Download as docx, pdf, or txt
You might also like
- Strongholds of HeritageDocument9 pagesStrongholds of Heritageusman zafarNo ratings yet
- Cpu CP352 3330142-1Document3 pagesCpu CP352 3330142-1JAIR VIEIRA DE SOUZA JUNIORNo ratings yet
- Self Lab Audit ChecklistDocument4 pagesSelf Lab Audit ChecklistOmkar Shinde100% (1)
- Sonnia Kato (32216094) Microcontroller (Arduino Kawalan Brushless DC Fan Motor Dan Paparan LCD) Sistem MulaDocument3 pagesSonnia Kato (32216094) Microcontroller (Arduino Kawalan Brushless DC Fan Motor Dan Paparan LCD) Sistem MulaPatricia KCNo ratings yet
- Skematik Simpan File Text Pada SD CardDocument1 pageSkematik Simpan File Text Pada SD CardImanuelNo ratings yet
- Gene VictorDocument1 pageGene Victorh2jmkjfdpsNo ratings yet
- LAB. 3: Liquid Crystal Display (LCD) and TimerDocument1 pageLAB. 3: Liquid Crystal Display (LCD) and TimerCham RaulNo ratings yet
- Skematik Stop Watch Tampilan LCDDocument1 pageSkematik Stop Watch Tampilan LCDEka KusyantoNo ratings yet
- Smoke Alarm - PresentationDocument17 pagesSmoke Alarm - Presentationrenuka dixaNo ratings yet
- Nama: Wulan Indri Safitri Kelas: B NIM: 18.061Document1 pageNama: Wulan Indri Safitri Kelas: B NIM: 18.061Wulan Indri SafitriNo ratings yet
- Solar CleaningDocument72 pagesSolar CleaningVENKATNo ratings yet
- MegaproDocument1 pageMegaproHafiz A BNo ratings yet
- LCF SchematicDocument1 pageLCF SchematicGreenoceanNo ratings yet
- Skematik Alarm OtomatisDocument1 pageSkematik Alarm OtomatisEka KusyantoNo ratings yet
- UpsDocument15 pagesUpsNilkanth PatelNo ratings yet
- Schematics 2 CH Suhu DS1820 Lm35 PDFDocument1 pageSchematics 2 CH Suhu DS1820 Lm35 PDFImanuel100% (1)
- Schematics 2 CH Suhu DS1820 Lm35Document1 pageSchematics 2 CH Suhu DS1820 Lm35Mbok DarmiNo ratings yet
- Train Anti - Collision and Fire Security System: Presented S.Sandeep KumarDocument24 pagesTrain Anti - Collision and Fire Security System: Presented S.Sandeep KumarsandeepNo ratings yet
- SimulationDocument1 pageSimulationShompod ShakerNo ratings yet
- Laporan Blood MixerDocument7 pagesLaporan Blood Mixerkontol guedeNo ratings yet
- Ex - Segundoparcial V1.3Document1 pageEx - Segundoparcial V1.3kevin montañoNo ratings yet
- Stop Watch Tampilan LCDDocument1 pageStop Watch Tampilan LCDEka KusyantoNo ratings yet
- INV BAT: Beban Indikator PVDocument1 pageINV BAT: Beban Indikator PVMuhammad YusufNo ratings yet
- Skematik Stop Watch Tampilan LCDDocument1 pageSkematik Stop Watch Tampilan LCDEka KusyantoNo ratings yet
- Servo Motor 1 Servo Motor 2Document15 pagesServo Motor 1 Servo Motor 2Aniket ChouhanNo ratings yet
- LCD At16Document1 pageLCD At16Yudi Wahyu PribadiNo ratings yet
- DesignDocument1 pageDesignRayen BahriNo ratings yet
- 16x2 LCD Module With Header Connector 1Document1 page16x2 LCD Module With Header Connector 1ffyddNo ratings yet
- Adinew BabuDocument13 pagesAdinew BabuTariku MehdiNo ratings yet
- Lamp IranDocument24 pagesLamp IranAPRILIA MAHARANINo ratings yet
- Medicine ReminderDocument1 pageMedicine Reminderhamed razaNo ratings yet
- Skema Modul Hardware Praktikum Avr Uc1Document1 pageSkema Modul Hardware Praktikum Avr Uc1Nampo officialNo ratings yet
- Project 88: Monitoring Suhu 4 Channel Tampilan Delphi: I N K U B A T e K J o G J ADocument1 pageProject 88: Monitoring Suhu 4 Channel Tampilan Delphi: I N K U B A T e K J o G J AImanuelNo ratings yet
- LCD 4 BitDocument1 pageLCD 4 BitPhap NguyenNo ratings yet
- Final Exam Topic 4 - Example Questions - TimersDocument6 pagesFinal Exam Topic 4 - Example Questions - TimersTiến ThànhNo ratings yet
- Final Exam Topic 5 - Example Questions - UARTDocument6 pagesFinal Exam Topic 5 - Example Questions - UARTTiến ThànhNo ratings yet
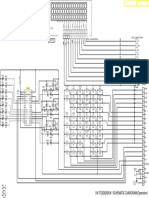
- NC LCD: KX-TS3282BXW SCHEMATIC DIARGRAM (Operation)Document1 pageNC LCD: KX-TS3282BXW SCHEMATIC DIARGRAM (Operation)korodijNo ratings yet
- SensorDocument1 pageSensorLuis German NiñoNo ratings yet
- Schematic PDFDocument1 pageSchematic PDFViệt Nguyễn100% (2)
- Schematic PDFDocument1 pageSchematic PDFViệt NguyễnNo ratings yet
- Arduino 328PDF - 230606 - 045833Document2 pagesArduino 328PDF - 230606 - 045833Arthur LealNo ratings yet
- Dieu Hoa Nhiet DoDocument1 pageDieu Hoa Nhiet Dothuongtnutdt04No ratings yet
- Schematic - KM409 LC Meter - Sheet - 1 - 20190904222557Document1 pageSchematic - KM409 LC Meter - Sheet - 1 - 20190904222557Allahrakha LambooNo ratings yet
- KTDLDocument2 pagesKTDLGiáp TrầnNo ratings yet
- Khối Hiển Thị Khối Nguồn: báo nhiệt độ dùng LM35Document1 pageKhối Hiển Thị Khối Nguồn: báo nhiệt độ dùng LM35Phạm Mạnh ĐứcNo ratings yet
- Robocore - LCD Shield V1.0: BotoesDocument1 pageRobocore - LCD Shield V1.0: BotoesJefferson BentesNo ratings yet
- Transistor Tester SchematicDocument1 pageTransistor Tester SchematicAbdulraouf Defnany100% (3)
- Oliver HM-20Document1 pageOliver HM-20Marcus FeilNo ratings yet
- Schematics-1226010 220907 131659Document3 pagesSchematics-1226010 220907 131659Anonymous 4voU8tNo ratings yet
- Mackie ProFX16 USB Codec SchematicDocument1 pageMackie ProFX16 USB Codec SchematicJames MontalvoNo ratings yet
- Mackie Profx16 Usb Codec SchematicDocument1 pageMackie Profx16 Usb Codec SchematicRULY BRAMSNo ratings yet
- BRD BLACK MicroController AGV Smart Pallet V.5Document1 pageBRD BLACK MicroController AGV Smart Pallet V.5dinNo ratings yet
- BRD COLOR MicroController AGV Smart Pallet V.5Document1 pageBRD COLOR MicroController AGV Smart Pallet V.5dinNo ratings yet
- Universal PWM Driver: 7805 IC2 +5V V+Document2 pagesUniversal PWM Driver: 7805 IC2 +5V V+Mile Martinov100% (1)
- HF LBP100Document1 pageHF LBP100vijaykumarn100% (3)
- MLT199TL: 1.5mH 750uhDocument3 pagesMLT199TL: 1.5mH 750uhAziz KamelNo ratings yet
- Frecuencimetro Proyecto Analogica-1Document1 pageFrecuencimetro Proyecto Analogica-1Vinicio Quilumba100% (1)
- Power Supply ESP-WROOM-32: Usb To UartDocument1 pagePower Supply ESP-WROOM-32: Usb To UartEverestNo ratings yet
- Residential PlanDocument21 pagesResidential PlanShai Marie Abao-PacturanNo ratings yet
- MachvxlDocument1 pageMachvxlViet HoangNo ratings yet
- Power - Integrations:TO-220: Title: Class D AmplifierDocument1 pagePower - Integrations:TO-220: Title: Class D AmplifierCường Mchw100% (1)
- Fill Your Glass With Gold-When It's Half-Full or Even Completely ShatteredFrom EverandFill Your Glass With Gold-When It's Half-Full or Even Completely ShatteredNo ratings yet
- Intelligent and Advance Traffic Management SystemDocument29 pagesIntelligent and Advance Traffic Management Systemhamed razaNo ratings yet
- Acs 712Document13 pagesAcs 712hamed razaNo ratings yet
- Home AutomationDocument17 pagesHome Automationhamed razaNo ratings yet
- A Car Parking Guard Circuit Using Infrared SensorDocument9 pagesA Car Parking Guard Circuit Using Infrared Sensorhamed razaNo ratings yet
- Gas DetectorDocument38 pagesGas Detectorhamed razaNo ratings yet
- Automatic Drainage Cleaning System: Ajay Sharma Ankur Singh Mahipal SinghDocument2 pagesAutomatic Drainage Cleaning System: Ajay Sharma Ankur Singh Mahipal Singhhamed razaNo ratings yet
- A Deep Learning Model Based On Concatenation Approach For The Diagnosis of Brain TumorDocument10 pagesA Deep Learning Model Based On Concatenation Approach For The Diagnosis of Brain Tumorhamed razaNo ratings yet
- IOT Controlled Robotic Vehicle: TeamDocument4 pagesIOT Controlled Robotic Vehicle: Teamhamed razaNo ratings yet
- Automatic Ambulance Rescue SystemDocument7 pagesAutomatic Ambulance Rescue Systemhamed razaNo ratings yet
- Real Time Gps and GSM Based Automatic Ambulance Rescue System With IotDocument5 pagesReal Time Gps and GSM Based Automatic Ambulance Rescue System With Iothamed razaNo ratings yet
- Clap Switch Using ArduinoDocument7 pagesClap Switch Using Arduinohamed razaNo ratings yet
- Drain Cleaner PptsDocument14 pagesDrain Cleaner Pptshamed razaNo ratings yet
- Design and Analysis of IoT-Based Intelligent Robot For Real-Time Monitoring and ControlDocument13 pagesDesign and Analysis of IoT-Based Intelligent Robot For Real-Time Monitoring and Controlhamed razaNo ratings yet
- IOT Based Automatic Vehicle Accident Detection and Rescue SystemDocument2 pagesIOT Based Automatic Vehicle Accident Detection and Rescue Systemhamed razaNo ratings yet
- Brain Tumor Detection Using Deep Learning: Birla Vishvakarma Mahavidyalaya Vallabh Vidyanagar - 388120 Gujarat, IndiaDocument40 pagesBrain Tumor Detection Using Deep Learning: Birla Vishvakarma Mahavidyalaya Vallabh Vidyanagar - 388120 Gujarat, Indiahamed razaNo ratings yet
- Automatic Water Dispenser Using ArduinoDocument4 pagesAutomatic Water Dispenser Using Arduinohamed raza100% (1)
- Automatic Street Light Using ArduinoDocument2 pagesAutomatic Street Light Using Arduinohamed razaNo ratings yet
- Fire Alarm SystemDocument6 pagesFire Alarm Systemhamed razaNo ratings yet
- Set-369. Solar Power Based Industrial Boiler Controller With Temperature DisplayDocument3 pagesSet-369. Solar Power Based Industrial Boiler Controller With Temperature Displayhamed razaNo ratings yet
- Home AutomationDocument18 pagesHome Automationhamed razaNo ratings yet
- Presented by Name: UsnDocument9 pagesPresented by Name: Usnhamed razaNo ratings yet
- Automatic Hand Sanitizer DispenserDocument19 pagesAutomatic Hand Sanitizer Dispenserhamed razaNo ratings yet
- Xi Chemistry Past Paper Karachi Board: Page 1 of 68Document68 pagesXi Chemistry Past Paper Karachi Board: Page 1 of 68salman100% (1)
- Energol HLP-HM 32Document5 pagesEnergol HLP-HM 32fidan muradovaNo ratings yet
- VolcanoesDocument14 pagesVolcanoesSHANNEL ANN VILLUGANo ratings yet
- Letter of DiscrepancyDocument1 pageLetter of DiscrepancyImam MekarNo ratings yet
- Brgy. Songsong ConcretingDocument29 pagesBrgy. Songsong ConcretingRvin Jay Cabontocan Mariano100% (1)
- Mito Food Plan: Fats & Oils ProteinsDocument2 pagesMito Food Plan: Fats & Oils Proteinsd_probst5098No ratings yet
- General Physics 1 Laboratory ManualDocument61 pagesGeneral Physics 1 Laboratory Manualmintimai01No ratings yet
- Minesight Schedule Optimizer - A New Tool: Global Mining Software Solutions Since 1970Document28 pagesMinesight Schedule Optimizer - A New Tool: Global Mining Software Solutions Since 1970Ricardo Contreras BNo ratings yet
- Introduction To Emerging Technologies: Cloud ComputingDocument79 pagesIntroduction To Emerging Technologies: Cloud ComputingCherianXavierNo ratings yet
- Uh - B-Eye-D Uh - Bil-Ih-Tee: Senior NESC-GE 2018 Regional Round Word List Grades 9, 10, 11, 12Document12 pagesUh - B-Eye-D Uh - Bil-Ih-Tee: Senior NESC-GE 2018 Regional Round Word List Grades 9, 10, 11, 12Tiko MakharadzeNo ratings yet
- Z-Bus Building Algorithm: Network Representation 1,2,3,4-Nodes Let 1 Be The Reference Node A, B, C, D, e - ElementsDocument17 pagesZ-Bus Building Algorithm: Network Representation 1,2,3,4-Nodes Let 1 Be The Reference Node A, B, C, D, e - ElementsAsrar Hussain BhatNo ratings yet
- Chapter 8Document29 pagesChapter 8Deivasigamani SubramaniyanNo ratings yet
- Materi Komposit - Prof. Anne ZulfiaDocument59 pagesMateri Komposit - Prof. Anne ZulfiaMuhammad ThohariNo ratings yet
- ToxicantsDocument76 pagesToxicantsAnum KhalidNo ratings yet
- Additive ManufacturingDocument48 pagesAdditive ManufacturingSrinivasaReddyM100% (1)
- HeatPAC Specification (HeatPAC-708)Document2 pagesHeatPAC Specification (HeatPAC-708)Thanh Trung Nguyen PhanNo ratings yet
- HypothesisDocument25 pagesHypothesisShiv SuriNo ratings yet
- CRIM122 Theories of Crime CausationDocument32 pagesCRIM122 Theories of Crime CausationSarah DiazNo ratings yet
- I Applic AMPHDocument1 pageI Applic AMPHLyteC123No ratings yet
- Managing Innovation - Chapter 5Document46 pagesManaging Innovation - Chapter 5jp1234567890No ratings yet
- Blessing of Medals of Sts Benedict and Anthony of PaduaDocument4 pagesBlessing of Medals of Sts Benedict and Anthony of PaduaJuan Jaylou AnteNo ratings yet
- Helium Leak Testing GuideDocument2 pagesHelium Leak Testing Guideabhishek198327100% (1)
- Jaimon Joy CVDocument4 pagesJaimon Joy CVjaimonjoyNo ratings yet
- Permian Basin & Eagle Ford Shale From A Global Perspective - Art Berman 2018Document16 pagesPermian Basin & Eagle Ford Shale From A Global Perspective - Art Berman 2018Cliffhanger100% (1)
- Electrode Consumption PDFDocument1 pageElectrode Consumption PDFharold_bhieNo ratings yet
- Climate Change and Coping Strategies in The Niger DeltaDocument5 pagesClimate Change and Coping Strategies in The Niger DeltaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- MeasurIT Flexim Application Data Sheet FLUXUS 0811Document2 pagesMeasurIT Flexim Application Data Sheet FLUXUS 0811cwiejkowskaNo ratings yet
- Mechanical Drawings: Original InstructionsDocument19 pagesMechanical Drawings: Original InstructionsPedro OliveiraNo ratings yet