
Electric Machine Ch06
Electric Machine Ch06
You might also like
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- 5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsDocument6 pages5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsJOHN MINKHANTNo ratings yet
- Chapter 3 - Induction Motor ContDocument37 pagesChapter 3 - Induction Motor ContMuhammadNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Induction GeneratorDocument61 pagesInduction Generatorayash mohantyNo ratings yet
- Ind MDocument10 pagesInd MJOHN MINKHANTNo ratings yet
- 3 PhaseInductionMotors BookChapter 1Document19 pages3 PhaseInductionMotors BookChapter 1Rohan ShrivastavaNo ratings yet
- Determining Rotor Leakage ReactanceDocument5 pagesDetermining Rotor Leakage ReactanceGaspar RodríguezNo ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Ac Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. RashidDocument27 pagesAc Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. Rashid17031 Nazmul HasanNo ratings yet
- Ac Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. RashidDocument27 pagesAc Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. Rashid17031 Nazmul HasanNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Polyphase Induction Motor: Course MaterialDocument20 pagesPolyphase Induction Motor: Course MaterialBu DakNo ratings yet
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 pagesElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeNo ratings yet
- Chapter 3 Induction MotorDocument21 pagesChapter 3 Induction Motorahmed aliNo ratings yet
- Three-Phase Induction Motor: Shadhon Chandra MohontaDocument16 pagesThree-Phase Induction Motor: Shadhon Chandra Mohontamonster promelNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Ee 212 Ac Induction MotorsDocument9 pagesEe 212 Ac Induction MotorsabigabacNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- Ref 21Document7 pagesRef 21mssmsNo ratings yet
- The Dynamic Braking of Induction MotorsDocument9 pagesThe Dynamic Braking of Induction MotorsSúta SzalaiNo ratings yet
- Three-Phase Induction MotorDocument17 pagesThree-Phase Induction MotorAdarsh AdarshNo ratings yet
- Induction Machine Chapter No 7Document57 pagesInduction Machine Chapter No 7bhaktameltNo ratings yet
- 02 Single Phase Im 02Document8 pages02 Single Phase Im 02Suleiman Abubakar AuduNo ratings yet
- 3 Phase IM MotorDocument26 pages3 Phase IM MotorKeshav SundarNo ratings yet
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcNo ratings yet
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- To Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Document11 pagesTo Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Soumya Ranjan NayakNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- Dynamic Model of Induction Motors For Vector ControlDocument10 pagesDynamic Model of Induction Motors For Vector ControlMarica RalucaNo ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
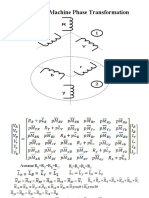
- Induction Machine Phase TransformationDocument20 pagesInduction Machine Phase Transformation7sn omerNo ratings yet
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocument12 pagesPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarNo ratings yet
- Sardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramDocument23 pagesSardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramSANJAYNo ratings yet
- Chalmers 1972Document8 pagesChalmers 1972Iraqi stormNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- 17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7Document18 pages17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7ming yangNo ratings yet
- Ee2302 - Electrical Machines Ii Question Bank Short Answer QuestionsDocument5 pagesEe2302 - Electrical Machines Ii Question Bank Short Answer QuestionsKarthi RamachandranNo ratings yet
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocument55 pagesChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiNo ratings yet
- Chapter 5 - AC Machine - Part2Document48 pagesChapter 5 - AC Machine - Part2Mahesh PushpakumaraNo ratings yet
- Induction MotorDocument6 pagesInduction MotorMuhamad NafianNo ratings yet
- Ac Motor: Induction Motor (Asynchronous Motor) Synchronous MotorDocument62 pagesAc Motor: Induction Motor (Asynchronous Motor) Synchronous MotorWeehao SiowNo ratings yet
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Induction MotorsDocument14 pagesInduction MotorsAbdul RaheemNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Modern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlFrom EverandModern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Wireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesFrom EverandWireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesNo ratings yet
- Electricity in Fish Research and Management: Theory and PracticeFrom EverandElectricity in Fish Research and Management: Theory and PracticeNo ratings yet
- Lesson No. 2Document111 pagesLesson No. 2Jorge BautistaNo ratings yet
- Analog MultiplierDocument13 pagesAnalog MultipliersmartdeepjariwalaNo ratings yet
- OGDCL MTO Training Test 2017Document4 pagesOGDCL MTO Training Test 2017AHMAD AHSAN50% (2)
- ACS 50 User S GuideDocument20 pagesACS 50 User S GuidelupelupeNo ratings yet
- Electricity and Magnetism Handouts 1Document5 pagesElectricity and Magnetism Handouts 1Homo CiderNo ratings yet
- YT-2500 Smart PositionerDocument43 pagesYT-2500 Smart Positionermsalem73No ratings yet
- Current Electricity - Student Workbook v3Document35 pagesCurrent Electricity - Student Workbook v3melissa.figueroamoralesNo ratings yet
- ABB Price Book 713Document1 pageABB Price Book 713EliasNo ratings yet
- Upload-Corrigendum - Annexure ADocument28 pagesUpload-Corrigendum - Annexure ARuchir ChaturvediNo ratings yet
- SymphoniePRO® Data Logger - 26 CH & 16 CHDocument7 pagesSymphoniePRO® Data Logger - 26 CH & 16 CHAni dwi OctaviaNo ratings yet
- Luzon Grid Loepp-08312022Document5 pagesLuzon Grid Loepp-08312022KianNo ratings yet
- JY1Y9Z.final JBVNL Cost Data Book 2022-23Document219 pagesJY1Y9Z.final JBVNL Cost Data Book 2022-23Sahil MohammedNo ratings yet
- Description Features: 1.2A 1.5Mhz 7V Synchronous Buck ConverterDocument7 pagesDescription Features: 1.2A 1.5Mhz 7V Synchronous Buck ConverterGeovanny SanJuanNo ratings yet
- Choke Coil PanasonicDocument2 pagesChoke Coil Panasonicmautron1213No ratings yet
- Rope Run-Out System For GT-550E-1 Parts (Brands San Ver.)Document2 pagesRope Run-Out System For GT-550E-1 Parts (Brands San Ver.)Rafik MessaNo ratings yet
- EC237Document1 pageEC237adNo ratings yet
- SDM Philips 32pfl4Document4 pagesSDM Philips 32pfl4Sharon JacksonNo ratings yet
- DC-Jumper Cable - 2x6 Mm2 48 V YSLYCYDocument1 pageDC-Jumper Cable - 2x6 Mm2 48 V YSLYCYChusé Antón Burillo ArbejNo ratings yet
- Cisco SG95-24Document5 pagesCisco SG95-24Ulya HasnaNo ratings yet
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocument40 pagesWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanNo ratings yet
- 12V - 15-21V Car Inverter For NotebookDocument3 pages12V - 15-21V Car Inverter For Notebookmohamed lamine elbiskriNo ratings yet
- Automatic Headlight Dimmer & Automatic Keyless EntryDocument43 pagesAutomatic Headlight Dimmer & Automatic Keyless Entrylng_babie1967% (3)
- Tga D3 800TVDocument1 pageTga D3 800TVJulian Andres VictoriaNo ratings yet
- Chemi-Con KZG Series Electrolytic Capacitors DatasheetDocument2 pagesChemi-Con KZG Series Electrolytic Capacitors DatasheetJBHignNo ratings yet
- RilandDocument26 pagesRilandDiego Gonzalez BelloNo ratings yet
- Load Cell BasicsDocument3 pagesLoad Cell BasicsMohamed Meeran100% (1)
- Transistor de Potencia MJ15015 PDFDocument6 pagesTransistor de Potencia MJ15015 PDFMartinNo ratings yet
- Manual UPS HPH 20-30-40kVA en UsDocument66 pagesManual UPS HPH 20-30-40kVA en Usjamilsoria100% (3)
- Underground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnDocument24 pagesUnderground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnSUKESH GUPTANo ratings yet
- VIBXPERT - EX - Catalog - en ManualDocument61 pagesVIBXPERT - EX - Catalog - en ManualnguyennhatbaoNo ratings yet
























































































Download as pdf or txt
You might also like
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- 5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsDocument6 pages5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsJOHN MINKHANTNo ratings yet
- Chapter 3 - Induction Motor ContDocument37 pagesChapter 3 - Induction Motor ContMuhammadNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Induction GeneratorDocument61 pagesInduction Generatorayash mohantyNo ratings yet
- Ind MDocument10 pagesInd MJOHN MINKHANTNo ratings yet
- 3 PhaseInductionMotors BookChapter 1Document19 pages3 PhaseInductionMotors BookChapter 1Rohan ShrivastavaNo ratings yet
- Determining Rotor Leakage ReactanceDocument5 pagesDetermining Rotor Leakage ReactanceGaspar RodríguezNo ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Ac Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. RashidDocument27 pagesAc Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. Rashid17031 Nazmul HasanNo ratings yet
- Ac Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. RashidDocument27 pagesAc Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. Rashid17031 Nazmul HasanNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Polyphase Induction Motor: Course MaterialDocument20 pagesPolyphase Induction Motor: Course MaterialBu DakNo ratings yet
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 pagesElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeNo ratings yet
- Chapter 3 Induction MotorDocument21 pagesChapter 3 Induction Motorahmed aliNo ratings yet
- Three-Phase Induction Motor: Shadhon Chandra MohontaDocument16 pagesThree-Phase Induction Motor: Shadhon Chandra Mohontamonster promelNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- Ee 212 Ac Induction MotorsDocument9 pagesEe 212 Ac Induction MotorsabigabacNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- Ref 21Document7 pagesRef 21mssmsNo ratings yet
- The Dynamic Braking of Induction MotorsDocument9 pagesThe Dynamic Braking of Induction MotorsSúta SzalaiNo ratings yet
- Three-Phase Induction MotorDocument17 pagesThree-Phase Induction MotorAdarsh AdarshNo ratings yet
- Induction Machine Chapter No 7Document57 pagesInduction Machine Chapter No 7bhaktameltNo ratings yet
- 02 Single Phase Im 02Document8 pages02 Single Phase Im 02Suleiman Abubakar AuduNo ratings yet
- 3 Phase IM MotorDocument26 pages3 Phase IM MotorKeshav SundarNo ratings yet
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcNo ratings yet
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- To Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Document11 pagesTo Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Soumya Ranjan NayakNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- Dynamic Model of Induction Motors For Vector ControlDocument10 pagesDynamic Model of Induction Motors For Vector ControlMarica RalucaNo ratings yet
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
- Induction Machine Phase TransformationDocument20 pagesInduction Machine Phase Transformation7sn omerNo ratings yet
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorDocument12 pagesPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarNo ratings yet
- Sardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramDocument23 pagesSardar Vallabhbhai Patel Institute of Technology, Vasad: Equivalent Circuit of Induction Motor & Phasor DiagramSANJAYNo ratings yet
- Chalmers 1972Document8 pagesChalmers 1972Iraqi stormNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- 17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7Document18 pages17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7ming yangNo ratings yet
- Ee2302 - Electrical Machines Ii Question Bank Short Answer QuestionsDocument5 pagesEe2302 - Electrical Machines Ii Question Bank Short Answer QuestionsKarthi RamachandranNo ratings yet
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocument55 pagesChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiNo ratings yet
- Chapter 5 - AC Machine - Part2Document48 pagesChapter 5 - AC Machine - Part2Mahesh PushpakumaraNo ratings yet
- Induction MotorDocument6 pagesInduction MotorMuhamad NafianNo ratings yet
- Ac Motor: Induction Motor (Asynchronous Motor) Synchronous MotorDocument62 pagesAc Motor: Induction Motor (Asynchronous Motor) Synchronous MotorWeehao SiowNo ratings yet
- Design and Simulation of Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesDesign and Simulation of Field Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Induction MotorsDocument14 pagesInduction MotorsAbdul RaheemNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Modern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlFrom EverandModern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Wireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesFrom EverandWireless Power Transfer: Using Magnetic and Electric Resonance Coupling TechniquesNo ratings yet
- Electricity in Fish Research and Management: Theory and PracticeFrom EverandElectricity in Fish Research and Management: Theory and PracticeNo ratings yet
- Lesson No. 2Document111 pagesLesson No. 2Jorge BautistaNo ratings yet
- Analog MultiplierDocument13 pagesAnalog MultipliersmartdeepjariwalaNo ratings yet
- OGDCL MTO Training Test 2017Document4 pagesOGDCL MTO Training Test 2017AHMAD AHSAN50% (2)
- ACS 50 User S GuideDocument20 pagesACS 50 User S GuidelupelupeNo ratings yet
- Electricity and Magnetism Handouts 1Document5 pagesElectricity and Magnetism Handouts 1Homo CiderNo ratings yet
- YT-2500 Smart PositionerDocument43 pagesYT-2500 Smart Positionermsalem73No ratings yet
- Current Electricity - Student Workbook v3Document35 pagesCurrent Electricity - Student Workbook v3melissa.figueroamoralesNo ratings yet
- ABB Price Book 713Document1 pageABB Price Book 713EliasNo ratings yet
- Upload-Corrigendum - Annexure ADocument28 pagesUpload-Corrigendum - Annexure ARuchir ChaturvediNo ratings yet
- SymphoniePRO® Data Logger - 26 CH & 16 CHDocument7 pagesSymphoniePRO® Data Logger - 26 CH & 16 CHAni dwi OctaviaNo ratings yet
- Luzon Grid Loepp-08312022Document5 pagesLuzon Grid Loepp-08312022KianNo ratings yet
- JY1Y9Z.final JBVNL Cost Data Book 2022-23Document219 pagesJY1Y9Z.final JBVNL Cost Data Book 2022-23Sahil MohammedNo ratings yet
- Description Features: 1.2A 1.5Mhz 7V Synchronous Buck ConverterDocument7 pagesDescription Features: 1.2A 1.5Mhz 7V Synchronous Buck ConverterGeovanny SanJuanNo ratings yet
- Choke Coil PanasonicDocument2 pagesChoke Coil Panasonicmautron1213No ratings yet
- Rope Run-Out System For GT-550E-1 Parts (Brands San Ver.)Document2 pagesRope Run-Out System For GT-550E-1 Parts (Brands San Ver.)Rafik MessaNo ratings yet
- EC237Document1 pageEC237adNo ratings yet
- SDM Philips 32pfl4Document4 pagesSDM Philips 32pfl4Sharon JacksonNo ratings yet
- DC-Jumper Cable - 2x6 Mm2 48 V YSLYCYDocument1 pageDC-Jumper Cable - 2x6 Mm2 48 V YSLYCYChusé Antón Burillo ArbejNo ratings yet
- Cisco SG95-24Document5 pagesCisco SG95-24Ulya HasnaNo ratings yet
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocument40 pagesWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanNo ratings yet
- 12V - 15-21V Car Inverter For NotebookDocument3 pages12V - 15-21V Car Inverter For Notebookmohamed lamine elbiskriNo ratings yet
- Automatic Headlight Dimmer & Automatic Keyless EntryDocument43 pagesAutomatic Headlight Dimmer & Automatic Keyless Entrylng_babie1967% (3)
- Tga D3 800TVDocument1 pageTga D3 800TVJulian Andres VictoriaNo ratings yet
- Chemi-Con KZG Series Electrolytic Capacitors DatasheetDocument2 pagesChemi-Con KZG Series Electrolytic Capacitors DatasheetJBHignNo ratings yet
- RilandDocument26 pagesRilandDiego Gonzalez BelloNo ratings yet
- Load Cell BasicsDocument3 pagesLoad Cell BasicsMohamed Meeran100% (1)
- Transistor de Potencia MJ15015 PDFDocument6 pagesTransistor de Potencia MJ15015 PDFMartinNo ratings yet
- Manual UPS HPH 20-30-40kVA en UsDocument66 pagesManual UPS HPH 20-30-40kVA en Usjamilsoria100% (3)
- Underground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnDocument24 pagesUnderground Cable Fault Location Using Arduino, GSM & GPS: Presentation of Main Project OnSUKESH GUPTANo ratings yet
- VIBXPERT - EX - Catalog - en ManualDocument61 pagesVIBXPERT - EX - Catalog - en ManualnguyennhatbaoNo ratings yet