
Truss Analysis: The Stiffness Method
Truss Analysis: The Stiffness Method
You might also like
- Physics 481: Condensed Matter Physics - Homework 10Document2 pagesPhysics 481: Condensed Matter Physics - Homework 10Mike GarciaNo ratings yet
- Solutions Manual For Satellite Communications Second Edition Timothy Pratt Charles Bostian Jeremy AllnuttDocument201 pagesSolutions Manual For Satellite Communications Second Edition Timothy Pratt Charles Bostian Jeremy Allnuttmaurinkrsitel0571% (7)
- Principal Hypotheses and Assumptions in Strength of MaterialsDocument9 pagesPrincipal Hypotheses and Assumptions in Strength of MaterialsJason Ross100% (1)
- Ara Axapta500.edbDocument3,858 pagesAra Axapta500.edbAhmed Badawy0% (1)
- Truss StiffnessDocument9 pagesTruss StiffnessWyaette NhengoNo ratings yet
- MIT6 641s09 Sol Exam2008Document9 pagesMIT6 641s09 Sol Exam2008Omwami LenoxNo ratings yet
- Kronig PenneyDocument5 pagesKronig PenneyFurkan KozanNo ratings yet
- Vibration of A Free Free Beam Under TensDocument10 pagesVibration of A Free Free Beam Under Tensjean.vasco94No ratings yet
- Wave Guides - Derivation of The Wave EquationDocument3 pagesWave Guides - Derivation of The Wave EquationManoj KhatriNo ratings yet
- PDFDocument7 pagesPDFSanthosh KumarNo ratings yet
- Assignment4 SolutionsDocument5 pagesAssignment4 SolutionsRyan ArcherNo ratings yet
- 6 Band Theory of SolidsDocument38 pages6 Band Theory of SolidsRavi Teja100% (2)
- Concerning The Subdivision of Lines of The Third Order Into KindsDocument27 pagesConcerning The Subdivision of Lines of The Third Order Into Kindsdavid.contatos4308No ratings yet
- Rectangular Wave Guides - Transverse Electric WavesDocument4 pagesRectangular Wave Guides - Transverse Electric WavesStefano RossiNo ratings yet
- Kronnig-Penney Using Block TheoremDocument6 pagesKronnig-Penney Using Block TheoremChris EvanNo ratings yet
- Determination of The Flexural Rigidity of A Beam From Limited Boundary MeasurementsDocument18 pagesDetermination of The Flexural Rigidity of A Beam From Limited Boundary MeasurementsV SUNIL 15MCD0021No ratings yet
- Chap 55555Document25 pagesChap 55555Jean Zyrelle AuronNo ratings yet
- Unit3 MathsDocument101 pagesUnit3 Mathstanay282004guptaNo ratings yet
- LXIX Olimpiada Matematyczna: Rozwiązania Zadań Konkursowych Zawodów Stopnia TrzeciegoDocument7 pagesLXIX Olimpiada Matematyczna: Rozwiązania Zadań Konkursowych Zawodów Stopnia TrzeciegoIlir HoxhaNo ratings yet
- KDV EquationDocument4 pagesKDV Equationdr_s_m_afzali8662No ratings yet
- LP RavanDocument4 pagesLP RavanvahidNo ratings yet
- Week3 - Lecture5 - Filled2Document2 pagesWeek3 - Lecture5 - Filled2izmitliserhat4No ratings yet
- Linear Models: Genesis Carrillo May 2019Document3 pagesLinear Models: Genesis Carrillo May 2019Genesis Carrillo GranizoNo ratings yet
- Quantum Mechanics Course PeriodicpotentialsDocument4 pagesQuantum Mechanics Course PeriodicpotentialsjlbalbNo ratings yet
- 2nd DerivativeDocument5 pages2nd DerivativeParishrut BadoniNo ratings yet
- Chapt 1 AnsDocument5 pagesChapt 1 AnsmulalolmaphalaNo ratings yet
- MA1506 Tutorial 11 SolutionsDocument6 pagesMA1506 Tutorial 11 SolutionsHe Xing DariusNo ratings yet
- Assign 3Document2 pagesAssign 3Adarsh Bandi100% (2)
- Regression Basics in Matrix Terms: 1 The Normal Equations of Least SquaresDocument3 pagesRegression Basics in Matrix Terms: 1 The Normal Equations of Least SquaresFucKerWengieNo ratings yet
- SOLUTION (2.1) : Free Body: CDDocument14 pagesSOLUTION (2.1) : Free Body: CDKhalil SayeeNo ratings yet
- Notes On Diophantine Geometry: Rational Points On Curves of Genus ZeroDocument56 pagesNotes On Diophantine Geometry: Rational Points On Curves of Genus ZeroSamuel SilvaNo ratings yet
- Beam ElasticDocument22 pagesBeam ElasticPankaj KarnaNo ratings yet
- Holder SpacesDocument6 pagesHolder SpacesManuel Argomedo SalirrosasNo ratings yet
- Contoh Soal RC PDFDocument23 pagesContoh Soal RC PDFIrfan Yahya IkhsanudinNo ratings yet
- Math425 Practice Final SolutionsDocument6 pagesMath425 Practice Final SolutionsI Gede ArjanaNo ratings yet
- HW 1 A 2013 SolutionDocument7 pagesHW 1 A 2013 SolutioncarsongbakerNo ratings yet
- Math 6110 Pset 2Document4 pagesMath 6110 Pset 2Miguel Antonio Leonardo SepulvedaNo ratings yet
- Continous Beams by TheoremDocument28 pagesContinous Beams by Theoremchaitu kNo ratings yet
- Module I: Electromagnetic Waves: Lectures 6-7: EM Waves in Confined SpacesDocument29 pagesModule I: Electromagnetic Waves: Lectures 6-7: EM Waves in Confined SpacesVaibhav MalviyaNo ratings yet
- Plates and Shells Theory and Analysis 4th Ugural Solution ManualDocument36 pagesPlates and Shells Theory and Analysis 4th Ugural Solution Manualpirl.broom.sx9ir100% (45)
- Full Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF Full ChapterDocument36 pagesFull Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF Full Chaptergadere.prick.k2x7q100% (25)
- Assignment MechanicsDocument12 pagesAssignment MechanicsRishav GogoiNo ratings yet
- Corotational Formulation For Beams.: September 2015Document22 pagesCorotational Formulation For Beams.: September 2015eggedNo ratings yet
- Lecture No. 04: Classification of Second Order PDE (A Topic of Unit II)Document19 pagesLecture No. 04: Classification of Second Order PDE (A Topic of Unit II)absaarhasan657No ratings yet
- C. F. Gauß 1818 Elliptische Ring MassenverteilungDocument20 pagesC. F. Gauß 1818 Elliptische Ring MassenverteilungMartinAlfonsNo ratings yet
- Exercicios Resolvidos Parte 3Document35 pagesExercicios Resolvidos Parte 3Lucas Venâncio da Silva SantosNo ratings yet
- Relativity Crib Sheet 2006Document2 pagesRelativity Crib Sheet 2006G. AlfredNo ratings yet
- Lecture NotesDocument47 pagesLecture NotesSam CrewNo ratings yet
- 4Document11 pages4fitriNo ratings yet
- Straight Lines-02 - Solved ExampleDocument14 pagesStraight Lines-02 - Solved ExampleRaju SinghNo ratings yet
- Relationship Between Extreme Points and Corresponding BFSDocument4 pagesRelationship Between Extreme Points and Corresponding BFSsatyajitNo ratings yet
- The Existence of Solutions of A Nonlinear Suspension Bridge EquationDocument10 pagesThe Existence of Solutions of A Nonlinear Suspension Bridge Equationei_m4ilNo ratings yet
- Midterm Solutions Phys 255 Sfu Simon Fraser UniversityDocument9 pagesMidterm Solutions Phys 255 Sfu Simon Fraser UniversitypreetsimonNo ratings yet
- Topic 3Document15 pagesTopic 3HENRY ZULUNo ratings yet
- PropagateDocument11 pagesPropagateMichel Rodrigues AndradeNo ratings yet
- SOLUTION (2.1) : Free Body: CDDocument14 pagesSOLUTION (2.1) : Free Body: CDehab elsawyNo ratings yet
- b2 ElectromagnetisimDocument16 pagesb2 ElectromagnetisimSifei ZhangNo ratings yet
- Solutions To Sample Final QuestionsDocument28 pagesSolutions To Sample Final QuestionscfisicasterNo ratings yet
- Real and Complex Connections For Canonical Gravity: Home Search Collections Journals About Contact Us My IopscienceDocument6 pagesReal and Complex Connections For Canonical Gravity: Home Search Collections Journals About Contact Us My IopsciencePatrick WongNo ratings yet
- PROBLEM 6.90: SolutionDocument10 pagesPROBLEM 6.90: SolutionJose Antonio P BNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Jab Saara India Vedantu Pe Online Padhega: Scholarship Admission TestDocument18 pagesJab Saara India Vedantu Pe Online Padhega: Scholarship Admission TestPoonam PatreNo ratings yet
- SAP HANA Modeling Guide For SAP HANA XS Advanced Model enDocument154 pagesSAP HANA Modeling Guide For SAP HANA XS Advanced Model enSiddhartha AnandNo ratings yet
- Edexcel GCE Core 4 Mathematics C4 6666/01 Advanced Subsidiary Jun 2005 Question PaperDocument24 pagesEdexcel GCE Core 4 Mathematics C4 6666/01 Advanced Subsidiary Jun 2005 Question Paperrainman875No ratings yet
- CAPE Applied Mathematics Past Papers 2005P1C PDFDocument8 pagesCAPE Applied Mathematics Past Papers 2005P1C PDFEquitable BrownNo ratings yet
- SP47Document177 pagesSP47Venkata Bhaskar DameraNo ratings yet
- University Law College QuettaDocument3 pagesUniversity Law College QuettaSardarNo ratings yet
- SSC Exam Question WeightageDocument4 pagesSSC Exam Question Weightageshavan sharmaNo ratings yet
- Arun K. PatiDocument2 pagesArun K. Patidroy21No ratings yet
- CE 636 Assignment 2Document2 pagesCE 636 Assignment 2Rodrigo RomeroNo ratings yet
- Binomial Theorem Material It JeeDocument99 pagesBinomial Theorem Material It JeeS Balachandar BalaNo ratings yet
- P 6 Week 2Document8 pagesP 6 Week 2Danica RafolsNo ratings yet
- F1 - Get The Most Out of Excel Formulas and FunctionsDocument485 pagesF1 - Get The Most Out of Excel Formulas and FunctionsSalman Awan100% (5)
- An Enhanced Computational Precision: Implementing A Graphical User Interface For Advanced Numerical TechniquesDocument11 pagesAn Enhanced Computational Precision: Implementing A Graphical User Interface For Advanced Numerical TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quantitative Aptitude - Vol 2Document93 pagesQuantitative Aptitude - Vol 2Ian MckenzyNo ratings yet
- Femh 104Document17 pagesFemh 104Dunil WadaskarNo ratings yet
- Math Paper 2023Document28 pagesMath Paper 2023naturofarms08No ratings yet
- Random Variables PDFDocument64 pagesRandom Variables PDFdeelipNo ratings yet
- RRB NTPC Syllabus PDFDocument10 pagesRRB NTPC Syllabus PDFRamya KumarNo ratings yet
- 120 Ebook Elementos Basicos 2016 POSADAS Co 159ppDocument549 pages120 Ebook Elementos Basicos 2016 POSADAS Co 159pporlando paezNo ratings yet
- Statistics and Quantitative TechniquesDocument3 pagesStatistics and Quantitative TechniquesnmngoelNo ratings yet
- Sctevt 3rd Sem Electrical Syllabus PDFDocument23 pagesSctevt 3rd Sem Electrical Syllabus PDFAshNo ratings yet
- Siddiqui, Shabnam - Quantum Mechanics - A Simplified Approach (2019, CRC Press)Document263 pagesSiddiqui, Shabnam - Quantum Mechanics - A Simplified Approach (2019, CRC Press)Sunkulp GoelNo ratings yet
- UVM Verification EnvironmentDocument74 pagesUVM Verification EnvironmentMayur KubavatNo ratings yet
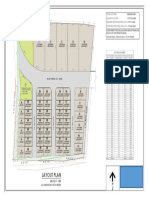
- PREN OF MALKAPUR LAYOUT NO. 208 (05-03-24) - ModelDocument1 pagePREN OF MALKAPUR LAYOUT NO. 208 (05-03-24) - ModelGanesh RasankarNo ratings yet
- Syllabus For 3rd SemDocument26 pagesSyllabus For 3rd SemSubhraneel SahaNo ratings yet
- FEM Matlab ProgramDocument4 pagesFEM Matlab ProgramleaNo ratings yet
- ODE Formula SheetDocument4 pagesODE Formula SheetJohnNo ratings yet
























































































Download as pdf or txt
You might also like
- Physics 481: Condensed Matter Physics - Homework 10Document2 pagesPhysics 481: Condensed Matter Physics - Homework 10Mike GarciaNo ratings yet
- Solutions Manual For Satellite Communications Second Edition Timothy Pratt Charles Bostian Jeremy AllnuttDocument201 pagesSolutions Manual For Satellite Communications Second Edition Timothy Pratt Charles Bostian Jeremy Allnuttmaurinkrsitel0571% (7)
- Principal Hypotheses and Assumptions in Strength of MaterialsDocument9 pagesPrincipal Hypotheses and Assumptions in Strength of MaterialsJason Ross100% (1)
- Ara Axapta500.edbDocument3,858 pagesAra Axapta500.edbAhmed Badawy0% (1)
- Truss StiffnessDocument9 pagesTruss StiffnessWyaette NhengoNo ratings yet
- MIT6 641s09 Sol Exam2008Document9 pagesMIT6 641s09 Sol Exam2008Omwami LenoxNo ratings yet
- Kronig PenneyDocument5 pagesKronig PenneyFurkan KozanNo ratings yet
- Vibration of A Free Free Beam Under TensDocument10 pagesVibration of A Free Free Beam Under Tensjean.vasco94No ratings yet
- Wave Guides - Derivation of The Wave EquationDocument3 pagesWave Guides - Derivation of The Wave EquationManoj KhatriNo ratings yet
- PDFDocument7 pagesPDFSanthosh KumarNo ratings yet
- Assignment4 SolutionsDocument5 pagesAssignment4 SolutionsRyan ArcherNo ratings yet
- 6 Band Theory of SolidsDocument38 pages6 Band Theory of SolidsRavi Teja100% (2)
- Concerning The Subdivision of Lines of The Third Order Into KindsDocument27 pagesConcerning The Subdivision of Lines of The Third Order Into Kindsdavid.contatos4308No ratings yet
- Rectangular Wave Guides - Transverse Electric WavesDocument4 pagesRectangular Wave Guides - Transverse Electric WavesStefano RossiNo ratings yet
- Kronnig-Penney Using Block TheoremDocument6 pagesKronnig-Penney Using Block TheoremChris EvanNo ratings yet
- Determination of The Flexural Rigidity of A Beam From Limited Boundary MeasurementsDocument18 pagesDetermination of The Flexural Rigidity of A Beam From Limited Boundary MeasurementsV SUNIL 15MCD0021No ratings yet
- Chap 55555Document25 pagesChap 55555Jean Zyrelle AuronNo ratings yet
- Unit3 MathsDocument101 pagesUnit3 Mathstanay282004guptaNo ratings yet
- LXIX Olimpiada Matematyczna: Rozwiązania Zadań Konkursowych Zawodów Stopnia TrzeciegoDocument7 pagesLXIX Olimpiada Matematyczna: Rozwiązania Zadań Konkursowych Zawodów Stopnia TrzeciegoIlir HoxhaNo ratings yet
- KDV EquationDocument4 pagesKDV Equationdr_s_m_afzali8662No ratings yet
- LP RavanDocument4 pagesLP RavanvahidNo ratings yet
- Week3 - Lecture5 - Filled2Document2 pagesWeek3 - Lecture5 - Filled2izmitliserhat4No ratings yet
- Linear Models: Genesis Carrillo May 2019Document3 pagesLinear Models: Genesis Carrillo May 2019Genesis Carrillo GranizoNo ratings yet
- Quantum Mechanics Course PeriodicpotentialsDocument4 pagesQuantum Mechanics Course PeriodicpotentialsjlbalbNo ratings yet
- 2nd DerivativeDocument5 pages2nd DerivativeParishrut BadoniNo ratings yet
- Chapt 1 AnsDocument5 pagesChapt 1 AnsmulalolmaphalaNo ratings yet
- MA1506 Tutorial 11 SolutionsDocument6 pagesMA1506 Tutorial 11 SolutionsHe Xing DariusNo ratings yet
- Assign 3Document2 pagesAssign 3Adarsh Bandi100% (2)
- Regression Basics in Matrix Terms: 1 The Normal Equations of Least SquaresDocument3 pagesRegression Basics in Matrix Terms: 1 The Normal Equations of Least SquaresFucKerWengieNo ratings yet
- SOLUTION (2.1) : Free Body: CDDocument14 pagesSOLUTION (2.1) : Free Body: CDKhalil SayeeNo ratings yet
- Notes On Diophantine Geometry: Rational Points On Curves of Genus ZeroDocument56 pagesNotes On Diophantine Geometry: Rational Points On Curves of Genus ZeroSamuel SilvaNo ratings yet
- Beam ElasticDocument22 pagesBeam ElasticPankaj KarnaNo ratings yet
- Holder SpacesDocument6 pagesHolder SpacesManuel Argomedo SalirrosasNo ratings yet
- Contoh Soal RC PDFDocument23 pagesContoh Soal RC PDFIrfan Yahya IkhsanudinNo ratings yet
- Math425 Practice Final SolutionsDocument6 pagesMath425 Practice Final SolutionsI Gede ArjanaNo ratings yet
- HW 1 A 2013 SolutionDocument7 pagesHW 1 A 2013 SolutioncarsongbakerNo ratings yet
- Math 6110 Pset 2Document4 pagesMath 6110 Pset 2Miguel Antonio Leonardo SepulvedaNo ratings yet
- Continous Beams by TheoremDocument28 pagesContinous Beams by Theoremchaitu kNo ratings yet
- Module I: Electromagnetic Waves: Lectures 6-7: EM Waves in Confined SpacesDocument29 pagesModule I: Electromagnetic Waves: Lectures 6-7: EM Waves in Confined SpacesVaibhav MalviyaNo ratings yet
- Plates and Shells Theory and Analysis 4th Ugural Solution ManualDocument36 pagesPlates and Shells Theory and Analysis 4th Ugural Solution Manualpirl.broom.sx9ir100% (45)
- Full Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF Full ChapterDocument36 pagesFull Download Plates and Shells Theory and Analysis 4th Ugural Solution Manual PDF Full Chaptergadere.prick.k2x7q100% (25)
- Assignment MechanicsDocument12 pagesAssignment MechanicsRishav GogoiNo ratings yet
- Corotational Formulation For Beams.: September 2015Document22 pagesCorotational Formulation For Beams.: September 2015eggedNo ratings yet
- Lecture No. 04: Classification of Second Order PDE (A Topic of Unit II)Document19 pagesLecture No. 04: Classification of Second Order PDE (A Topic of Unit II)absaarhasan657No ratings yet
- C. F. Gauß 1818 Elliptische Ring MassenverteilungDocument20 pagesC. F. Gauß 1818 Elliptische Ring MassenverteilungMartinAlfonsNo ratings yet
- Exercicios Resolvidos Parte 3Document35 pagesExercicios Resolvidos Parte 3Lucas Venâncio da Silva SantosNo ratings yet
- Relativity Crib Sheet 2006Document2 pagesRelativity Crib Sheet 2006G. AlfredNo ratings yet
- Lecture NotesDocument47 pagesLecture NotesSam CrewNo ratings yet
- 4Document11 pages4fitriNo ratings yet
- Straight Lines-02 - Solved ExampleDocument14 pagesStraight Lines-02 - Solved ExampleRaju SinghNo ratings yet
- Relationship Between Extreme Points and Corresponding BFSDocument4 pagesRelationship Between Extreme Points and Corresponding BFSsatyajitNo ratings yet
- The Existence of Solutions of A Nonlinear Suspension Bridge EquationDocument10 pagesThe Existence of Solutions of A Nonlinear Suspension Bridge Equationei_m4ilNo ratings yet
- Midterm Solutions Phys 255 Sfu Simon Fraser UniversityDocument9 pagesMidterm Solutions Phys 255 Sfu Simon Fraser UniversitypreetsimonNo ratings yet
- Topic 3Document15 pagesTopic 3HENRY ZULUNo ratings yet
- PropagateDocument11 pagesPropagateMichel Rodrigues AndradeNo ratings yet
- SOLUTION (2.1) : Free Body: CDDocument14 pagesSOLUTION (2.1) : Free Body: CDehab elsawyNo ratings yet
- b2 ElectromagnetisimDocument16 pagesb2 ElectromagnetisimSifei ZhangNo ratings yet
- Solutions To Sample Final QuestionsDocument28 pagesSolutions To Sample Final QuestionscfisicasterNo ratings yet
- Real and Complex Connections For Canonical Gravity: Home Search Collections Journals About Contact Us My IopscienceDocument6 pagesReal and Complex Connections For Canonical Gravity: Home Search Collections Journals About Contact Us My IopsciencePatrick WongNo ratings yet
- PROBLEM 6.90: SolutionDocument10 pagesPROBLEM 6.90: SolutionJose Antonio P BNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Jab Saara India Vedantu Pe Online Padhega: Scholarship Admission TestDocument18 pagesJab Saara India Vedantu Pe Online Padhega: Scholarship Admission TestPoonam PatreNo ratings yet
- SAP HANA Modeling Guide For SAP HANA XS Advanced Model enDocument154 pagesSAP HANA Modeling Guide For SAP HANA XS Advanced Model enSiddhartha AnandNo ratings yet
- Edexcel GCE Core 4 Mathematics C4 6666/01 Advanced Subsidiary Jun 2005 Question PaperDocument24 pagesEdexcel GCE Core 4 Mathematics C4 6666/01 Advanced Subsidiary Jun 2005 Question Paperrainman875No ratings yet
- CAPE Applied Mathematics Past Papers 2005P1C PDFDocument8 pagesCAPE Applied Mathematics Past Papers 2005P1C PDFEquitable BrownNo ratings yet
- SP47Document177 pagesSP47Venkata Bhaskar DameraNo ratings yet
- University Law College QuettaDocument3 pagesUniversity Law College QuettaSardarNo ratings yet
- SSC Exam Question WeightageDocument4 pagesSSC Exam Question Weightageshavan sharmaNo ratings yet
- Arun K. PatiDocument2 pagesArun K. Patidroy21No ratings yet
- CE 636 Assignment 2Document2 pagesCE 636 Assignment 2Rodrigo RomeroNo ratings yet
- Binomial Theorem Material It JeeDocument99 pagesBinomial Theorem Material It JeeS Balachandar BalaNo ratings yet
- P 6 Week 2Document8 pagesP 6 Week 2Danica RafolsNo ratings yet
- F1 - Get The Most Out of Excel Formulas and FunctionsDocument485 pagesF1 - Get The Most Out of Excel Formulas and FunctionsSalman Awan100% (5)
- An Enhanced Computational Precision: Implementing A Graphical User Interface For Advanced Numerical TechniquesDocument11 pagesAn Enhanced Computational Precision: Implementing A Graphical User Interface For Advanced Numerical TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quantitative Aptitude - Vol 2Document93 pagesQuantitative Aptitude - Vol 2Ian MckenzyNo ratings yet
- Femh 104Document17 pagesFemh 104Dunil WadaskarNo ratings yet
- Math Paper 2023Document28 pagesMath Paper 2023naturofarms08No ratings yet
- Random Variables PDFDocument64 pagesRandom Variables PDFdeelipNo ratings yet
- RRB NTPC Syllabus PDFDocument10 pagesRRB NTPC Syllabus PDFRamya KumarNo ratings yet
- 120 Ebook Elementos Basicos 2016 POSADAS Co 159ppDocument549 pages120 Ebook Elementos Basicos 2016 POSADAS Co 159pporlando paezNo ratings yet
- Statistics and Quantitative TechniquesDocument3 pagesStatistics and Quantitative TechniquesnmngoelNo ratings yet
- Sctevt 3rd Sem Electrical Syllabus PDFDocument23 pagesSctevt 3rd Sem Electrical Syllabus PDFAshNo ratings yet
- Siddiqui, Shabnam - Quantum Mechanics - A Simplified Approach (2019, CRC Press)Document263 pagesSiddiqui, Shabnam - Quantum Mechanics - A Simplified Approach (2019, CRC Press)Sunkulp GoelNo ratings yet
- UVM Verification EnvironmentDocument74 pagesUVM Verification EnvironmentMayur KubavatNo ratings yet
- PREN OF MALKAPUR LAYOUT NO. 208 (05-03-24) - ModelDocument1 pagePREN OF MALKAPUR LAYOUT NO. 208 (05-03-24) - ModelGanesh RasankarNo ratings yet
- Syllabus For 3rd SemDocument26 pagesSyllabus For 3rd SemSubhraneel SahaNo ratings yet
- FEM Matlab ProgramDocument4 pagesFEM Matlab ProgramleaNo ratings yet
- ODE Formula SheetDocument4 pagesODE Formula SheetJohnNo ratings yet