - 2023 - ResultDocument11 pagesThe Computation of Lie Point Symmetry Generators Modulational I - 2023 - Resultronaldquezada038No ratings yet
- Cse & IseDocument19 pagesCse & IseRuthwik S GowdaNo ratings yet
- WB42 AllDocument28 pagesWB42 AllAhmed MohamedNo ratings yet
- WB29 AllDocument84 pagesWB29 Allrawhul setyokoNo ratings yet
- PIIS2405844020319514Document6 pagesPIIS2405844020319514subbareddNo ratings yet
- Navodaya Vidyalaya Samiti, NoidaDocument8 pagesNavodaya Vidyalaya Samiti, Noida9A RN10 Harmandeep SinghNo ratings yet
- Artificial Intelligence PaperDocument19 pagesArtificial Intelligence PaperHaritaNo ratings yet
- WB46 AllDocument42 pagesWB46 AllAhmed MohamedNo ratings yet
- PE VI-MEG347A-CFD Syllabus 2020Document5 pagesPE VI-MEG347A-CFD Syllabus 2020Vaibhav AnandNo ratings yet
- 2024-25 CBSE 12 Maths SyllabusDocument8 pages2024-25 CBSE 12 Maths SyllabusnextaskfreelancerNo ratings yet
- Gujarat Technological University: W.E.F. AY 2020-21Document3 pagesGujarat Technological University: W.E.F. AY 2020-21AADITYA SHAHNo ratings yet
- Bmat201l Complex-Variables-And-Linear-Algebra TH 1.0 65 Bmat201lDocument3 pagesBmat201l Complex-Variables-And-Linear-Algebra TH 1.0 65 Bmat201lKrijayNo ratings yet
- New Fractional Derivative With Non-Singular Kernel For Deriving Legendre Spectral Collocation MethodDocument9 pagesNew Fractional Derivative With Non-Singular Kernel For Deriving Legendre Spectral Collocation MethodHidden ModeNo ratings yet
- Textbook Problems and Solutions in Introductory and Advanced Matrix Calculus 2Nd Edition Willi Hans Steeb Ebook All Chapter PDFDocument53 pagesTextbook Problems and Solutions in Introductory and Advanced Matrix Calculus 2Nd Edition Willi Hans Steeb Ebook All Chapter PDFarthur.vigil564100% (9)
- Dwarkadas J. Sanghvi College of EngineeringDocument22 pagesDwarkadas J. Sanghvi College of EngineeringMjNo ratings yet
- Linear Differential Equations With Variable Coe Cients and Mittag-Le Er KernelsDocument7 pagesLinear Differential Equations With Variable Coe Cients and Mittag-Le Er KernelsAbdul AzizNo ratings yet
- UG First Year Syllabus 2023-24Document11 pagesUG First Year Syllabus 2023-24angadsingh.ai23No ratings yet
- CFDDocument2 pagesCFDSumit BhanushaliNo ratings yet
- A Hierarchical Approach To The A Posteriori Error Estimation of Isogeometric Kirchhoff Plates and Kirchhoff-Love ShellsDocument20 pagesA Hierarchical Approach To The A Posteriori Error Estimation of Isogeometric Kirchhoff Plates and Kirchhoff-Love ShellsJorge Luis Garcia ZuñigaNo ratings yet
- Solving Inverse Non-Linear Fractional deDocument10 pagesSolving Inverse Non-Linear Fractional deAtif AvdovićNo ratings yet
- 2 - Wolfram Mathematica Application To Determination of The Number of Solutions For Certain Nonlinear Boundary Value ProblemsDocument25 pages2 - Wolfram Mathematica Application To Determination of The Number of Solutions For Certain Nonlinear Boundary Value ProblemsStefanie CastilloNo ratings yet
- Artikel Girolamo CardanoDocument8 pagesArtikel Girolamo CardanoSiti Nut FaizahNo ratings yet
- Vector Calculus and Linear Algebra: Gujarat Technological UniversityDocument3 pagesVector Calculus and Linear Algebra: Gujarat Technological Universitygecg ICNo ratings yet
- Vector Calculus For EngineersDocument196 pagesVector Calculus For EngineersMiguel Enmanuel Moya Mínguez100% (1)
- Math Methods in App Sciences - 2023 - Kumar - Collocation Method With Lagrange Polynomials For Variable OrderDocument19 pagesMath Methods in App Sciences - 2023 - Kumar - Collocation Method With Lagrange Polynomials For Variable Orderrashmi.sharma.rs.mat18No ratings yet
- 10 1108 - HFF 05 2023 0265Document22 pages10 1108 - HFF 05 2023 0265rajat365No ratings yet
- Vector Calculus For Engineers PDFDocument196 pagesVector Calculus For Engineers PDFIshan VatsaNo ratings yet
- Vector Calculus For Engineers CourseraDocument196 pagesVector Calculus For Engineers Courserafake guyNo ratings yet
- Linear Algebra and Vector CalculusDocument3 pagesLinear Algebra and Vector CalculusRoki BullNo ratings yet
- 1 s2.0 S0377042717300730 MainDocument11 pages1 s2.0 S0377042717300730 MainJoão Marcus LimaNo ratings yet
- 1 s2.0 S0005109822006173 MainDocument12 pages1 s2.0 S0005109822006173 MaincarlosNo ratings yet
- First Year B.E Syllabus Book 2022-2023Document138 pagesFirst Year B.E Syllabus Book 2022-2023angadsingh.ai23No ratings yet
- 4-Sem EC 15EMAB208 (2023-24)Document28 pages4-Sem EC 15EMAB208 (2023-24)01fe21bec262No ratings yet
- 47mathamatics SyllabusDocument16 pages47mathamatics SyllabusHaa HeNo ratings yet
- Problems Using ScilabDocument28 pagesProblems Using Scilabdeepika snehiNo ratings yet
- Physics Letters B: Kieran Bull, Yang-Hui He, Vishnu Jejjala, Challenger MishraDocument8 pagesPhysics Letters B: Kieran Bull, Yang-Hui He, Vishnu Jejjala, Challenger MishraRohith P RNo ratings yet
- On Symbolic Approaches For Computing The Matrix PermanentDocument18 pagesOn Symbolic Approaches For Computing The Matrix PermanentGaston GBNo ratings yet
- The Construction of The Finite-Difference Method and ApplicationDocument7 pagesThe Construction of The Finite-Difference Method and Applicationmansurreka7No ratings yet
- 2067 Other 13465 2 10 20221116Document11 pages2067 Other 13465 2 10 20221116Tashfeen SandhuNo ratings yet
- Symmetry 15 02172Document15 pagesSymmetry 15 02172niyexahehcxsvkharkNo ratings yet
- 10.1515 - Phys 2019 0087Document11 pages10.1515 - Phys 2019 0087Nicolas LuhankoNo ratings yet
- (2+1) - Dimensional Extended Calogero-Bogoyavlenskii-Schiff Equation in Plasma PhysicsDocument5 pages(2+1) - Dimensional Extended Calogero-Bogoyavlenskii-Schiff Equation in Plasma PhysicsSajjad AliNo ratings yet
- 22MATC11Document5 pages22MATC11Akash GVNo ratings yet
- SchedulesDocument44 pagesSchedulesjtran23618No ratings yet
- WB09 AllDocument70 pagesWB09 AlljoyNo ratings yet
- Academic (1-Board of Studies) Section: If Ji DDocument43 pagesAcademic (1-Board of Studies) Section: If Ji DAnsari SufiyanNo ratings yet
- MAT1001 Calculus For Engineers - Syllabus-1Document4 pagesMAT1001 Calculus For Engineers - Syllabus-1soyamsidh dasNo ratings yet
- BeliefinCFD-2019 10 28Document55 pagesBeliefinCFD-2019 10 28jiexing ZhangNo ratings yet
- 1 s2.0 S0898122123004595 MainDocument12 pages1 s2.0 S0898122123004595 MainGheaa Banda tNo ratings yet
- Quantum Algorithms For Matrix Geometric Means: Nana Liu, Qisheng Wang, Mark M. Wilde, and Zhicheng ZhangDocument48 pagesQuantum Algorithms For Matrix Geometric Means: Nana Liu, Qisheng Wang, Mark M. Wilde, and Zhicheng Zhangtdtv0204No ratings yet
- The Calabi–Yau Landscape: From Geometry, to Physics, to Machine LearningFrom EverandThe Calabi–Yau Landscape: From Geometry, to Physics, to Machine LearningNo ratings yet
- Indian J Physics Modulation Stability Analysis and Solitary Wave Solutions of Nonlinear Higher-Order Schrödinger Dynamical Equation With Second-Order Spatiotemporal DispersionDocument9 pagesIndian J Physics Modulation Stability Analysis and Solitary Wave Solutions of Nonlinear Higher-Order Schrödinger Dynamical Equation With Second-Order Spatiotemporal DispersionMuhammad ArshadNo ratings yet
- Elliptic Function Soliton Solutions of The Higher-Order Nonlinear Dispersive Kundu-Eckhaus Dynamical Equation With Applications and StabilityDocument14 pagesElliptic Function Soliton Solutions of The Higher-Order Nonlinear Dispersive Kundu-Eckhaus Dynamical Equation With Applications and StabilityMuhammad ArshadNo ratings yet
- Novel Soliton Solutions of Two-Mode Sawada-Kotera Equation and Its ApplicationsDocument14 pagesNovel Soliton Solutions of Two-Mode Sawada-Kotera Equation and Its ApplicationsMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- Fractional Reduced Differential Transform MethodDocument10 pagesFractional Reduced Differential Transform MethodMuhammad Arshad100% (1)
- 48 1-S2.0-S1110016821000041-MainDocument10 pages48 1-S2.0-S1110016821000041-MainMuhammad ArshadNo ratings yet
- Abundant Solitary Wave Solutions For Space-Time Fractional Unstable Nonlinear Schrödinger EquationsDocument11 pagesAbundant Solitary Wave Solutions For Space-Time Fractional Unstable Nonlinear Schrödinger EquationsMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- Computers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueDocument8 pagesComputers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- The Perennial PhilosophyDocument14 pagesThe Perennial Philosophybrodie21100% (1)
- Collective SecurityDocument7 pagesCollective SecurityHarshit SinghNo ratings yet
- Beginning Practicecu EdocDocument128 pagesBeginning Practicecu Edocapi-236393707No ratings yet
- A Maqāma Collection by A Mamlūk Historian: Mu Ammad Al - Afadī (Fl. First Quarter of The 8th/14th C.)Document33 pagesA Maqāma Collection by A Mamlūk Historian: Mu Ammad Al - Afadī (Fl. First Quarter of The 8th/14th C.)mpomeranNo ratings yet
- DLL - Mapeh 5 - Q3 - W2 2023-2024Document7 pagesDLL - Mapeh 5 - Q3 - W2 2023-2024moshavila32509No ratings yet
- CompilationDocument54 pagesCompilationShiela BrownNo ratings yet
- Seminar Report On Ion PropulsionDocument6 pagesSeminar Report On Ion PropulsionMac TVNo ratings yet
- Cricket SepepDocument7 pagesCricket Sepepapi-308918232No ratings yet
- 2007 Justicia, Rebeca ECUADOR'S CHOCO ANDEAN CORRIDOR: A LANDSCAPE APPROACH FOR CONSERVATION AND SUSTAINABLE DEVELOPMENTDocument248 pages2007 Justicia, Rebeca ECUADOR'S CHOCO ANDEAN CORRIDOR: A LANDSCAPE APPROACH FOR CONSERVATION AND SUSTAINABLE DEVELOPMENTRebeca JusticiaNo ratings yet
- Debugger BlackfinDocument26 pagesDebugger Blackfincarver_uaNo ratings yet
- LysineDocument18 pagesLysineYob YnnosNo ratings yet
- MHRM 2016 PDFDocument16 pagesMHRM 2016 PDFבעילום שם משתמשNo ratings yet
- Unit 3 Module 1 The Menstrual CycleDocument20 pagesUnit 3 Module 1 The Menstrual CycleMARIANNE SORIANO100% (2)
- William - Shakespeare On The Double! Romeo and Juliet (Shakespeare On The Double!) (2006)Document243 pagesWilliam - Shakespeare On The Double! Romeo and Juliet (Shakespeare On The Double!) (2006)GogiGogos100% (1)
- Educ - MidtermDocument8 pagesEduc - MidtermAn Jannette AlmodielNo ratings yet
- Tamilnadu Siva (SCN) Temples ListDocument6 pagesTamilnadu Siva (SCN) Temples ListSoundararajan Seerangan50% (2)
- Actual and Potential Gifts: Critique, Shadow Gift Relations and The Virtual Domain of The UngivenDocument22 pagesActual and Potential Gifts: Critique, Shadow Gift Relations and The Virtual Domain of The Ungivenanaid_ortíz_5No ratings yet
- M.Sc. Nursing Syllabus and RegulationDocument145 pagesM.Sc. Nursing Syllabus and RegulationSanthosh.S.UNo ratings yet
- Metabolizam KreatininaDocument21 pagesMetabolizam KreatininahareNo ratings yet
- Ashley-Benoit My Resume IndeedDocument2 pagesAshley-Benoit My Resume Indeedapi-435844973No ratings yet
- Materi 3 Materi 3 Rerangka Konseptual IASBDocument20 pagesMateri 3 Materi 3 Rerangka Konseptual IASBgadi3szzNo ratings yet
- Agilent 54600B Oscilloscope Data SheetDocument8 pagesAgilent 54600B Oscilloscope Data SheetAlejandro CasasNo ratings yet
- AutodeskCertifiedUserAutoCADExamOverview PDFDocument5 pagesAutodeskCertifiedUserAutoCADExamOverview PDFAyman KandeelNo ratings yet
- Research Proposal G5Cheating Behavior in ExamR 03Document44 pagesResearch Proposal G5Cheating Behavior in ExamR 03Davidson BravoNo ratings yet
- Impact Test On Steel SampleDocument4 pagesImpact Test On Steel SampleAdil Javed Chaudhary100% (2)
- Khanqah of Sarwari Qadri OrderDocument74 pagesKhanqah of Sarwari Qadri OrderSultan ul Faqr PublicationsNo ratings yet
- Exams For Sea Fareres PDFDocument35 pagesExams For Sea Fareres PDFSamir Alshaar100% (2)
- GSL SP 1998 133 01 01Document18 pagesGSL SP 1998 133 01 01RAFIK BEN SALAHNo ratings yet
- The Cask of AmontilladoDocument43 pagesThe Cask of AmontilladoZechaina Udo100% (2)


































































































Download as pdf or txt
You might also like
- Introduction to Finite Element Analysis: Formulation, Verification and ValidationFrom EverandIntroduction to Finite Element Analysis: Formulation, Verification and ValidationNo ratings yet
- Elearning in Aviation SuzanneDocument35 pagesElearning in Aviation SuzannejuanNo ratings yet
- 2016 Exponential Stability of Linear Discrete Systems With Constant Coefficients and Single DelayDocument6 pages2016 Exponential Stability of Linear Discrete Systems With Constant Coefficients and Single DelayAlejandro ChiuNo ratings yet
- ADM Vs Lyapunov Artificial Small Parameter MethodDocument3 pagesADM Vs Lyapunov Artificial Small Parameter MethodMuhammad Khalid HanifNo ratings yet
- Isogeometric Analysis On V-Reps: First Results: SciencedirectDocument27 pagesIsogeometric Analysis On V-Reps: First Results: SciencedirectJorge Luis Garcia ZuñigaNo ratings yet
- 39 Inverse Problems in EngineeringDocument1 page39 Inverse Problems in EngineeringMPD19I001 VITHISHA MNo ratings yet
- PDF Mathematics For Physicists Introductory Concepts and Methods Alexander Altland Ebook Full ChapterDocument53 pagesPDF Mathematics For Physicists Introductory Concepts and Methods Alexander Altland Ebook Full Chaptermichael.martin290100% (5)
- Teaching Scheme and SyllabusDocument165 pagesTeaching Scheme and Syllabuscalich88No ratings yet
- Algebraic Approximations For Transcendental EquationsDocument18 pagesAlgebraic Approximations For Transcendental EquationschoupoNo ratings yet
- American International University-Bangladesh (AIUB) : Summer 2019-2020 SEMESTER I. Course Core and TitleDocument11 pagesAmerican International University-Bangladesh (AIUB) : Summer 2019-2020 SEMESTER I. Course Core and TitleRafeu RiyanNo ratings yet
- The Computation of Lie Point Symmetry Generators Modulational I - 2023 - ResultDocument11 pagesThe Computation of Lie Point Symmetry Generators Modulational I - 2023 - Resultronaldquezada038No ratings yet
- Cse & IseDocument19 pagesCse & IseRuthwik S GowdaNo ratings yet
- WB42 AllDocument28 pagesWB42 AllAhmed MohamedNo ratings yet
- WB29 AllDocument84 pagesWB29 Allrawhul setyokoNo ratings yet
- PIIS2405844020319514Document6 pagesPIIS2405844020319514subbareddNo ratings yet
- Navodaya Vidyalaya Samiti, NoidaDocument8 pagesNavodaya Vidyalaya Samiti, Noida9A RN10 Harmandeep SinghNo ratings yet
- Artificial Intelligence PaperDocument19 pagesArtificial Intelligence PaperHaritaNo ratings yet
- WB46 AllDocument42 pagesWB46 AllAhmed MohamedNo ratings yet
- PE VI-MEG347A-CFD Syllabus 2020Document5 pagesPE VI-MEG347A-CFD Syllabus 2020Vaibhav AnandNo ratings yet
- 2024-25 CBSE 12 Maths SyllabusDocument8 pages2024-25 CBSE 12 Maths SyllabusnextaskfreelancerNo ratings yet
- Gujarat Technological University: W.E.F. AY 2020-21Document3 pagesGujarat Technological University: W.E.F. AY 2020-21AADITYA SHAHNo ratings yet
- Bmat201l Complex-Variables-And-Linear-Algebra TH 1.0 65 Bmat201lDocument3 pagesBmat201l Complex-Variables-And-Linear-Algebra TH 1.0 65 Bmat201lKrijayNo ratings yet
- New Fractional Derivative With Non-Singular Kernel For Deriving Legendre Spectral Collocation MethodDocument9 pagesNew Fractional Derivative With Non-Singular Kernel For Deriving Legendre Spectral Collocation MethodHidden ModeNo ratings yet
- Textbook Problems and Solutions in Introductory and Advanced Matrix Calculus 2Nd Edition Willi Hans Steeb Ebook All Chapter PDFDocument53 pagesTextbook Problems and Solutions in Introductory and Advanced Matrix Calculus 2Nd Edition Willi Hans Steeb Ebook All Chapter PDFarthur.vigil564100% (9)
- Dwarkadas J. Sanghvi College of EngineeringDocument22 pagesDwarkadas J. Sanghvi College of EngineeringMjNo ratings yet
- Linear Differential Equations With Variable Coe Cients and Mittag-Le Er KernelsDocument7 pagesLinear Differential Equations With Variable Coe Cients and Mittag-Le Er KernelsAbdul AzizNo ratings yet
- UG First Year Syllabus 2023-24Document11 pagesUG First Year Syllabus 2023-24angadsingh.ai23No ratings yet
- CFDDocument2 pagesCFDSumit BhanushaliNo ratings yet
- A Hierarchical Approach To The A Posteriori Error Estimation of Isogeometric Kirchhoff Plates and Kirchhoff-Love ShellsDocument20 pagesA Hierarchical Approach To The A Posteriori Error Estimation of Isogeometric Kirchhoff Plates and Kirchhoff-Love ShellsJorge Luis Garcia ZuñigaNo ratings yet
- Solving Inverse Non-Linear Fractional deDocument10 pagesSolving Inverse Non-Linear Fractional deAtif AvdovićNo ratings yet
- 2 - Wolfram Mathematica Application To Determination of The Number of Solutions For Certain Nonlinear Boundary Value ProblemsDocument25 pages2 - Wolfram Mathematica Application To Determination of The Number of Solutions For Certain Nonlinear Boundary Value ProblemsStefanie CastilloNo ratings yet
- Artikel Girolamo CardanoDocument8 pagesArtikel Girolamo CardanoSiti Nut FaizahNo ratings yet
- Vector Calculus and Linear Algebra: Gujarat Technological UniversityDocument3 pagesVector Calculus and Linear Algebra: Gujarat Technological Universitygecg ICNo ratings yet
- Vector Calculus For EngineersDocument196 pagesVector Calculus For EngineersMiguel Enmanuel Moya Mínguez100% (1)
- Math Methods in App Sciences - 2023 - Kumar - Collocation Method With Lagrange Polynomials For Variable OrderDocument19 pagesMath Methods in App Sciences - 2023 - Kumar - Collocation Method With Lagrange Polynomials For Variable Orderrashmi.sharma.rs.mat18No ratings yet
- 10 1108 - HFF 05 2023 0265Document22 pages10 1108 - HFF 05 2023 0265rajat365No ratings yet
- Vector Calculus For Engineers PDFDocument196 pagesVector Calculus For Engineers PDFIshan VatsaNo ratings yet
- Vector Calculus For Engineers CourseraDocument196 pagesVector Calculus For Engineers Courserafake guyNo ratings yet
- Linear Algebra and Vector CalculusDocument3 pagesLinear Algebra and Vector CalculusRoki BullNo ratings yet
- 1 s2.0 S0377042717300730 MainDocument11 pages1 s2.0 S0377042717300730 MainJoão Marcus LimaNo ratings yet
- 1 s2.0 S0005109822006173 MainDocument12 pages1 s2.0 S0005109822006173 MaincarlosNo ratings yet
- First Year B.E Syllabus Book 2022-2023Document138 pagesFirst Year B.E Syllabus Book 2022-2023angadsingh.ai23No ratings yet
- 4-Sem EC 15EMAB208 (2023-24)Document28 pages4-Sem EC 15EMAB208 (2023-24)01fe21bec262No ratings yet
- 47mathamatics SyllabusDocument16 pages47mathamatics SyllabusHaa HeNo ratings yet
- Problems Using ScilabDocument28 pagesProblems Using Scilabdeepika snehiNo ratings yet
- Physics Letters B: Kieran Bull, Yang-Hui He, Vishnu Jejjala, Challenger MishraDocument8 pagesPhysics Letters B: Kieran Bull, Yang-Hui He, Vishnu Jejjala, Challenger MishraRohith P RNo ratings yet
- On Symbolic Approaches For Computing The Matrix PermanentDocument18 pagesOn Symbolic Approaches For Computing The Matrix PermanentGaston GBNo ratings yet
- The Construction of The Finite-Difference Method and ApplicationDocument7 pagesThe Construction of The Finite-Difference Method and Applicationmansurreka7No ratings yet
- 2067 Other 13465 2 10 20221116Document11 pages2067 Other 13465 2 10 20221116Tashfeen SandhuNo ratings yet
- Symmetry 15 02172Document15 pagesSymmetry 15 02172niyexahehcxsvkharkNo ratings yet
- 10.1515 - Phys 2019 0087Document11 pages10.1515 - Phys 2019 0087Nicolas LuhankoNo ratings yet
- (2+1) - Dimensional Extended Calogero-Bogoyavlenskii-Schiff Equation in Plasma PhysicsDocument5 pages(2+1) - Dimensional Extended Calogero-Bogoyavlenskii-Schiff Equation in Plasma PhysicsSajjad AliNo ratings yet
- 22MATC11Document5 pages22MATC11Akash GVNo ratings yet
- SchedulesDocument44 pagesSchedulesjtran23618No ratings yet
- WB09 AllDocument70 pagesWB09 AlljoyNo ratings yet
- Academic (1-Board of Studies) Section: If Ji DDocument43 pagesAcademic (1-Board of Studies) Section: If Ji DAnsari SufiyanNo ratings yet
- MAT1001 Calculus For Engineers - Syllabus-1Document4 pagesMAT1001 Calculus For Engineers - Syllabus-1soyamsidh dasNo ratings yet
- BeliefinCFD-2019 10 28Document55 pagesBeliefinCFD-2019 10 28jiexing ZhangNo ratings yet
- 1 s2.0 S0898122123004595 MainDocument12 pages1 s2.0 S0898122123004595 MainGheaa Banda tNo ratings yet
- Quantum Algorithms For Matrix Geometric Means: Nana Liu, Qisheng Wang, Mark M. Wilde, and Zhicheng ZhangDocument48 pagesQuantum Algorithms For Matrix Geometric Means: Nana Liu, Qisheng Wang, Mark M. Wilde, and Zhicheng Zhangtdtv0204No ratings yet
- The Calabi–Yau Landscape: From Geometry, to Physics, to Machine LearningFrom EverandThe Calabi–Yau Landscape: From Geometry, to Physics, to Machine LearningNo ratings yet
- Indian J Physics Modulation Stability Analysis and Solitary Wave Solutions of Nonlinear Higher-Order Schrödinger Dynamical Equation With Second-Order Spatiotemporal DispersionDocument9 pagesIndian J Physics Modulation Stability Analysis and Solitary Wave Solutions of Nonlinear Higher-Order Schrödinger Dynamical Equation With Second-Order Spatiotemporal DispersionMuhammad ArshadNo ratings yet
- Elliptic Function Soliton Solutions of The Higher-Order Nonlinear Dispersive Kundu-Eckhaus Dynamical Equation With Applications and StabilityDocument14 pagesElliptic Function Soliton Solutions of The Higher-Order Nonlinear Dispersive Kundu-Eckhaus Dynamical Equation With Applications and StabilityMuhammad ArshadNo ratings yet
- Novel Soliton Solutions of Two-Mode Sawada-Kotera Equation and Its ApplicationsDocument14 pagesNovel Soliton Solutions of Two-Mode Sawada-Kotera Equation and Its ApplicationsMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- Fractional Reduced Differential Transform MethodDocument10 pagesFractional Reduced Differential Transform MethodMuhammad Arshad100% (1)
- 48 1-S2.0-S1110016821000041-MainDocument10 pages48 1-S2.0-S1110016821000041-MainMuhammad ArshadNo ratings yet
- Abundant Solitary Wave Solutions For Space-Time Fractional Unstable Nonlinear Schrödinger EquationsDocument11 pagesAbundant Solitary Wave Solutions For Space-Time Fractional Unstable Nonlinear Schrödinger EquationsMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- Computers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueDocument8 pagesComputers and Mathematics With Applications: Xing Lü, Wen-Xiu Ma, Yuan Zhou, Chaudry Masood KhaliqueMuhammad ArshadNo ratings yet
- A Note On Rational Solutions To A Hirota-Satsuma-like EquationDocument6 pagesA Note On Rational Solutions To A Hirota-Satsuma-like EquationMuhammad ArshadNo ratings yet
- The Perennial PhilosophyDocument14 pagesThe Perennial Philosophybrodie21100% (1)
- Collective SecurityDocument7 pagesCollective SecurityHarshit SinghNo ratings yet
- Beginning Practicecu EdocDocument128 pagesBeginning Practicecu Edocapi-236393707No ratings yet
- A Maqāma Collection by A Mamlūk Historian: Mu Ammad Al - Afadī (Fl. First Quarter of The 8th/14th C.)Document33 pagesA Maqāma Collection by A Mamlūk Historian: Mu Ammad Al - Afadī (Fl. First Quarter of The 8th/14th C.)mpomeranNo ratings yet
- DLL - Mapeh 5 - Q3 - W2 2023-2024Document7 pagesDLL - Mapeh 5 - Q3 - W2 2023-2024moshavila32509No ratings yet
- CompilationDocument54 pagesCompilationShiela BrownNo ratings yet
- Seminar Report On Ion PropulsionDocument6 pagesSeminar Report On Ion PropulsionMac TVNo ratings yet
- Cricket SepepDocument7 pagesCricket Sepepapi-308918232No ratings yet
- 2007 Justicia, Rebeca ECUADOR'S CHOCO ANDEAN CORRIDOR: A LANDSCAPE APPROACH FOR CONSERVATION AND SUSTAINABLE DEVELOPMENTDocument248 pages2007 Justicia, Rebeca ECUADOR'S CHOCO ANDEAN CORRIDOR: A LANDSCAPE APPROACH FOR CONSERVATION AND SUSTAINABLE DEVELOPMENTRebeca JusticiaNo ratings yet
- Debugger BlackfinDocument26 pagesDebugger Blackfincarver_uaNo ratings yet
- LysineDocument18 pagesLysineYob YnnosNo ratings yet
- MHRM 2016 PDFDocument16 pagesMHRM 2016 PDFבעילום שם משתמשNo ratings yet
- Unit 3 Module 1 The Menstrual CycleDocument20 pagesUnit 3 Module 1 The Menstrual CycleMARIANNE SORIANO100% (2)
- William - Shakespeare On The Double! Romeo and Juliet (Shakespeare On The Double!) (2006)Document243 pagesWilliam - Shakespeare On The Double! Romeo and Juliet (Shakespeare On The Double!) (2006)GogiGogos100% (1)
- Educ - MidtermDocument8 pagesEduc - MidtermAn Jannette AlmodielNo ratings yet
- Tamilnadu Siva (SCN) Temples ListDocument6 pagesTamilnadu Siva (SCN) Temples ListSoundararajan Seerangan50% (2)
- Actual and Potential Gifts: Critique, Shadow Gift Relations and The Virtual Domain of The UngivenDocument22 pagesActual and Potential Gifts: Critique, Shadow Gift Relations and The Virtual Domain of The Ungivenanaid_ortíz_5No ratings yet
- M.Sc. Nursing Syllabus and RegulationDocument145 pagesM.Sc. Nursing Syllabus and RegulationSanthosh.S.UNo ratings yet
- Metabolizam KreatininaDocument21 pagesMetabolizam KreatininahareNo ratings yet
- Ashley-Benoit My Resume IndeedDocument2 pagesAshley-Benoit My Resume Indeedapi-435844973No ratings yet
- Materi 3 Materi 3 Rerangka Konseptual IASBDocument20 pagesMateri 3 Materi 3 Rerangka Konseptual IASBgadi3szzNo ratings yet
- Agilent 54600B Oscilloscope Data SheetDocument8 pagesAgilent 54600B Oscilloscope Data SheetAlejandro CasasNo ratings yet
- AutodeskCertifiedUserAutoCADExamOverview PDFDocument5 pagesAutodeskCertifiedUserAutoCADExamOverview PDFAyman KandeelNo ratings yet
- Research Proposal G5Cheating Behavior in ExamR 03Document44 pagesResearch Proposal G5Cheating Behavior in ExamR 03Davidson BravoNo ratings yet
- Impact Test On Steel SampleDocument4 pagesImpact Test On Steel SampleAdil Javed Chaudhary100% (2)
- Khanqah of Sarwari Qadri OrderDocument74 pagesKhanqah of Sarwari Qadri OrderSultan ul Faqr PublicationsNo ratings yet
- Exams For Sea Fareres PDFDocument35 pagesExams For Sea Fareres PDFSamir Alshaar100% (2)
- GSL SP 1998 133 01 01Document18 pagesGSL SP 1998 133 01 01RAFIK BEN SALAHNo ratings yet
- The Cask of AmontilladoDocument43 pagesThe Cask of AmontilladoZechaina Udo100% (2)