Download as pdf or txt
You might also like
- Integral CalculusDocument120 pagesIntegral CalculusBernadette Boncolmo100% (3)
- Section 4 Integral Equations: Neumann SeriesDocument7 pagesSection 4 Integral Equations: Neumann SeriesfdalfNo ratings yet
- T DistributionDocument4 pagesT DistributionEr Rajesh BuraNo ratings yet
- SM CH PDFDocument14 pagesSM CH PDFHector NaranjoNo ratings yet
- PBI Springer Product Market Codes 1301Document11 pagesPBI Springer Product Market Codes 1301abhinandNo ratings yet
- Analytical Solution For The Time-Fractional Telegraph EquationDocument14 pagesAnalytical Solution For The Time-Fractional Telegraph EquationhabibNo ratings yet
- Variable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationDocument6 pagesVariable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationLymesNo ratings yet
- Simple Quadrature For Singular Integral Equations With Variable Coe CientsDocument20 pagesSimple Quadrature For Singular Integral Equations With Variable Coe CientsGloomsyNo ratings yet
- JMM Volume 7 Issue 2 Pages 231-250Document20 pagesJMM Volume 7 Issue 2 Pages 231-250milahnur sitiNo ratings yet
- A New Polynomial Method For Solving Fredholm - Volterra Integral EquationsDocument10 pagesA New Polynomial Method For Solving Fredholm - Volterra Integral EquationsJulee ShahniNo ratings yet
- Lecture Notes On Fundamentals of Vector SpacesDocument30 pagesLecture Notes On Fundamentals of Vector SpaceschandrahasNo ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2012, 1-8Document8 pagesInternational Journal of Pure and Applied Mathematics No. 1 2012, 1-8Talha WaheedNo ratings yet
- MAS 201 Spring 2021 (CD) Differential Equations and ApplicationsDocument23 pagesMAS 201 Spring 2021 (CD) Differential Equations and ApplicationsBlue horseNo ratings yet
- Numerical Solution of Volterra-Fredholm IntegralDocument16 pagesNumerical Solution of Volterra-Fredholm Integralneda gossiliNo ratings yet
- Sampling of Vector-Valued Transforms Associated With Green's Matrix of Dirac SystemsDocument14 pagesSampling of Vector-Valued Transforms Associated With Green's Matrix of Dirac SystemsLuis FuentesNo ratings yet
- Gradient DescendentDocument10 pagesGradient Descendentsilvia.gomez95No ratings yet
- Accelerated Numerical Method For Singularly Perturbed Differential Difference EquationsDocument6 pagesAccelerated Numerical Method For Singularly Perturbed Differential Difference EquationsSultan GodanaNo ratings yet
- Nonlinear Analysis Forum 19, Pp. 247-251, 2014Document6 pagesNonlinear Analysis Forum 19, Pp. 247-251, 2014Maher Ali NawkhassNo ratings yet
- Yogesh Meena (BCA-M15 4th SEM) CONM CCEDocument10 pagesYogesh Meena (BCA-M15 4th SEM) CONM CCEYogesh MeenaNo ratings yet
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
- Lecture Notes: Metric Spaces - Sergey MozgovoyDocument41 pagesLecture Notes: Metric Spaces - Sergey MozgovoyNúñezNo ratings yet
- Coding Theory Linear Cyclic Codes: 0 1 N 1 N 1 N NDocument19 pagesCoding Theory Linear Cyclic Codes: 0 1 N 1 N 1 N NvijaykannamallaNo ratings yet
- Numerical Methods For Second Order Differential EquationDocument15 pagesNumerical Methods For Second Order Differential Equationfarshan296015No ratings yet
- MATH21Document11 pagesMATH21NilushaNo ratings yet
- All Lectures Math3Document61 pagesAll Lectures Math3abbasovn2005No ratings yet
- On The Stability of A Mixed Cubic and QuDocument10 pagesOn The Stability of A Mixed Cubic and QuNikos MantzakourasNo ratings yet
- Lecture 5Document26 pagesLecture 5Nanditha ANo ratings yet
- Lienard EquationDocument9 pagesLienard Equationadedokunphoebe48No ratings yet
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationMich LadycanNo ratings yet
- 1 D Greens FunctionsDocument4 pages1 D Greens Functionsss_nainamohammedNo ratings yet
- Linear Differential Equation J&I PDFDocument77 pagesLinear Differential Equation J&I PDFscribdrayanNo ratings yet
- 1013 1877 1 SMDocument7 pages1013 1877 1 SMAgus Hendri WahyudiNo ratings yet
- Karesh CEJM 5 (4) 2007Document10 pagesKaresh CEJM 5 (4) 2007ErkinjonNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- Systems of Equations: DiscussionDocument6 pagesSystems of Equations: DiscussionJirayus JinapongNo ratings yet
- On The Solution of Mathematical Programming Problems With Equilibrium ConstraintsDocument18 pagesOn The Solution of Mathematical Programming Problems With Equilibrium ConstraintsxjohannNo ratings yet
- MATH2015-6A-M-Exact Differential EquationDocument13 pagesMATH2015-6A-M-Exact Differential EquationAli AliNo ratings yet
- 5 Calculus VariationDocument13 pages5 Calculus VariationTan Jia En FeliciaNo ratings yet
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- Ordinary Differential Equations (Odes) : Department of Mathematics Iit Guwahati Ra/Rks/Mgpp/KvkDocument16 pagesOrdinary Differential Equations (Odes) : Department of Mathematics Iit Guwahati Ra/Rks/Mgpp/KvkNeil MathersNo ratings yet
- Stability and Convergence of The Wavelet-Galerkin ...Document19 pagesStability and Convergence of The Wavelet-Galerkin ...Luu KhoaNo ratings yet
- mb135 4 5Document10 pagesmb135 4 5edo hangukoNo ratings yet
- Calculus 1: FunctionsDocument2 pagesCalculus 1: FunctionsAlie Lee GeolagaNo ratings yet
- Ps 13 SolDocument12 pagesPs 13 SolAngelo OppioNo ratings yet
- Solution of Transonic Gas Equation by Using Symmetry GroupsDocument7 pagesSolution of Transonic Gas Equation by Using Symmetry GroupsRakeshconclaveNo ratings yet
- Generalized Continuation Newton Methods and The Trust-Region Updating Strategy For The Underdetermined SystemDocument23 pagesGeneralized Continuation Newton Methods and The Trust-Region Updating Strategy For The Underdetermined System郭妙恬No ratings yet
- 2022 PAWSSrinivasan Notes 1Document10 pages2022 PAWSSrinivasan Notes 1SantiagoPinedaMontoyaNo ratings yet
- EEC 126 Discussion 4 SolutionsDocument4 pagesEEC 126 Discussion 4 SolutionsHoward100% (1)
- KorovkinDocument10 pagesKorovkinMurali KNo ratings yet
- Solutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James ParkinsonDocument9 pagesSolutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James ParkinsonTOM DAVISNo ratings yet
- Primal-Dual Interior Point Method ReportDocument8 pagesPrimal-Dual Interior Point Method ReportjayroldparcedeNo ratings yet
- Applied Mathematics and Computation: Alper Korkmaz, Idris Da GDocument12 pagesApplied Mathematics and Computation: Alper Korkmaz, Idris Da GLaila FouadNo ratings yet
- 10.1007@s11785 019 00924 ZDocument19 pages10.1007@s11785 019 00924 ZKarwan JwamerNo ratings yet
- On A Singular Perturbation Problem With Two Second-Order Turning PointsDocument17 pagesOn A Singular Perturbation Problem With Two Second-Order Turning Pointsเคียว โก๊ะNo ratings yet
- 2016.proceedings Cmmse 2Document4 pages2016.proceedings Cmmse 2JE Macias-DiazNo ratings yet
- Variance of A Random VariableDocument7 pagesVariance of A Random VariableMarvin TomasNo ratings yet
- AdditionalExercises 2Document5 pagesAdditionalExercises 2tqlittonNo ratings yet
- 890-Article Text-1870-1-10-20180406Document15 pages890-Article Text-1870-1-10-20180406Sheldon CooperNo ratings yet
- MA2213 SummaryDocument2 pagesMA2213 SummaryKhor Shi-JieNo ratings yet
- Week 3Document20 pagesWeek 3Venkat KarthikeyaNo ratings yet
- Global Solutions of MKDV With Critcal Initial DataDocument26 pagesGlobal Solutions of MKDV With Critcal Initial DataKamil DunstNo ratings yet
- Real Analysis ProjectDocument14 pagesReal Analysis ProjectAnonymous bpmgNpv50% (2)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
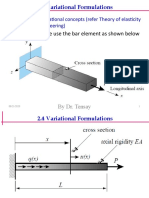
- 2.4 Variational Formulations: - For Illustration, We Use The Bar Element As Shown BelowDocument31 pages2.4 Variational Formulations: - For Illustration, We Use The Bar Element As Shown BelowAwashNo ratings yet
- Log & ModulusDocument2 pagesLog & Moduluschappidi neelakanta reddyNo ratings yet
- Laplace Transform ExamplesDocument19 pagesLaplace Transform Exampleshamza abdo mohamoudNo ratings yet
- Mathematics: Factors of PolynomialsDocument19 pagesMathematics: Factors of PolynomialsPaolo AimanNo ratings yet
- Consider The Bases B (U1, U2, U3) and B' (U'1, U'2, U'3) - QuizletDocument8 pagesConsider The Bases B (U1, U2, U3) and B' (U'1, U'2, U'3) - QuizletDiki OgreNo ratings yet
- Dokumen - Pub Ordinary Differential Equations Basics and Beyond 1st Ed 1493963872 978-1-4939 6387 4 978Document565 pagesDokumen - Pub Ordinary Differential Equations Basics and Beyond 1st Ed 1493963872 978-1-4939 6387 4 978Eduardo Benítez100% (1)
- Differential GeometryDocument9 pagesDifferential GeometrySaba AsgharNo ratings yet
- Week3 (June)Document8 pagesWeek3 (June)Amilou Aganan NepomucenoNo ratings yet
- Liu, R. Y. (1995) - Control Charts For Multivariate Processes.Document9 pagesLiu, R. Y. (1995) - Control Charts For Multivariate Processes.Judith LugoNo ratings yet
- Class Zone - Trigonometric Reference AnglesDocument7 pagesClass Zone - Trigonometric Reference AnglesDjemi SiswantoNo ratings yet
- 3D TransformationsDocument11 pages3D TransformationsMichelle SmithNo ratings yet
- The Slow Motion of A Sphere Through A Viscous Fluid Towards A Plane SurfaceDocument10 pagesThe Slow Motion of A Sphere Through A Viscous Fluid Towards A Plane SurfaceOscar A. LuévanoNo ratings yet
- Top Ten Summation Formulas: N N N K KDocument2 pagesTop Ten Summation Formulas: N N N K KMike WaniNo ratings yet
- First Order Linear Differential EquationsDocument27 pagesFirst Order Linear Differential EquationsOlsen SoqueñaNo ratings yet
- Dirac Delta FunctionDocument3 pagesDirac Delta FunctionrehanNo ratings yet
- Velocity in MechanismDocument37 pagesVelocity in Mechanismjawadullah100% (1)
- Three Step RuleDocument23 pagesThree Step RuleMariane CarandangNo ratings yet
- Math GRE Diagnostic TestDocument4 pagesMath GRE Diagnostic TestArvind SrinivasanNo ratings yet
- SAP BasicsDocument100 pagesSAP Basicsatilay29No ratings yet
- MDB3053 Chap9 LinearAlgebra Part 1 May16Document27 pagesMDB3053 Chap9 LinearAlgebra Part 1 May16Vikneshwaran BalakrishnanNo ratings yet
- Finals Pre CalculusDocument29 pagesFinals Pre CalculusAGUILAR MICHAEL ANDREI D.No ratings yet
- WINSEM2020-21 MAT1014 TH VL2020210505929 Reference Material I 08-Apr-2021 1-Group Homomorphism Isomorphism and Related ExamplesDocument27 pagesWINSEM2020-21 MAT1014 TH VL2020210505929 Reference Material I 08-Apr-2021 1-Group Homomorphism Isomorphism and Related ExamplesMoulik AroraNo ratings yet
- LarCalcETF7e 01 04calculusDocument45 pagesLarCalcETF7e 01 04calculusDerviş Hasan SubaşıNo ratings yet
- UP CIRCUIT Academic Affairs Division: 1. Lim 2. Lim 3. Lim ( ) 4. Lim LimDocument1 pageUP CIRCUIT Academic Affairs Division: 1. Lim 2. Lim 3. Lim ( ) 4. Lim LimJan Adrian Galang FranciscoNo ratings yet
- 100 AlgebraDocument75 pages100 AlgebrajaisuradityaNo ratings yet
- Module 6 (Maths)Document100 pagesModule 6 (Maths)Adabala Durgarao NaiduNo ratings yet
- N1 - Classification of Differential EquationDocument5 pagesN1 - Classification of Differential EquationMuizz ZainolNo ratings yet