Download as pdf or txt
You might also like
- SPSS Statistics - 210303Document25 pagesSPSS Statistics - 210303Ana Maria Parra100% (1)
- Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace and Virtual RealityFrom EverandQuaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace and Virtual RealityNo ratings yet
- Lab Report Spot Speed StudyDocument6 pagesLab Report Spot Speed StudymanNo ratings yet
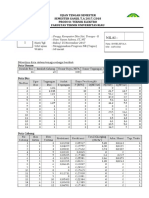
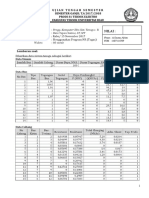
- Al Imam Akbar UTS at HomeDocument6 pagesAl Imam Akbar UTS at HomeDaniel Sevala 1407112344No ratings yet
- DC ServoDocument11 pagesDC ServojeevanNo ratings yet
- CIV 4013-Assignment 2010Document8 pagesCIV 4013-Assignment 2010Virtual RealityNo ratings yet
- 2020ceb005 - Potnuru SaideepakDocument14 pages2020ceb005 - Potnuru Saideepak2020CEB005 POTNURUSAIDEEPAKNo ratings yet
- Solucionario - Tovar Soto RobinsonDocument11 pagesSolucionario - Tovar Soto RobinsonEnrique CarhuamacaNo ratings yet
- Performance Test Results of Modified Bio-Asphalt.: Table 7Document1 pagePerformance Test Results of Modified Bio-Asphalt.: Table 7dazulu18No ratings yet
- Reference DocumentsDocument12 pagesReference DocumentsSINU0607IITEEENo ratings yet
- DC Modular Servo SystemDocument9 pagesDC Modular Servo Systemanirbansingha345No ratings yet
- TechBuilder - MPPT CALCULATORDocument6 pagesTechBuilder - MPPT CALCULATORBabumani MandiNo ratings yet
- CL351: Chemical Engineering Lab-II Semester 1, 2014-2015 IIT GandhinagarDocument6 pagesCL351: Chemical Engineering Lab-II Semester 1, 2014-2015 IIT GandhinagarPradeep DiwakarNo ratings yet
- Grade/Tonne: Blockmodel: Project - Block - Model - Geologico - BMF Region: All Categ 2Document7 pagesGrade/Tonne: Blockmodel: Project - Block - Model - Geologico - BMF Region: All Categ 2Aaron kempNo ratings yet
- Series Aluminium Housing Three-Phase Multi-Mount Asynchronous MotorDocument4 pagesSeries Aluminium Housing Three-Phase Multi-Mount Asynchronous MotorHusi NihaNo ratings yet
- Rain Water Basin DesignDocument11 pagesRain Water Basin DesignSturza AnastasiaNo ratings yet
- Test Civ4103-2012-2013-SolutionDocument6 pagesTest Civ4103-2012-2013-SolutionVirtual RealityNo ratings yet
- Final Water WayDocument8 pagesFinal Water Wayabu bakkarNo ratings yet
- Malaci ColDesDocument57 pagesMalaci ColDesokechukwu1benjaminNo ratings yet
- Solved Example Using Ordinary Method of SlicesDocument3 pagesSolved Example Using Ordinary Method of Slicesmohamedashry993No ratings yet
- GTP - Eff 1 Endura SeriesDocument11 pagesGTP - Eff 1 Endura SeriesNaveen GuptaNo ratings yet
- Lab Session 1: Uniform Motion: Name: Neil Yvann N. Aquino Block: BSME 1A Score: DateDocument14 pagesLab Session 1: Uniform Motion: Name: Neil Yvann N. Aquino Block: BSME 1A Score: DateNeil AquinoNo ratings yet
- Especrtral DistorsionDocument4 pagesEspecrtral DistorsionjoelNo ratings yet
- Fatigue Calculations 2107-08Document7 pagesFatigue Calculations 2107-08IsmailNassarNo ratings yet
- Task 1Document4 pagesTask 1ulageswaran.kishokumarNo ratings yet
- Lab ReportDocument8 pagesLab ReportDaniel InemughaNo ratings yet
- Column AnalysisDocument13 pagesColumn AnalysislauropaniergoNo ratings yet
- Al Imam Akbar UTS at HomeDocument6 pagesAl Imam Akbar UTS at HomeDaniel Sevala 1407112344No ratings yet
- Bateria GP1272F2 12-7ahDocument1 pageBateria GP1272F2 12-7ahVentas Prime TelecomNo ratings yet
- Torsional Vibration Spread SheetDocument14 pagesTorsional Vibration Spread SheetRPDeshNo ratings yet
- Model FeaturesDocument12 pagesModel FeaturessandraNo ratings yet
- Estudio Ryr PromediosDocument20 pagesEstudio Ryr Promediosmartin gomezNo ratings yet
- E 3.05E+01 3,532,921,654 1,221,044,674 fctm 2.60 37.87 Cracked β 1.00 17.40 L 8.00 X/l Moment ζ α I I M PDocument2 pagesE 3.05E+01 3,532,921,654 1,221,044,674 fctm 2.60 37.87 Cracked β 1.00 17.40 L 8.00 X/l Moment ζ α I I M PAbel BerhanmeskelNo ratings yet
- CSB HR1221 - Hoja de DatosDocument1 pageCSB HR1221 - Hoja de DatosGermanYPNo ratings yet
- Random Rubble MasonryDocument41 pagesRandom Rubble MasonrymanndooNo ratings yet
- Interpolasi 1 6.033191 Interpolasi 8.263945354Document2 pagesInterpolasi 1 6.033191 Interpolasi 8.263945354sasiNo ratings yet
- P10 LMF2Document7 pagesP10 LMF2Kevin Rivera GarciaNo ratings yet
- E TM T A I A I 2: Cukup Ganti Saja Yang Biru, Nda Usah Mi Lagi Tanya!!!Document24 pagesE TM T A I A I 2: Cukup Ganti Saja Yang Biru, Nda Usah Mi Lagi Tanya!!!Zhiril ZyahputraNo ratings yet
- Wind Load Is 875Document21 pagesWind Load Is 875kedar sabharanjakNo ratings yet
- Percobaan MatDocument4 pagesPercobaan MatFeliza KarinNo ratings yet
- Individual Submission - 14338026Document7 pagesIndividual Submission - 14338026ulageswaran.kishokumarNo ratings yet
- Tutorial 2 - Model AnswerDocument5 pagesTutorial 2 - Model AnswertruekataraNo ratings yet
- Bat CSB 1221W 12V 5ahDocument1 pageBat CSB 1221W 12V 5ahYamilka MedranoNo ratings yet
- Tutorial 4 - Model AnswerDocument6 pagesTutorial 4 - Model AnswertruekataraNo ratings yet
- Example Speed and Delay StudyDocument6 pagesExample Speed and Delay StudySuman MondalNo ratings yet
- PA CT Notes-1Document25 pagesPA CT Notes-1Debjani MudiNo ratings yet
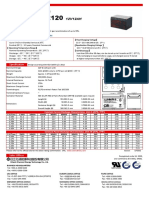
- Bateria CBS 12120Document1 pageBateria CBS 12120Edwin GallegosNo ratings yet
- Ranch 2Document3 pagesRanch 2ELNo ratings yet
- By Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurDocument15 pagesBy Samik Dutta, Somnath Chatterjee, Ranjan Sen CMERI DurgapurSamik DuttaNo ratings yet
- Precast Concrete Block Egg-Shaped Drain (Pcbesd) : SY PerundingDocument4 pagesPrecast Concrete Block Egg-Shaped Drain (Pcbesd) : SY PerundingGan Chin PhangNo ratings yet
- Wind Power Homework - Problem 1 PDFDocument3 pagesWind Power Homework - Problem 1 PDFstellacfierce_243120No ratings yet
- 17-01-2024 - SR - Super60 - Elite, Target & LIIT-BTs - Jee-Main-GTM-13 - KEY & Sol'SDocument19 pages17-01-2024 - SR - Super60 - Elite, Target & LIIT-BTs - Jee-Main-GTM-13 - KEY & Sol'Szaid khanNo ratings yet
- Specification: Constant Current Discharge Characteristics Unit:A (25, 77)Document2 pagesSpecification: Constant Current Discharge Characteristics Unit:A (25, 77)Dhani DmjNo ratings yet
- Zb19kce TFDDocument15 pagesZb19kce TFDfrio industrialNo ratings yet
- Ficha Tecnica HR1234WDocument1 pageFicha Tecnica HR1234WMatías RomeroNo ratings yet
- Speed For Semi High Speed TrainsDocument35 pagesSpeed For Semi High Speed TrainsKRDCL Camp Office ErnakulamNo ratings yet
- Rail Track Curve CalculationsDocument23 pagesRail Track Curve CalculationsKRDCL Camp Office ErnakulamNo ratings yet
- Untitled 2Document1 pageUntitled 2hakafer721No ratings yet
- Equivalent Current Ieq (Secondary Amps)Document4 pagesEquivalent Current Ieq (Secondary Amps)tajudeenNo ratings yet
- HRL1234WDocument1 pageHRL1234WDaniel Porto RodriguesNo ratings yet
- ME513VehicleDynamics LectureSlides 2021Document885 pagesME513VehicleDynamics LectureSlides 2021Metehan AydoğanNo ratings yet
- Question and Answer Sheet: Sinav Soru Ve Cevap KağidiDocument3 pagesQuestion and Answer Sheet: Sinav Soru Ve Cevap KağidiMetehan AydoğanNo ratings yet
- Mak537 CH4Document59 pagesMak537 CH4Metehan AydoğanNo ratings yet
- Mak537 CH3Document70 pagesMak537 CH3Metehan AydoğanNo ratings yet
- Question and Answer Sheet: Sinav Soru Ve Cevap KağidiDocument4 pagesQuestion and Answer Sheet: Sinav Soru Ve Cevap KağidiMetehan AydoğanNo ratings yet
- RLT Optimized Software SystemDocument16 pagesRLT Optimized Software SystemAnalyticNo ratings yet
- Class X NCERT Important QuestionsDocument22 pagesClass X NCERT Important Questionsdeepanshujadon28No ratings yet
- Basic Aircraft Maintenance Training - Aviation Physics Training Course - EASA Part-66 - EASA PART-147 - FL Technics TrainingDocument4 pagesBasic Aircraft Maintenance Training - Aviation Physics Training Course - EASA Part-66 - EASA PART-147 - FL Technics TrainingPhil ZimbNo ratings yet
- 40 Solved Mcqs of Sta630 Research MethodsDocument15 pages40 Solved Mcqs of Sta630 Research Methodsmc1804018770% (1)
- Convex Hull: Jarvis's AlgorithmDocument21 pagesConvex Hull: Jarvis's Algorithmayush jainNo ratings yet
- Cien 3053 - Elementary Surveying: PacingDocument6 pagesCien 3053 - Elementary Surveying: PacingChrisAlmerRamosNo ratings yet
- 51 Solaris Dev Day DTrace060522Document126 pages51 Solaris Dev Day DTrace060522gabjonesNo ratings yet
- Points, Lines, Planes WorksheetDocument4 pagesPoints, Lines, Planes WorksheetKeiver TorresNo ratings yet
- Curves and Surfaces (MA3152) : DR J. M Inroy, Adapted From Lecture Notes by DR K. LeschkeDocument90 pagesCurves and Surfaces (MA3152) : DR J. M Inroy, Adapted From Lecture Notes by DR K. LeschkeDanut StanciuNo ratings yet
- UT Dallas Syllabus For Math1326.501.09s Taught by Cyrus Malek (Sirous)Document7 pagesUT Dallas Syllabus For Math1326.501.09s Taught by Cyrus Malek (Sirous)UT Dallas Provost's Technology GroupNo ratings yet
- Step Up Math 7 Integer8Document1 pageStep Up Math 7 Integer8zfrlNo ratings yet
- IOPDocument22 pagesIOPAdrian ZeetwoNo ratings yet
- Difference Between Descriptive and Inferential StatisticsDocument8 pagesDifference Between Descriptive and Inferential StatisticsKasthuri LetchumanNo ratings yet
- Sustainability 12 06687 v2Document23 pagesSustainability 12 06687 v2Filmon TNo ratings yet
- CH 4 Determinants Multiple Choice Questions (With Answers)Document4 pagesCH 4 Determinants Multiple Choice Questions (With Answers)CRPF School100% (1)
- Governor'S Hills Science SchoolDocument3 pagesGovernor'S Hills Science SchoolAriane Rosan Bocalan Ausmolo-DionisioNo ratings yet
- Interview PDFDocument100 pagesInterview PDFDespicable ProgrammerNo ratings yet
- 8.carried Traffic Is The Volume of Traffic ActuallyDocument2 pages8.carried Traffic Is The Volume of Traffic ActuallyAgung HaryantoNo ratings yet
- Experimental Assessment of Surface Integrity of Inconel-825 in Wire-EdmDocument21 pagesExperimental Assessment of Surface Integrity of Inconel-825 in Wire-EdmNitesh TiwariNo ratings yet
- SalidaDocument47 pagesSalidaAriadna Sánchez CastilloNo ratings yet
- Assignment, PT, QM, 16-17Document3 pagesAssignment, PT, QM, 16-17Prem D'souzaNo ratings yet
- 17695-Article Text-53627-1-10-20170818Document7 pages17695-Article Text-53627-1-10-20170818khansyaNo ratings yet
- Biology Baseline Test Analysis SpreadsheetDocument43 pagesBiology Baseline Test Analysis SpreadsheetMasr RedaNo ratings yet
- Ashrae-D-86527 1Document3 pagesAshrae-D-86527 1rsahaNo ratings yet
- Principle Little's LawDocument3 pagesPrinciple Little's LawSaravana VigneshNo ratings yet
- Important Questions Unit 1,2Document7 pagesImportant Questions Unit 1,2rajeswariNo ratings yet
- Applied Mathematics Thesis IdeasDocument4 pagesApplied Mathematics Thesis Ideasafbteyrma100% (2)
- Audio Cover Song Identification Using Convolutional Neural NetworkDocument5 pagesAudio Cover Song Identification Using Convolutional Neural NetworkNeel KothariNo ratings yet
- Asal Sayılar Matematikteki en Gizemli RakamlarDocument291 pagesAsal Sayılar Matematikteki en Gizemli RakamlarMaji ReyhanNo ratings yet