Download as docx, pdf, or txt
You might also like
- Project ReportDocument53 pagesProject Reportmeenakshig_6No ratings yet
- Design of A 4-Way Passive Cross-Over Network - 0 PDFDocument100 pagesDesign of A 4-Way Passive Cross-Over Network - 0 PDFBrandy ThomasNo ratings yet
- Excelente - MATLAB - Design, Modeling and Evaluation of Protective Relays For Power Systems PDFDocument316 pagesExcelente - MATLAB - Design, Modeling and Evaluation of Protective Relays For Power Systems PDFJosé Rubens Macedo JuniorNo ratings yet
- 1015 To Hastelloy VickoDocument14 pages1015 To Hastelloy Vickovgestantyo100% (1)
- Characterization and Customization of Customized Gas SensorDocument63 pagesCharacterization and Customization of Customized Gas SensorMati ur rahman khanNo ratings yet
- BTP Report 1Document46 pagesBTP Report 1mani harshaNo ratings yet
- LakeDocument110 pagesLakeRamadanNo ratings yet
- Youssef DellyDocument86 pagesYoussef DellyYou BgNo ratings yet
- Performance of WifiDocument78 pagesPerformance of WifiAr ArosNo ratings yet
- Wen Wen 2021 ThesisDocument114 pagesWen Wen 2021 ThesisNick GinoNo ratings yet
- Shadow Phone and Ghost SIM: A Step Toward Geolocation Anonymous CallingDocument59 pagesShadow Phone and Ghost SIM: A Step Toward Geolocation Anonymous Callinglb100% (2)
- Keywords: RTL Verification, Cache, UVM, OOP, TestbenchDocument111 pagesKeywords: RTL Verification, Cache, UVM, OOP, TestbenchTien NguyenNo ratings yet
- UVM Verification of An I2C Master Core PDFDocument144 pagesUVM Verification of An I2C Master Core PDFAtul100% (1)
- Final Thesis ReportDocument65 pagesFinal Thesis ReportSakibHasanNo ratings yet
- Development of a coal wagon monitoring and control systemDocument169 pagesDevelopment of a coal wagon monitoring and control systema.h.shamdaniNo ratings yet
- Sock A Lingum Pipeline AdcDocument78 pagesSock A Lingum Pipeline Adckothari_rubinNo ratings yet
- Halbedel Horia Virtualization of Communication System and Memory Stacks in An Automotive ProjectDocument48 pagesHalbedel Horia Virtualization of Communication System and Memory Stacks in An Automotive ProjectHoria HalbedelNo ratings yet
- UVM Verification of A Floating Point Multiplier - Nicolas J Marsaw - ThesisDocument84 pagesUVM Verification of A Floating Point Multiplier - Nicolas J Marsaw - ThesisSam HoneyNo ratings yet
- Drillbotics NTNU TK Thesis 2021Document84 pagesDrillbotics NTNU TK Thesis 2021Alexandre NkitNo ratings yet
- Senior Design I DocumentationDocument138 pagesSenior Design I DocumentationAnonymous 0Jy86kNo ratings yet
- Mannar Mannan PallaviDocument76 pagesMannar Mannan PallavisomroNo ratings yet
- Thesis 70602Document96 pagesThesis 70602Kouriba AhmedNo ratings yet
- AkramHouraniThesisV3.1 201610518 PDFDocument295 pagesAkramHouraniThesisV3.1 201610518 PDFmusawar420No ratings yet
- Ads 1256 ProjectDocument143 pagesAds 1256 ProjectVikrant SharmaNo ratings yet
- Sample Project ReportDocument49 pagesSample Project ReportSakura ToshakaNo ratings yet
- QưefasdvaDocument39 pagesQưefasdvaDuc AnhNo ratings yet
- I001256219 ThesisDocument71 pagesI001256219 ThesisaliramezanidehajNo ratings yet
- Danny Yoo ThesisDocument108 pagesDanny Yoo ThesisKarthikeyan GunasekaranNo ratings yet
- Project AssistantDocument30 pagesProject AssistantmahaNo ratings yet
- Ultra-Low Power SAR-ADC in 28nm CMOS TECHDocument86 pagesUltra-Low Power SAR-ADC in 28nm CMOS TECHVishnuGundaNo ratings yet
- Real European Low Voltage Test Network For Smart Grid ApplicationsDocument100 pagesReal European Low Voltage Test Network For Smart Grid ApplicationsDavid Jose Poma GuillenNo ratings yet
- Hardw360665-Hardware-Reference-Enare Reference enDocument54 pagesHardw360665-Hardware-Reference-Enare Reference enVahid MehrabiNo ratings yet
- Djeon 1Document118 pagesDjeon 1Gomez LauraNo ratings yet
- EMF2181IB ModemCAN v3-0 ENDocument83 pagesEMF2181IB ModemCAN v3-0 ENLim JasonNo ratings yet
- Springerbriefs in Electrical and Computer Engineering: For Further VolumesDocument93 pagesSpringerbriefs in Electrical and Computer Engineering: For Further VolumesfrancisNo ratings yet
- Root DetectDocument72 pagesRoot DetectArvinder SinglaNo ratings yet
- Tese Diogo CoutinhoDocument99 pagesTese Diogo CoutinhoRaja SolaimalaiNo ratings yet
- MSC Full DissertationDocument86 pagesMSC Full Dissertationprivate 2No ratings yet
- Industrial Networks Connecting Controllers Via OPC: Master's ThesisDocument93 pagesIndustrial Networks Connecting Controllers Via OPC: Master's ThesisRaj ChavanNo ratings yet
- An Articulated Robotic ArmDocument74 pagesAn Articulated Robotic ArmVishwajit Nandi100% (1)
- Escholarship UC Item 52d5d9dfDocument81 pagesEscholarship UC Item 52d5d9dfPancho BvNo ratings yet
- Dissertacao Alexandre MEEC 78514Document92 pagesDissertacao Alexandre MEEC 78514Paulo Sérgio RodriguesNo ratings yet
- Automatic License Plate Recognition Using Deep Learning TechniquesDocument96 pagesAutomatic License Plate Recognition Using Deep Learning TechniquesAnh TuanNo ratings yet
- Forcella ThesisDocument90 pagesForcella ThesisjosecarlosvjNo ratings yet
- Wireless Sensor Network Software Design RulesDocument175 pagesWireless Sensor Network Software Design RulesDSKNo ratings yet
- Kong 010505482Document197 pagesKong 010505482Srinivas VCENo ratings yet
- Ali ThesisDocument125 pagesAli ThesiskavadirajeshNo ratings yet
- Redes - Capa FisicaDocument76 pagesRedes - Capa FisicamartinrelayerNo ratings yet
- E84aycib Interbus Mci Module v4-0 enDocument75 pagesE84aycib Interbus Mci Module v4-0 enLim JasonNo ratings yet
- 2112 Verkler CircuitDebuggingSimulatorDocument184 pages2112 Verkler CircuitDebuggingSimulatorKabil MNo ratings yet
- ST-01-976-1 (CB006381) 2Document105 pagesST-01-976-1 (CB006381) 2Jimmy CyrusNo ratings yet
- Emf2178ib Canopen Aif Module v3-0 enDocument154 pagesEmf2178ib Canopen Aif Module v3-0 enKS LaiNo ratings yet
- Gr29rapport2021 02Document50 pagesGr29rapport2021 02Ibrahim NshimiyimanaNo ratings yet
- TCPstack Embedded SystemDocument98 pagesTCPstack Embedded SystemMuneeb AhmadNo ratings yet
- LENCE 8400 PROTEC ManualDocument198 pagesLENCE 8400 PROTEC ManualTomislav LoinaNo ratings yet
- Mobile Drive: Hardware ManualDocument76 pagesMobile Drive: Hardware ManualYolo SwagNo ratings yet
- Traffic Light Management SystemDocument30 pagesTraffic Light Management SystemPurva new HambireNo ratings yet
- Programming Arduino: Getting Started with SketchesFrom EverandProgramming Arduino: Getting Started with SketchesRating: 3.5 out of 5 stars3.5/5 (5)
- 2017-GCWUF-3350 SUMAIRA SAIF (Roll# 189) Final Assignment (1) Inorganic ChemistDocument5 pages2017-GCWUF-3350 SUMAIRA SAIF (Roll# 189) Final Assignment (1) Inorganic ChemistSumaira SaifNo ratings yet
- Generation of High D.C. Voltages & AC VoltagesDocument14 pagesGeneration of High D.C. Voltages & AC VoltagesSumaira SaifNo ratings yet
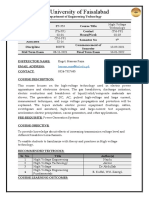
- He University of Faisalabad: Hassan - Razatuf.edu - PKDocument4 pagesHe University of Faisalabad: Hassan - Razatuf.edu - PKSumaira SaifNo ratings yet
- Breakdown of Solid Dielectrics in PracticeDocument17 pagesBreakdown of Solid Dielectrics in PracticeSumaira SaifNo ratings yet
- Unit-Iv - Ac-Measurements & Measurement of High D.C., A.C. and Impulse CurrentsDocument39 pagesUnit-Iv - Ac-Measurements & Measurement of High D.C., A.C. and Impulse CurrentsSumaira SaifNo ratings yet
- Measurement of High D.C., A.C. and Impulse CurrentsDocument18 pagesMeasurement of High D.C., A.C. and Impulse CurrentsSumaira SaifNo ratings yet
- Measurement of High A.C. and Impulse VoltagesDocument24 pagesMeasurement of High A.C. and Impulse VoltagesSumaira SaifNo ratings yet
- He University of Faisalabad: Hassan - Raza@tuf - Edu.pkDocument4 pagesHe University of Faisalabad: Hassan - Raza@tuf - Edu.pkSumaira SaifNo ratings yet
- Conduction and Breakdown in Pure & Commercial LiquidsDocument10 pagesConduction and Breakdown in Pure & Commercial LiquidsSumaira SaifNo ratings yet
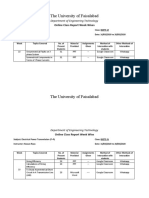
- The University of Faisalabad: Department of Engineering TechnologyDocument12 pagesThe University of Faisalabad: Department of Engineering TechnologySumaira SaifNo ratings yet
- Breakdown in Composite DielectricDocument15 pagesBreakdown in Composite DielectricSumaira SaifNo ratings yet
- The University of Faisalabad: Department of Electrical Engineering TechnologyDocument31 pagesThe University of Faisalabad: Department of Electrical Engineering TechnologySumaira SaifNo ratings yet
- Measurement of DC High VoltagesDocument14 pagesMeasurement of DC High VoltagesSumaira Saif100% (1)
- FYP Report MDocument33 pagesFYP Report MSumaira SaifNo ratings yet
- The University of Faisalabad: Department of Electrical Engineering TechnologyDocument44 pagesThe University of Faisalabad: Department of Electrical Engineering TechnologySumaira SaifNo ratings yet
- FYP Report Lock SystemDocument32 pagesFYP Report Lock SystemSumaira SaifNo ratings yet
- Door LockDocument39 pagesDoor LockSumaira Saif100% (1)
- Forman Christian College A Chartered University: Furqan Alee 14-10239Document33 pagesForman Christian College A Chartered University: Furqan Alee 14-10239Sumaira SaifNo ratings yet
- Energy MeterDocument42 pagesEnergy MeterSumaira SaifNo ratings yet
- Ethical and Unethical Leadership Issues, Cases, and Dilemmas With Case StudiesDocument8 pagesEthical and Unethical Leadership Issues, Cases, and Dilemmas With Case StudiesSumaira SaifNo ratings yet
- Measurement of DC High VoltagesDocument16 pagesMeasurement of DC High VoltagesSumaira SaifNo ratings yet
- Internship Report Feroze PDF FreeDocument29 pagesInternship Report Feroze PDF FreeSumaira SaifNo ratings yet
- Basic Induction Motors ConceptDocument16 pagesBasic Induction Motors ConceptSumaira SaifNo ratings yet
- Construction of Synchronous GeneratorDocument10 pagesConstruction of Synchronous GeneratorSumaira Saif100% (1)
- Equivalent Circuit and Phasor Diagrams of Synchronous GeneratorDocument10 pagesEquivalent Circuit and Phasor Diagrams of Synchronous GeneratorSumaira SaifNo ratings yet
- Internal Voltages of Loaded Machines Under Transient ConditionsDocument6 pagesInternal Voltages of Loaded Machines Under Transient ConditionsSumaira SaifNo ratings yet
- Induction GeneratorDocument12 pagesInduction GeneratorSumaira SaifNo ratings yet
- Induced Voltages in AC Machines.Document6 pagesInduced Voltages in AC Machines.Sumaira SaifNo ratings yet
- Synchronous Machine Models For Stability StudiesDocument29 pagesSynchronous Machine Models For Stability StudiesKashif RehmanNo ratings yet
- Comf6974322 Pss en - IdDocument5 pagesComf6974322 Pss en - IdManusia Kue JaheNo ratings yet
- Utp Cat 6Document2 pagesUtp Cat 6prueba_50No ratings yet
- Hiten Parmar: Physics byDocument5 pagesHiten Parmar: Physics byKailas ArunNo ratings yet
- MENNEKES Catalogue UK IRL 01 PDFDocument88 pagesMENNEKES Catalogue UK IRL 01 PDFKmnzmnNo ratings yet
- Op AmpDocument3 pagesOp Ampgautham poojaryNo ratings yet
- 1985 Ferranti Technical Handbook Standard ICs 198503Document766 pages1985 Ferranti Technical Handbook Standard ICs 198503helveciotfNo ratings yet
- Introduction To Digital ElectronicsDocument12 pagesIntroduction To Digital ElectronicsBean SaladNo ratings yet
- 6AG12266DA325XB0 Datasheet enDocument2 pages6AG12266DA325XB0 Datasheet ensandeshNo ratings yet
- 4x35 RM 2XYDocument1 page4x35 RM 2XYjamilNo ratings yet
- MIS February 2017Document4 pagesMIS February 2017Nayeem PashaNo ratings yet
- Blume EV Primer - 2022Document164 pagesBlume EV Primer - 2022Tejas JosephNo ratings yet
- Toyocool Chiller Controller Manufacturer Instruction ManualDocument17 pagesToyocool Chiller Controller Manufacturer Instruction ManualLucinei ManoelNo ratings yet
- Selecting The Right Soldering IronDocument4 pagesSelecting The Right Soldering IronHow EverNo ratings yet
- Abstract On DC Power Supply and BatteriesDocument18 pagesAbstract On DC Power Supply and Batteriessamad_omidvar629250% (2)
- SI EA PAPro-Reyrolle 7SR46 CatalogDocument23 pagesSI EA PAPro-Reyrolle 7SR46 CatalogJr FellerNo ratings yet
- Solar and Wind Hybrid System For Rural ElectrificationDocument4 pagesSolar and Wind Hybrid System For Rural ElectrificationEditor IJRITCCNo ratings yet
- Argus Npx316r-E3Document4 pagesArgus Npx316r-E3Moo PingNo ratings yet
- Method Statement FOR Embedded Conduits, Boxes and Fittings InstallationDocument6 pagesMethod Statement FOR Embedded Conduits, Boxes and Fittings InstallationWalidNo ratings yet
- EE4003 Power Systems II: Course SyllabusDocument24 pagesEE4003 Power Systems II: Course SyllabusKalum ChandraNo ratings yet
- SEW Eurodrive DTDV - Gearmotor - NomenclatureDocument2 pagesSEW Eurodrive DTDV - Gearmotor - NomenclaturesachinumaryeNo ratings yet
- Voice Controlled Home AutomationDocument29 pagesVoice Controlled Home AutomationAbhijit PattnaikNo ratings yet
- Main Catalogue 9 Transformerer Power SupplyDocument12 pagesMain Catalogue 9 Transformerer Power SupplyRadu Fabian FishyNo ratings yet
- Voltage Controlled OscillatorDocument7 pagesVoltage Controlled OscillatorHemantha DalugamaNo ratings yet
- Final Call IICPE2016Document1 pageFinal Call IICPE2016amit621988No ratings yet
- Renewable Energy (Re) Resources: Philippine Wholesale Electricity Spot Market (Wesm)Document17 pagesRenewable Energy (Re) Resources: Philippine Wholesale Electricity Spot Market (Wesm)Jonathan SantiagoNo ratings yet
- Bulletin 100-C/104-C - IEC ContactorsDocument2 pagesBulletin 100-C/104-C - IEC Contactorsocean_220No ratings yet
- Murphy - PXMS and PXDGS Series Installation Instructions PXMDocument2 pagesMurphy - PXMS and PXDGS Series Installation Instructions PXMJorge ContrerasNo ratings yet
- AlPha Science-Grade4D (PS)Document22 pagesAlPha Science-Grade4D (PS)Zohair HaddadNo ratings yet