Download as pdf or txt
You might also like
- Roots-Numerical Methods-Part 2Document18 pagesRoots-Numerical Methods-Part 2Mohamed OsamaNo ratings yet
- Matlab Introduction-Numerical MethodsDocument6 pagesMatlab Introduction-Numerical MethodsMohamed OsamaNo ratings yet
- Introduction-Numerical MethodsDocument24 pagesIntroduction-Numerical MethodsMohamed OsamaNo ratings yet
- Scheme of Study and Syllabus M. Tech (Machinedesign) 1styear: Semester: - IDocument31 pagesScheme of Study and Syllabus M. Tech (Machinedesign) 1styear: Semester: - IAshutosh SharmaNo ratings yet
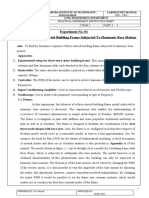
- Experiment 1Document15 pagesExperiment 1Kushal DesardaNo ratings yet
- Jawaharlal Nehru Technological University Anantapur Course Structure For Mechanical Engineering B. Tech Course (2015-16)Document17 pagesJawaharlal Nehru Technological University Anantapur Course Structure For Mechanical Engineering B. Tech Course (2015-16)Shamshir HussainNo ratings yet
- Part Two: Roots of EquationsDocument5 pagesPart Two: Roots of Equationsrodi10No ratings yet
- Fluids 3 ProjectDocument1 pageFluids 3 ProjectgavinoustonNo ratings yet
- RomoDocument18 pagesRomoalexanderhcNo ratings yet
- Cad Makeup PaperDocument2 pagesCad Makeup PaperMihir RathodNo ratings yet
- Lecture Note - Lecture 4Document75 pagesLecture Note - Lecture 4Muhd AmmarNo ratings yet
- Part Six: Numerical Differentiation and IntegrationDocument7 pagesPart Six: Numerical Differentiation and Integrationrodi10No ratings yet
- IIB TechISemR07RegularDocument4 pagesIIB TechISemR07RegularGopipavanNo ratings yet
- Lithography or Lithography Process Engineer or Electron Beam LitDocument3 pagesLithography or Lithography Process Engineer or Electron Beam Litapi-121369385No ratings yet
- MCM I Apr2016Document1 pageMCM I Apr2016rajNo ratings yet
- Cad-Cam (Mme 3103) RcsDocument2 pagesCad-Cam (Mme 3103) RcsMihir RathodNo ratings yet
- Computational Multiscale Mechanics Laboratory (CMML) : Meshfree Particle Methods (Macro-Scale 1m)Document5 pagesComputational Multiscale Mechanics Laboratory (CMML) : Meshfree Particle Methods (Macro-Scale 1m)kei HoinaNo ratings yet
- Lab Practice (Seat No 11505)Document54 pagesLab Practice (Seat No 11505)uday chavanNo ratings yet
- Presentation 1Document16 pagesPresentation 1MD.REDWNE-UL HoqueNo ratings yet
- University Instituteof Engineering Bachelor of Engineering (Computer Science & Engineering) Computer Graphics (Cst-305)Document17 pagesUniversity Instituteof Engineering Bachelor of Engineering (Computer Science & Engineering) Computer Graphics (Cst-305)adamNo ratings yet
- Recent Advances and Emerging Applications of The Boundary Element MethodDocument38 pagesRecent Advances and Emerging Applications of The Boundary Element MethodFilipe CoutinhoNo ratings yet
- Modeling and Simulation of Physical System: MekatronikaDocument18 pagesModeling and Simulation of Physical System: MekatronikaDani HerlianaNo ratings yet
- Modeling and Simulation of Physical System: MekatronikaDocument18 pagesModeling and Simulation of Physical System: MekatronikaDani HerlianaNo ratings yet
- Review of Theft DetectionDocument51 pagesReview of Theft DetectionSampath KumarNo ratings yet
- Bisection Digvijay DheerajDocument12 pagesBisection Digvijay DheerajEr Digvijay SinghNo ratings yet
- MD - Al - Imran Roton University of Dhaka BangladeshDocument25 pagesMD - Al - Imran Roton University of Dhaka BangladeshNishal CalebNo ratings yet
- Chevaugeon 2008Document2 pagesChevaugeon 2008nicolas ChevaugeonNo ratings yet
- Overview of Application of Matrices in Engineering ScienceDocument3 pagesOverview of Application of Matrices in Engineering SciencejuanNo ratings yet
- ESE Time Table June 2023 SY UG Even Sem AY 2022-2023Document1 pageESE Time Table June 2023 SY UG Even Sem AY 2022-2023BaliKa BakraNo ratings yet
- HIET - MV - FE - SummerDocument2 pagesHIET - MV - FE - Summerlovely_mhmdNo ratings yet
- EE Syllabus PDFDocument100 pagesEE Syllabus PDFShahid LoneNo ratings yet
- 2010 MS Thesis PDFDocument71 pages2010 MS Thesis PDFAntoineNo ratings yet
- The Riemannian Geometry of The Space ofDocument17 pagesThe Riemannian Geometry of The Space oftdtv0204No ratings yet
- CSE SyllabusDocument88 pagesCSE SyllabusAkshatNo ratings yet
- Inverse Method For Identification of Material Parameters Directly From Milling ExperimentsDocument5 pagesInverse Method For Identification of Material Parameters Directly From Milling Experimentsansys fluentNo ratings yet
- M. Tech. CAD-CAMDocument31 pagesM. Tech. CAD-CAMHarshalNo ratings yet
- Ii Year I Sem. R07Document4 pagesIi Year I Sem. R07Smasher RamNo ratings yet
- Amit Godbole: M.Tech. - IIT Kharagpur)Document2 pagesAmit Godbole: M.Tech. - IIT Kharagpur)satbirsingh123No ratings yet
- Iib Techisemester07Document3 pagesIib Techisemester07rassidNo ratings yet
- B.T. Kumaon Institute of Technology, Dwarahat (Almora)Document1 pageB.T. Kumaon Institute of Technology, Dwarahat (Almora)anil gaurNo ratings yet
- Istanbul Technical University Department of Mechanical Engineering Mta-551E Data Acquisition and Signal ProcessingDocument1 pageIstanbul Technical University Department of Mechanical Engineering Mta-551E Data Acquisition and Signal ProcessingVeysel KabaNo ratings yet
- Course Structure: For UG - R20 B. TechDocument38 pagesCourse Structure: For UG - R20 B. TechNarasimha Murty JammalamadakaNo ratings yet
- Jntuk 22 - BT - m2 TT 2017Document3 pagesJntuk 22 - BT - m2 TT 2017Srikanth ReddyNo ratings yet
- ECE Syllabus PDFDocument88 pagesECE Syllabus PDFEr Kamaljit SinghNo ratings yet
- K. J. Somaiya College of Engineering: Knapsack ProblemDocument6 pagesK. J. Somaiya College of Engineering: Knapsack ProblemSaraunsh JadhavNo ratings yet
- 2-D Semi-Analytical Magnetic Field Calculation For Flat Permanent-Magnet Linear Machines Using Exact Subdomain TechniqueDocument11 pages2-D Semi-Analytical Magnetic Field Calculation For Flat Permanent-Magnet Linear Machines Using Exact Subdomain TechniquejohnohNo ratings yet
- Advanced Signal Processing Techniques For Wireless CommunicationsDocument43 pagesAdvanced Signal Processing Techniques For Wireless CommunicationsShobha ShakyaNo ratings yet
- Practice Problems For Finite Element MethodDocument5 pagesPractice Problems For Finite Element Methodtheultimateentity433No ratings yet
- Hand Gesture Recognition For Human-Computer Interaction: Journal of Computer Science January 2010Document7 pagesHand Gesture Recognition For Human-Computer Interaction: Journal of Computer Science January 2010Abhi SigdelNo ratings yet
- Skin Effect Analysis in A Free Space Conductor: January 2010Document10 pagesSkin Effect Analysis in A Free Space Conductor: January 2010Syed Waqar Ul HaqNo ratings yet
- Forward KinematicsDocument19 pagesForward KinematicsADITYA BAKSHINo ratings yet
- DPelz IMS2002 WS NBDocument32 pagesDPelz IMS2002 WS NBHüseyin Nuri GülmezNo ratings yet
- Department of EXTC Engineering Problem Based Learning Experiment No 10Document6 pagesDepartment of EXTC Engineering Problem Based Learning Experiment No 10Pratik BhalakeNo ratings yet
- Department of EXTC Engineering Problem Based Learning Experiment No 10Document6 pagesDepartment of EXTC Engineering Problem Based Learning Experiment No 10Pratik BhalakeNo ratings yet
- III YEAR II SEM Jan 8th 2010 Supplies Time TableDocument5 pagesIII YEAR II SEM Jan 8th 2010 Supplies Time TablespiharshNo ratings yet
- Graphical Linkage Synthesis: Union College Mechanical Engineering MER 312: Dynamics and Kinematics (Of Mechanisms) / ATDocument23 pagesGraphical Linkage Synthesis: Union College Mechanical Engineering MER 312: Dynamics and Kinematics (Of Mechanisms) / ATManoah StephenNo ratings yet
- DAA Mini ProjectDocument15 pagesDAA Mini ProjectAjinkya SomawanshiNo ratings yet
- Finite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaFrom EverandFinite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaNo ratings yet
- Thermodynamics by Eastop Amp Mcconkey Solution Chapter 4 CompressDocument24 pagesThermodynamics by Eastop Amp Mcconkey Solution Chapter 4 CompressMohamed OsamaNo ratings yet
- Advanced Electronic Circuits: Dr. Khaled SakkouryDocument27 pagesAdvanced Electronic Circuits: Dr. Khaled SakkouryMohamed OsamaNo ratings yet
- Matlab Introduction-Numerical MethodsDocument6 pagesMatlab Introduction-Numerical MethodsMohamed OsamaNo ratings yet
- Introduction-Numerical MethodsDocument24 pagesIntroduction-Numerical MethodsMohamed OsamaNo ratings yet
- Roots-Numerical Methods-Part 2Document18 pagesRoots-Numerical Methods-Part 2Mohamed OsamaNo ratings yet
- HW8 SolutionDocument12 pagesHW8 SolutionMohamed OsamaNo ratings yet
- Solucionario CalculoDocument7 pagesSolucionario CalculoHee SookNo ratings yet
- Me N Mine Mathematics PDFDocument186 pagesMe N Mine Mathematics PDFVilva VivithaNo ratings yet
- Trigonometric Identities & Equations - SolutionsDocument4 pagesTrigonometric Identities & Equations - SolutionswolfretonmathsNo ratings yet
- Holy Trinity University: (Grade 9 - Charity)Document3 pagesHoly Trinity University: (Grade 9 - Charity)COM2017 HTUNo ratings yet
- Multiplication - WikipediaDocument22 pagesMultiplication - WikipediaResearch factNo ratings yet
- Maths Past PaperDocument23 pagesMaths Past PaperAvehiNo ratings yet
- A Theory For Multiresolution Signal Decomposition: The Wavelet RepresentationDocument20 pagesA Theory For Multiresolution Signal Decomposition: The Wavelet RepresentationAnonymous 1Yc9wYDtNo ratings yet
- HW9 Solution To RoydenDocument5 pagesHW9 Solution To RoydenChase Harrow50% (2)
- X y X y : ECO 305 - FALL 2003 - September 25Document6 pagesX y X y : ECO 305 - FALL 2003 - September 25irushadNo ratings yet
- Class 7 Math NCERT Chapter 1 SolutionDocument32 pagesClass 7 Math NCERT Chapter 1 SolutionKunal kumarNo ratings yet
- Discrete Mathematics: WwlchenDocument5 pagesDiscrete Mathematics: Wwlchenioan dumitrescuNo ratings yet
- Maths Mania # 067: DIRECTIONS: Refer To The Data Below and Answer The Questions That FollowDocument3 pagesMaths Mania # 067: DIRECTIONS: Refer To The Data Below and Answer The Questions That FollowTUSHAR JALANNo ratings yet
- 9212089Document75 pages9212089Luis VicenteNo ratings yet
- Non-Positional Number SystemDocument6 pagesNon-Positional Number SystemhellorosyNo ratings yet
- Sine and Cosine Graphs and Law of Sines Using SpaghettiDocument9 pagesSine and Cosine Graphs and Law of Sines Using Spaghettiapi-168512039No ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13Document15 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13mahesh dNo ratings yet
- Bermant A Course of Mathematical Analysis 2Document388 pagesBermant A Course of Mathematical Analysis 2Dzsoki Júing100% (1)
- DifferentiAbility of Several VariablesDocument11 pagesDifferentiAbility of Several VariablesnitishkhebbarNo ratings yet
- Iit Jee 2005 MatDocument7 pagesIit Jee 2005 MatLokesh KumarNo ratings yet
- Midterm ExaminationDocument18 pagesMidterm ExaminationambulafiaNo ratings yet
- SAM3001 CFD End Sem Question MO 2020Document1 pageSAM3001 CFD End Sem Question MO 2020Ashok PriyadarshiNo ratings yet
- Cs 8343 Stability Concept AnalysisDocument59 pagesCs 8343 Stability Concept AnalysisCrescent MnyamaNo ratings yet
- 15 - Published PapersDocument11 pages15 - Published PapersMehwish QadirNo ratings yet
- MA19455 SyllabusDocument1 pageMA19455 SyllabusmonaNo ratings yet
- Scope of Singapore Math PDFDocument16 pagesScope of Singapore Math PDFSudip799No ratings yet
- Soft Foot CorrectionDocument1 pageSoft Foot CorrectionJaime Berry100% (2)
- G10. Lesson PlanDocument3 pagesG10. Lesson PlanMaria Martina Delos Santos100% (1)
- Digital Image Processing - S. Jayaraman, S. Esakkirajan and T. VeerakumarDocument112 pagesDigital Image Processing - S. Jayaraman, S. Esakkirajan and T. VeerakumarPurushotham Prasad K57% (21)
- Promo08 CJC H2 (Soln)Document2 pagesPromo08 CJC H2 (Soln)toh tim lamNo ratings yet
- Poles Zeros and System Response Extra Notes Nise 1Document5 pagesPoles Zeros and System Response Extra Notes Nise 1Ian UdhiliNo ratings yet