Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Variable Stresses With Stress ConcentrationsDocument16 pagesVariable Stresses With Stress ConcentrationsBryan GounzoNo ratings yet
- ResearchDocument1 pageResearchBryan GounzoNo ratings yet
- Act 1 3 2Document4 pagesAct 1 3 2Bryan GounzoNo ratings yet
- Advanced Rubber Tree Tapping MachineDocument1 pageAdvanced Rubber Tree Tapping MachineBryan GounzoNo ratings yet
- Prof Ed 221 - Activity 2Document1 pageProf Ed 221 - Activity 2Bryan GounzoNo ratings yet
- Ge6 Bse2aDocument5 pagesGe6 Bse2aBryan GounzoNo ratings yet
- Act 1 3 2Document4 pagesAct 1 3 2Bryan GounzoNo ratings yet
- Prof Ed 221-BSE 2A - Matin, Laurence-2Document2 pagesProf Ed 221-BSE 2A - Matin, Laurence-2Bryan GounzoNo ratings yet
- Mat Sci-Activity 1Document1 pageMat Sci-Activity 1Bryan GounzoNo ratings yet
- Me 321 Machine Design 1 IntroDocument10 pagesMe 321 Machine Design 1 IntroBryan GounzoNo ratings yet
- 1a Chapter-1-Intro-LIT-111Document11 pages1a Chapter-1-Intro-LIT-111Bryan GounzoNo ratings yet
- 1 Analysis of Simple StressesDocument16 pages1 Analysis of Simple StressesBryan GounzoNo ratings yet
- 2 ME 322 - Topic1 - INTRODUCTION TO COMBUSTION ENGINEERINGDocument4 pages2 ME 322 - Topic1 - INTRODUCTION TO COMBUSTION ENGINEERINGBryan GounzoNo ratings yet
- A Time To Know The PastDocument2 pagesA Time To Know The PastBryan GounzoNo ratings yet
- 2a Chapter-2-Prose-LIT-111Document36 pages2a Chapter-2-Prose-LIT-111Bryan GounzoNo ratings yet
- I. Terms Related To Alternating WavesDocument1 pageI. Terms Related To Alternating WavesBryan GounzoNo ratings yet
- 1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualDocument144 pages1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualjaysonlkhNo ratings yet
- ASP Webconfig FullDocument5 pagesASP Webconfig FullaravindwinNo ratings yet
- Unit 3 Forces in Equilibrium: Summary QuestionsDocument1 pageUnit 3 Forces in Equilibrium: Summary QuestionsShunasiNo ratings yet
- FIR Filters-Concept of Linear PhaseDocument38 pagesFIR Filters-Concept of Linear PhaseJaynil PatelNo ratings yet
- Tabel Astm: Table 53 Density Reduction To 15 CDocument32 pagesTabel Astm: Table 53 Density Reduction To 15 CSyukriYansyahNo ratings yet
- Max Iaq Ambient Air Monitoring en ps53599Document2 pagesMax Iaq Ambient Air Monitoring en ps53599TaylorNo ratings yet
- Ref 2Document4 pagesRef 2yeyegak481No ratings yet
- Or6 st3 PDFDocument4 pagesOr6 st3 PDFerajNo ratings yet
- EZ Voice User ManualDocument23 pagesEZ Voice User ManualmagalyNo ratings yet
- Health & Performance Monitoring Using Active Magnetic BearingsDocument104 pagesHealth & Performance Monitoring Using Active Magnetic BearingsAbhinav RajNo ratings yet
- Dbms TutorialDocument13 pagesDbms TutorialJonnalyn CañadaNo ratings yet
- Stiffened RoundDocument16 pagesStiffened RoundIoannis Mitsis100% (1)
- Sicor Geared 10 Feb20Document8 pagesSicor Geared 10 Feb20Pritesh NaikNo ratings yet
- Vsphere Esxi Vcenter Server 60 Storage GuideDocument286 pagesVsphere Esxi Vcenter Server 60 Storage Guideพูลพิพัฒน์ สุขเกษมNo ratings yet
- Lighting in Interior DesignDocument17 pagesLighting in Interior DesignEric MagnayeNo ratings yet
- Modeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDDocument24 pagesModeling Thermal Expansion in Ansys: 6/24/2017 Alex Grishin, PHDAchmad Nur HusainiNo ratings yet
- Slides MLRDocument17 pagesSlides MLRmrityunjayNo ratings yet
- Vacuum MetallurgyDocument20 pagesVacuum MetallurgyTGrey027No ratings yet
- Constructor and DestructorDocument22 pagesConstructor and DestructorKinza ChoudharyNo ratings yet
- Description Features: PT7314E Stereo Audio Processor For Home/TV AudioDocument16 pagesDescription Features: PT7314E Stereo Audio Processor For Home/TV AudioJose CazonNo ratings yet
- 3.SAFA AOCS 4th Ed Ce 2-66 1994Document6 pages3.SAFA AOCS 4th Ed Ce 2-66 1994Rofiyanti WibowoNo ratings yet
- DB2BP Query Tuning 0508IDocument38 pagesDB2BP Query Tuning 0508IfallenlordNo ratings yet
- Properties of Quadrilaterals WorksheetDocument4 pagesProperties of Quadrilaterals WorksheetWhitney Garnai0% (1)
- Upgrading To Windows 8.1: A Guide For Windows 7 UsersDocument9 pagesUpgrading To Windows 8.1: A Guide For Windows 7 UsersShoiimuL MohamadNo ratings yet
- Lab 7Document14 pagesLab 7stiviNo ratings yet
- Grade 1. SSES Enhanced Mathematics Curriculum 1 PDF Shape PatternDocument1 pageGrade 1. SSES Enhanced Mathematics Curriculum 1 PDF Shape Patternarlyn reyesNo ratings yet
- TLP Modul 3Document32 pagesTLP Modul 3Fauzan MiracleNo ratings yet
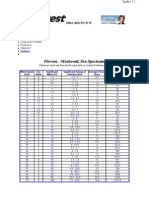
- Pierson MoskovitzDocument2 pagesPierson Moskovitzmavi1979No ratings yet
- French Numerical AdjectivesDocument1 pageFrench Numerical Adjectivesdiah_mulcil06No ratings yet
- AY-MR6111E Long Range ReaderDocument4 pagesAY-MR6111E Long Range ReadercharlesNo ratings yet