Download as pdf or txt
You might also like
- Maximum Tune 3 Manual PDFDocument196 pagesMaximum Tune 3 Manual PDFJosh WeirdNo ratings yet
- Curves in SpaceDocument9 pagesCurves in SpaceTeresa Villena GonzálezNo ratings yet
- 1 Week 2회 (2 Week 1회) 10.8 Arc Length and Curvature 수업자료Document47 pages1 Week 2회 (2 Week 1회) 10.8 Arc Length and Curvature 수업자료ლ예No ratings yet
- CurvatureDocument7 pagesCurvatureGaurav DharNo ratings yet
- Day 19Document9 pagesDay 19Groleo MuttNo ratings yet
- Differential Geometry NotesDocument7 pagesDifferential Geometry NotesSanjeev ShuklaNo ratings yet
- Trihedron TNB Frame PDFDocument43 pagesTrihedron TNB Frame PDFAneelaNo ratings yet
- Wang, KaixinDocument13 pagesWang, KaixinsergenNo ratings yet
- 2020 Arfah On Causal Characterization of Spherical Indicatrices of Timelike Curves in Minkowski 3-SpaceDocument12 pages2020 Arfah On Causal Characterization of Spherical Indicatrices of Timelike Curves in Minkowski 3-SpaceEmre ÖztürkNo ratings yet
- Lecture 8Document2 pagesLecture 8ThetaOmegaNo ratings yet
- Lect 10Document29 pagesLect 10itsprime747No ratings yet
- Serret-Frenet FormulasDocument6 pagesSerret-Frenet Formulasindula123No ratings yet
- Isom PDFDocument4 pagesIsom PDFFree freeNo ratings yet
- Vector FunctionsDocument93 pagesVector FunctionsResty BalinasNo ratings yet
- Application of Calculus, B.SC, Notes On Arc LengthDocument4 pagesApplication of Calculus, B.SC, Notes On Arc Lengthkishalay sarkarNo ratings yet
- Unit Normal VectorDocument0 pagesUnit Normal VectorgusgifNo ratings yet
- Curves in Four-Dimensional Space (Lee Mun Yew) PDFDocument16 pagesCurves in Four-Dimensional Space (Lee Mun Yew) PDFgabrielNo ratings yet
- Test 123Document7 pagesTest 123Shah KhanNo ratings yet
- Curves Do Carmo NotesDocument7 pagesCurves Do Carmo NotesDharil ShahNo ratings yet
- 13.3 Arc Length and CurvatureDocument5 pages13.3 Arc Length and CurvatureborrellanoNo ratings yet
- The Calculus of Functions Of: Section 2.3 Motion Along A CurveDocument14 pagesThe Calculus of Functions Of: Section 2.3 Motion Along A CurveKimberly Pascual VicmudoNo ratings yet
- Vector Calculus in Two DimensionsDocument27 pagesVector Calculus in Two DimensionsAndreea MoldoveanuNo ratings yet
- Week 2: Elementary Calculus of Vector Functions and CurvesDocument10 pagesWeek 2: Elementary Calculus of Vector Functions and CurvesTeresa Villena GonzálezNo ratings yet
- D G Chapter 3Document13 pagesD G Chapter 3Tayyaba AfzalNo ratings yet
- FrenetDocument6 pagesFrenetsaaedkhalidNo ratings yet
- I Some TriesDocument6 pagesI Some TriesFree freeNo ratings yet
- Typeset by AMS-TEX 1Document6 pagesTypeset by AMS-TEX 1Satish MishraNo ratings yet
- Curvature of A CurveDocument3 pagesCurvature of A Curvekumar_yogesh223881No ratings yet
- 06gm CurvesDocument11 pages06gm CurvesRajesh MahapatraNo ratings yet
- Calculo Vetorial (Simples e Bom)Document36 pagesCalculo Vetorial (Simples e Bom)joaoNo ratings yet
- Chapter 2. Parameterized Curves in RDocument25 pagesChapter 2. Parameterized Curves in RAdelin VătăşescuNo ratings yet
- Appendix PDFDocument51 pagesAppendix PDFAnonymous Gd16J3n7No ratings yet
- Vector Calculus Note-1bDocument8 pagesVector Calculus Note-1bKami KazeNo ratings yet
- ch10 RotacaoDocument18 pagesch10 RotacaoJosé SearaNo ratings yet
- Calculus 3Document2 pagesCalculus 3simbachipsyNo ratings yet
- PDF Radius of Curvature CompressDocument7 pagesPDF Radius of Curvature CompressSollutions for techNo ratings yet
- Math 112. Elementary Functions. Chapter 4. Trigonometric Functions. 4.1 Angles and Radian MeasureDocument13 pagesMath 112. Elementary Functions. Chapter 4. Trigonometric Functions. 4.1 Angles and Radian MeasureEdcel CincoNo ratings yet
- Arbitrary Speed CurveDocument7 pagesArbitrary Speed CurveMahmoud MrowiNo ratings yet
- Math 132, Lecture 1: Trigonometry: 1 The Circular Functions: Definitions of Sine and CosineDocument112 pagesMath 132, Lecture 1: Trigonometry: 1 The Circular Functions: Definitions of Sine and Cosinesouvikbesu89No ratings yet
- DiffgeoDocument20 pagesDiffgeoMANIRAGUHA Jean PaulNo ratings yet
- Ena Lec 01Document15 pagesEna Lec 01ARSLAN HAIDERNo ratings yet
- Differential Geometry of Curves and Surfaces 2. Curves in SpaceDocument13 pagesDifferential Geometry of Curves and Surfaces 2. Curves in SpaceTalha AzanNo ratings yet
- Localized Feature ExtractionDocument15 pagesLocalized Feature ExtractionManu ManuNo ratings yet
- Curves: Length, Tangent and Normal Vector, Curvature: Par OrthDocument2 pagesCurves: Length, Tangent and Normal Vector, Curvature: Par OrthKeith GarridoNo ratings yet
- The Method of Animation: 1 A Short Refresher On Projective CoordinatesDocument9 pagesThe Method of Animation: 1 A Short Refresher On Projective CoordinatesJoydip Saha100% (1)
- Parametric CurvesDocument8 pagesParametric Curvessiva_ksrNo ratings yet
- Scalar and Vector FieldsDocument65 pagesScalar and Vector FieldsVipul JoshiNo ratings yet
- Chapter 14 Vector Functions Et Chapter 13Document1 pageChapter 14 Vector Functions Et Chapter 13Vendedor OnlineNo ratings yet
- Pre-Calculus / Math Notes (Unit 9 of 22)Document17 pagesPre-Calculus / Math Notes (Unit 9 of 22)OmegaUserNo ratings yet
- 502.gaussian GeometryDocument71 pages502.gaussian GeometrycarlomettaNo ratings yet
- BEF 25903 - Kinematics of Translating and Rotating BodiesDocument52 pagesBEF 25903 - Kinematics of Translating and Rotating BodiesFikri MarjiNo ratings yet
- MATH 4A - Linear Algebra With Applications: Lecture 12: Determinants, Inverses and VolumeDocument21 pagesMATH 4A - Linear Algebra With Applications: Lecture 12: Determinants, Inverses and VolumeakshayNo ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Pedals, Autoroulettes and Steiner'S Theorem Momcilo Bjelica 1. Pedals and Steiner's TheoremDocument4 pagesPedals, Autoroulettes and Steiner'S Theorem Momcilo Bjelica 1. Pedals and Steiner's TheoremLeo KutsNo ratings yet
- Lecture Notes 7: 1.17 The Frenet-Serret Frame and TorsionDocument5 pagesLecture Notes 7: 1.17 The Frenet-Serret Frame and TorsionSanjeev ShuklaNo ratings yet
- Ts 4 SolnDocument5 pagesTs 4 SolnKelloggNo ratings yet
- S Domain AnalysisDocument9 pagesS Domain Analysisfaisal140No ratings yet
- Cycloid 2022Document15 pagesCycloid 2022MaNo ratings yet
- Linear Algebra: Lecture 5: Linear Transformations and MatricesDocument29 pagesLinear Algebra: Lecture 5: Linear Transformations and MatricesAdrianMirzaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- IntegrationDocument140 pagesIntegrationTeresa Villena GonzálezNo ratings yet
- COWDocument22 pagesCOWTeresa Villena GonzálezNo ratings yet
- Arnold HuygensBarrow NewtonHookeDocument123 pagesArnold HuygensBarrow NewtonHookeTeresa Villena GonzálezNo ratings yet
- Variations of The Sliding Ladder Problem: Stelios Kapranidis (Steliok@usca - Edu) Has A Ph.D. andDocument6 pagesVariations of The Sliding Ladder Problem: Stelios Kapranidis (Steliok@usca - Edu) Has A Ph.D. andTeresa Villena GonzálezNo ratings yet
- Week 2: Elementary Calculus of Vector Functions and CurvesDocument10 pagesWeek 2: Elementary Calculus of Vector Functions and CurvesTeresa Villena GonzálezNo ratings yet
- Moments in Mathematics Complete BookDocument130 pagesMoments in Mathematics Complete BookTeresa Villena GonzálezNo ratings yet
- Week 6: Integration: Cartesian CoordinatesDocument10 pagesWeek 6: Integration: Cartesian CoordinatesTeresa Villena GonzálezNo ratings yet
- Part Iii: Functions From R TorDocument14 pagesPart Iii: Functions From R TorTeresa Villena GonzálezNo ratings yet
- Calculus Book IDocument19 pagesCalculus Book ITeresa Villena GonzálezNo ratings yet
- FulghumDocument90 pagesFulghumTeresa Villena GonzálezNo ratings yet
- Partial DerivativesDocument13 pagesPartial DerivativesTeresa Villena GonzálezNo ratings yet
- All The Mathematics You MissedDocument376 pagesAll The Mathematics You Misseddany3220100% (5)
- 12 Audiometic TestingDocument99 pages12 Audiometic TestingAashish SinghNo ratings yet
- 12 Physics Prep QP 21Document14 pages12 Physics Prep QP 21alichaudaryNo ratings yet
- R V Churchill Operational Mathematics 2nd Ed Mcgraw Hill Book Co New York 1958 306 PP 41sDocument2 pagesR V Churchill Operational Mathematics 2nd Ed Mcgraw Hill Book Co New York 1958 306 PP 41skkr.nitpyNo ratings yet
- LED Transit Colorlight Signal Modules: 5.5 Inch (140 MM) - 12V DCDocument2 pagesLED Transit Colorlight Signal Modules: 5.5 Inch (140 MM) - 12V DCMarcos Gualberto De Jesus GalvãoNo ratings yet
- Prilepko SolutionDocument37 pagesPrilepko Solutionmukteshwarj4No ratings yet
- Porous Medium: S H G A Q KDocument25 pagesPorous Medium: S H G A Q KMohammed AzeezNo ratings yet
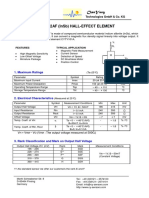
- Cysh12Af (Insb) Hall-Effect Element: 1. Maximum RatingsDocument6 pagesCysh12Af (Insb) Hall-Effect Element: 1. Maximum RatingsbabazadeNo ratings yet
- E1-Conduction Heat TransferDocument11 pagesE1-Conduction Heat TransferIfwat Haiyee0% (1)
- CO2 Sensor Module - SE8000 Series Room Controller - Installation SheetDocument4 pagesCO2 Sensor Module - SE8000 Series Room Controller - Installation SheetRaul CARRASQUERO DIAZNo ratings yet
- 15570Document6 pages15570JhoNo ratings yet
- Advances of Machine Learning in Materials Science: Ideas and TechniquesDocument40 pagesAdvances of Machine Learning in Materials Science: Ideas and TechniquesdaniloNo ratings yet
- SSC Mock Test - 10: (Solution)Document12 pagesSSC Mock Test - 10: (Solution)raviNo ratings yet
- Slides 4 - Internal StressDocument12 pagesSlides 4 - Internal StressMarceloNo ratings yet
- V1-07 Kloeckner Westok A5 Pocket Guide Jun 2020Document36 pagesV1-07 Kloeckner Westok A5 Pocket Guide Jun 2020vomawew647No ratings yet
- 10 16984-Saufenbilder 1138590-2517964Document17 pages10 16984-Saufenbilder 1138590-2517964Moez BellamineNo ratings yet
- Soil CompactionDocument37 pagesSoil CompactionYsabelle Tagaruma100% (1)
- EAS 430: Petroleum Geology: Lab 2: Interpreting Geophysical Well LogsDocument30 pagesEAS 430: Petroleum Geology: Lab 2: Interpreting Geophysical Well Logskhan.pakiNo ratings yet
- 1 3343hs652c24 PDFDocument1 page1 3343hs652c24 PDFmarko9292No ratings yet
- Equation SheetsDocument2 pagesEquation Sheetsya OuNo ratings yet
- Multi Loop Circuits StudentDocument3 pagesMulti Loop Circuits StudentSai kartikNo ratings yet
- Manual Yaskawa 315/v7Document162 pagesManual Yaskawa 315/v7Ernesto Segura100% (2)
- Carrier 50ff PDFDocument96 pagesCarrier 50ff PDFfaraz siddiquiNo ratings yet
- Worksheet 2Document5 pagesWorksheet 2Devansh AgarwalNo ratings yet
- Marking Scheme Class: Xii Session: 2021-22 Mathematics (Code-041) Term - 2 Section - ADocument7 pagesMarking Scheme Class: Xii Session: 2021-22 Mathematics (Code-041) Term - 2 Section - AVikash MalhotraNo ratings yet
- Cambridge IGCSE: MATHEMATICS 0580/22Document12 pagesCambridge IGCSE: MATHEMATICS 0580/22saharNo ratings yet
- KV of BitumenDocument10 pagesKV of Bitumendhanesh kumarNo ratings yet
- Herstein: Topics in Algebra - Subgroups and A Counting PrincipleDocument2 pagesHerstein: Topics in Algebra - Subgroups and A Counting Principleul trNo ratings yet
- 2022 June P-2 QPDocument18 pages2022 June P-2 QPAethrendil ValinorNo ratings yet
- Engineering Physics S K GuptaDocument5 pagesEngineering Physics S K GuptaDark0% (1)