Download as pdf or txt
You might also like
- Andrew J. Spieles Plea AgreementDocument11 pagesAndrew J. Spieles Plea AgreementWSETNo ratings yet
- Aeroflot Financial AnalysisDocument14 pagesAeroflot Financial AnalysisrinchinaNo ratings yet
- United States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Document39 pagesUnited States Patent: Barger Et Al. (45) Date of Patent: Jun. 15, 2004Gek CagatanNo ratings yet
- 2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineDocument14 pages2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineCường Nguyễn QuốcNo ratings yet
- United States Patent: LavoisierDocument14 pagesUnited States Patent: LavoisieravalosheNo ratings yet
- Us 9194182Document9 pagesUs 9194182Александр ПравосудовNo ratings yet
- United States Patent (10) Patent No.: US 8,919,272 B2Document10 pagesUnited States Patent (10) Patent No.: US 8,919,272 B263No ratings yet
- US7992581Document17 pagesUS7992581Ragil YogaNo ratings yet
- US7743601Document4 pagesUS7743601Alien GmpNo ratings yet
- US7413145 - ChemtrailsDocument12 pagesUS7413145 - ChemtrailsAlex Supertramp DantasNo ratings yet
- United States Patent (10) Patent No.: US 6,453,528 B1Document9 pagesUnited States Patent (10) Patent No.: US 6,453,528 B1MahnooshNo ratings yet
- United States Patent: Zamirowski Et A1. (10) Patent N0.: (45) Date of PatentDocument29 pagesUnited States Patent: Zamirowski Et A1. (10) Patent N0.: (45) Date of PatentSoma GhoshNo ratings yet
- United States Patent: Norris Et AlDocument10 pagesUnited States Patent: Norris Et Al454No ratings yet
- US8973792Document17 pagesUS8973792Trung Hieu NguyenNo ratings yet
- United States Patent (10) Patent No.: US 9,080,720 B2Document16 pagesUnited States Patent (10) Patent No.: US 9,080,720 B2sfjhsakjfhNo ratings yet
- United States Patent: Robertson Et Al. (45) Date of Patent: Jul. 11, 2017Document17 pagesUnited States Patent: Robertson Et Al. (45) Date of Patent: Jul. 11, 2017gorgiNo ratings yet
- 59 0f1-,-,,é - 1,, M 13,553 $525113ei Iiii?if III Fifit 21811101511121.1118Document22 pages59 0f1-,-,,é - 1,, M 13,553 $525113ei Iiii?if III Fifit 21811101511121.1118Qwerty UiopNo ratings yet
- US10050155Document29 pagesUS10050155ErockNo ratings yet
- Us7997527 PDFDocument11 pagesUs7997527 PDF雷黎明No ratings yet
- United States Patent (10) Patent No.: US 6,575,408 B2: Benney Et Al. (45) Date of Patent: Jun. 10, 2003Document7 pagesUnited States Patent (10) Patent No.: US 6,575,408 B2: Benney Et Al. (45) Date of Patent: Jun. 10, 2003PENANTNo ratings yet
- US7684854B2Document19 pagesUS7684854B2N R RaajanNo ratings yet
- Us6722581 PDFDocument12 pagesUs6722581 PDFshyam_nair555No ratings yet
- United States Patent (10) Patent No.: US 8,961,451 B2Document37 pagesUnited States Patent (10) Patent No.: US 8,961,451 B2Widiya Nur FatinahNo ratings yet
- Patent US6447462Document15 pagesPatent US6447462Yodi SoebadiNo ratings yet
- United States Patent (19) : (45) Date of Patent: Jun. 30, 1998Document8 pagesUnited States Patent (19) : (45) Date of Patent: Jun. 30, 1998mohadeseNo ratings yet
- Silla ElevadoraDocument41 pagesSilla Elevadoraingeniomeca8800No ratings yet
- United States Patent (10) Patent No.: US 8.448,966 B2Document13 pagesUnited States Patent (10) Patent No.: US 8.448,966 B2johnmaxin1114No ratings yet
- Us 6974123Document9 pagesUs 6974123John MccloskeyNo ratings yet
- Unetich USPTO 9050166 Coupling Resonant DiathermyDocument8 pagesUnetich USPTO 9050166 Coupling Resonant DiathermystflockNo ratings yet
- United States Patent: Hughes Et Al. (45) Date of Patent: Aug. 2, 2011Document14 pagesUnited States Patent: Hughes Et Al. (45) Date of Patent: Aug. 2, 2011Daniel ChudNo ratings yet
- United States Patent: (10) Patent No.: US 7,709,730 B2Document30 pagesUnited States Patent: (10) Patent No.: US 7,709,730 B2juanNo ratings yet
- Us 7748384Document28 pagesUs 7748384himanshi413No ratings yet
- 7.3/123,125,129,865,6,146 303,122 122.5 TCE"C. F Rhen. Pontani. LiebDocument7 pages7.3/123,125,129,865,6,146 303,122 122.5 TCE"C. F Rhen. Pontani. LiebNamelezz ShadowwNo ratings yet
- United States Patent (10) Patent No.: US 9,194.231 B2Document6 pagesUnited States Patent (10) Patent No.: US 9,194.231 B2Elizabeth Lecca LujanNo ratings yet
- United States Patent: Cheng Et Al. (10) Patent No.: US 9,078,547 B2Document10 pagesUnited States Patent: Cheng Et Al. (10) Patent No.: US 9,078,547 B2Alex BrcNo ratings yet
- United States Patent (10) Patent No.: US 6,599,476 B1: Watson Et Al. (45) Date of Patent: Jul. 29, 2003Document38 pagesUnited States Patent (10) Patent No.: US 6,599,476 B1: Watson Et Al. (45) Date of Patent: Jul. 29, 2003Jie99No ratings yet
- Stacked Adhesive Optical SensorDocument9 pagesStacked Adhesive Optical SensorVansala GanesanNo ratings yet
- United States Patent: Murphy (45) Date of Patent: Aug. 5, 2014Document15 pagesUnited States Patent: Murphy (45) Date of Patent: Aug. 5, 2014JohnNo ratings yet
- United States Patent: SnawerdtDocument9 pagesUnited States Patent: SnawerdtjsholleyNo ratings yet
- Evergreen International Aerial Delivery System - Patent US7413145 PDFDocument12 pagesEvergreen International Aerial Delivery System - Patent US7413145 PDFJeannie LorraineNo ratings yet
- United States Patent (10) Patent No.: US 7,417,920 B2Document18 pagesUnited States Patent (10) Patent No.: US 7,417,920 B2ruguang zhangNo ratings yet
- United States Patent (10) Patent No.: US 7,134,558 B1: Mimlitch, III Et Al. (45) Date of Patent: Nov. 14, 2006Document22 pagesUnited States Patent (10) Patent No.: US 7,134,558 B1: Mimlitch, III Et Al. (45) Date of Patent: Nov. 14, 2006Erin GokNo ratings yet
- US6435783 - Variable Radius Notching MachineDocument48 pagesUS6435783 - Variable Radius Notching MachineJackie SongNo ratings yet
- United States Patent: GitnesDocument9 pagesUnited States Patent: GitnesrakkaNo ratings yet
- Segmented Bearing BushingDocument12 pagesSegmented Bearing BushingAnonymous 2k25WMLY0No ratings yet
- U.S. Pat, 9,012,750, Crown Top Bar Fret, Stringed Instrument Including Same, and Method of Manufacture, 2015.Document12 pagesU.S. Pat, 9,012,750, Crown Top Bar Fret, Stringed Instrument Including Same, and Method of Manufacture, 2015.Duane BlakeNo ratings yet
- United States Patent: (12) (10) Patent No.: US 6,980,855 B2Document19 pagesUnited States Patent: (12) (10) Patent No.: US 6,980,855 B2pankaj shivhareNo ratings yet
- US9321711Document18 pagesUS9321711Phenol GroupNo ratings yet
- US7727256Document13 pagesUS7727256d3xterNo ratings yet
- Airbus Compound HelicopterDocument15 pagesAirbus Compound Helicopterjorge paezNo ratings yet
- US6585061B2Document8 pagesUS6585061B2ginni koundalNo ratings yet
- AzimuthDocument14 pagesAzimuthAhmed JafarNo ratings yet
- US8950546Document12 pagesUS8950546Jean DelaronciereNo ratings yet
- EARTEMPERATURE MONITOR-patentDocument11 pagesEARTEMPERATURE MONITOR-patentMahmudi P2 Fisika LIPINo ratings yet
- United States Patent: (10) Patent No.: US 8.419,634 B2Document39 pagesUnited States Patent: (10) Patent No.: US 8.419,634 B2Anonymous qqgN8jNo ratings yet
- United States Patent US 6,607,506 B2: (10) Patent No.: Kletschka (45) Date of Patent: Aug. 19, 2003Document40 pagesUnited States Patent US 6,607,506 B2: (10) Patent No.: Kletschka (45) Date of Patent: Aug. 19, 2003RNo ratings yet
- United States Patent: Kinghorn Et Al. Apr. 23, 2002Document7 pagesUnited States Patent: Kinghorn Et Al. Apr. 23, 2002Daniela ScobarNo ratings yet
- Patente IlluminetDocument11 pagesPatente IlluminetAmanda Forero HernándezNo ratings yet
- US8453712Document9 pagesUS8453712Ashkan AsefiNo ratings yet
- Head Up Display Having A Combiner With Wedge Lenses US7570430Document10 pagesHead Up Display Having A Combiner With Wedge Lenses US7570430nameNo ratings yet
- US8221404Document46 pagesUS8221404BhargavNo ratings yet
- Pressure Vessel and Stacks Field Repair ManualFrom EverandPressure Vessel and Stacks Field Repair ManualRating: 4 out of 5 stars4/5 (4)
- Upload 00145155 1630609893446Document11 pagesUpload 00145155 1630609893446mohadese EstajiNo ratings yet
- Zenition Dosewise Whitpaper HRDocument13 pagesZenition Dosewise Whitpaper HRmohadese EstajiNo ratings yet
- Narrative Review-How To Access Nodules: Role of New Technology Including Navi-And Robo-BronchosDocument12 pagesNarrative Review-How To Access Nodules: Role of New Technology Including Navi-And Robo-Bronchosmohadese EstajiNo ratings yet
- U.S. Food & Drug Administration: 10903 New Hampshire Avenue Silver Spring, MD 20993Document16 pagesU.S. Food & Drug Administration: 10903 New Hampshire Avenue Silver Spring, MD 20993mohadese EstajiNo ratings yet
- s1111 C Arm FluoroscopeDocument4 pagess1111 C Arm Fluoroscopemohadese EstajiNo ratings yet
- Regulatory Requirements For Manufacturers of X-Ray Equipment and X-Ray TubesDocument7 pagesRegulatory Requirements For Manufacturers of X-Ray Equipment and X-Ray Tubesmohadese EstajiNo ratings yet
- NHMSFAP As X Ray and Radiation SafetyDocument16 pagesNHMSFAP As X Ray and Radiation Safetymohadese EstajiNo ratings yet
- bfcr152 IrmerDocument66 pagesbfcr152 Irmermohadese EstajiNo ratings yet
- Standards For Diagnostic RadiologyDocument25 pagesStandards For Diagnostic Radiologymohadese EstajiNo ratings yet
- Standardized Methods For Measuring Diagnostic X-Ray ExposuresDocument26 pagesStandardized Methods For Measuring Diagnostic X-Ray Exposuresmohadese EstajiNo ratings yet
- Sptdm-El-Sim-002-2023-EoDocument8 pagesSptdm-El-Sim-002-2023-EoIswaruddine RoslehNo ratings yet
- Special Power of Attorney: Aldwin C - Peque Atty Adrian P. MapaloDocument3 pagesSpecial Power of Attorney: Aldwin C - Peque Atty Adrian P. MapaloAdrian MapaloNo ratings yet
- TP ACM 22 MoistureDocument2 pagesTP ACM 22 MoistureBhupesh MulikNo ratings yet
- Perkembangan Ilmu Pengetahuan Bani Ummayah Eng VerDocument8 pagesPerkembangan Ilmu Pengetahuan Bani Ummayah Eng VerIzzan Nafis AdhyaksaNo ratings yet
- Credit Card Statement Dated 20122019 PDFDocument3 pagesCredit Card Statement Dated 20122019 PDFvivek srivastavaNo ratings yet
- Legal Notice Reply (GV)Document3 pagesLegal Notice Reply (GV)Srijan SinhaNo ratings yet
- Geneva Consensus Declaration On Promoting Women's Health and Strengthening The FamilyDocument5 pagesGeneva Consensus Declaration On Promoting Women's Health and Strengthening The FamilyJBSfanNo ratings yet
- The Use of Trusts and Corporations in Money LaunderingDocument15 pagesThe Use of Trusts and Corporations in Money LaunderingCHITENGI SIPHO JUSTINE, PhD Candidate- Law & PolicyNo ratings yet
- SMT 3 Manajemen Akuntansi - Chap 2Document63 pagesSMT 3 Manajemen Akuntansi - Chap 2AsniNo ratings yet
- Dizon V CTA G.R. No. 140944 April 30, 2008Document11 pagesDizon V CTA G.R. No. 140944 April 30, 2008Emil BautistaNo ratings yet
- ISL 201 Assignment 2 SolutionDocument4 pagesISL 201 Assignment 2 SolutionAleem IqbalNo ratings yet
- Electric Charges and Fields Sub. Test 30th April 2023Document4 pagesElectric Charges and Fields Sub. Test 30th April 2023Rahul pandeyNo ratings yet
- Appellant's BriefDocument13 pagesAppellant's BriefJojo Navarro100% (1)
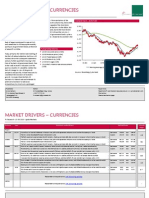
- Market Drivers - Currencies: Today's Comment Today's Chart - EUR/USDDocument5 pagesMarket Drivers - Currencies: Today's Comment Today's Chart - EUR/USDMiir ViirNo ratings yet
- Student Registration For The Academic Year 2022-23: Personal DetailsDocument1 pageStudent Registration For The Academic Year 2022-23: Personal DetailsSMBTAV & SN DC VEERAVASARAMNo ratings yet
- Data Dump Related Properties AlvarezDocument86 pagesData Dump Related Properties AlvarezPanama Tierra RobadaNo ratings yet
- 6 CP NS-01 BD Draft Part 3 Vol.4 EM Version 11.0 FINAL Rev ADocument72 pages6 CP NS-01 BD Draft Part 3 Vol.4 EM Version 11.0 FINAL Rev Asamarendra paridaNo ratings yet
- Workers Participation in ManagementDocument36 pagesWorkers Participation in ManagementADARSH SINGHNo ratings yet
- Overall Result For UDC / DEO (PPS-4)Document7 pagesOverall Result For UDC / DEO (PPS-4)Aziz Mahar ChannarNo ratings yet
- What's in A Name? Refugees', Migrants' and The Politics of LabellingDocument23 pagesWhat's in A Name? Refugees', Migrants' and The Politics of LabellingEduardo TinajeroNo ratings yet
- Lista de Servidores FTPDocument4 pagesLista de Servidores FTPMiguelNo ratings yet
- In Re: Ahmad J. Tukhi, 9th Cir. BAP (2017)Document20 pagesIn Re: Ahmad J. Tukhi, 9th Cir. BAP (2017)Scribd Government DocsNo ratings yet
- Pasadores Del Balde Cat-988kDocument4 pagesPasadores Del Balde Cat-988kRAMON CALDERONNo ratings yet
- Some of Rizal's Cultural Observation During The Travel:: By-Jose-Rizal-Los-ViajesDocument20 pagesSome of Rizal's Cultural Observation During The Travel:: By-Jose-Rizal-Los-ViajesSheena SangalangNo ratings yet
- Tendering Process CVC GuidelineDocument26 pagesTendering Process CVC GuidelineAshish SahayNo ratings yet
- AudirecallDocument3 pagesAudirecallistaknut.otkucaji0aNo ratings yet
- Landlord Tenant Law OutlineDocument6 pagesLandlord Tenant Law OutlineSarah McPherson100% (1)
- Ex 5484Document2 pagesEx 5484Hari Krishnan RNo ratings yet