Download as docx, pdf, or txt
You might also like
- Automatic Control Kuo Solution Manual 10thDocument978 pagesAutomatic Control Kuo Solution Manual 10thsenayilmaz.2021100% (3)
- Messy Maths: A Playful, Outdoor Approach For Early Years - Pre-School & KindergartenDocument5 pagesMessy Maths: A Playful, Outdoor Approach For Early Years - Pre-School & Kindergartenmewaragi0% (1)
- c02 v11 Solution v2Document48 pagesc02 v11 Solution v2김서진No ratings yet
- Words Into Math Go PDFDocument4 pagesWords Into Math Go PDFChirilicoNo ratings yet
- Solution Manual For PRMLDocument253 pagesSolution Manual For PRMLThafer MajeedNo ratings yet
- Discussion Quiz 10 (40 Points) : SolutionDocument4 pagesDiscussion Quiz 10 (40 Points) : SolutionJan Adrian Galang FranciscoNo ratings yet
- Derivable Maps On Alternative Rings Aplicações Derivação Sobre Anéis AlternativosDocument7 pagesDerivable Maps On Alternative Rings Aplicações Derivação Sobre Anéis AlternativosClaudia FerreiraNo ratings yet
- Math 334 Fall 2011 Homework 11 Solutions: Problem 1Document7 pagesMath 334 Fall 2011 Homework 11 Solutions: Problem 1Ajeet KumarNo ratings yet
- HW1 SolutionsDocument3 pagesHW1 SolutionsMuhammad AbubakerNo ratings yet
- 1 Lagrange Equations - Example 1Document5 pages1 Lagrange Equations - Example 1Faisal ArisandiNo ratings yet
- Solutions GoldsteinDocument10 pagesSolutions GoldsteinAnyiNo ratings yet
- MCE 366 System Dynamics, Spring 2010 Problem Set 1Document8 pagesMCE 366 System Dynamics, Spring 2010 Problem Set 1MartinRodriguezNo ratings yet
- Double Pendulum ModelingDocument3 pagesDouble Pendulum ModelingbediyapNo ratings yet
- HW2 SolutionsDocument10 pagesHW2 SolutionsAravind VinasNo ratings yet
- Lectures On TIDocument18 pagesLectures On TIzubairNo ratings yet
- Math 201 Lecture 18: Convolution: Refers To The Problem Number Refers To The Problem Number in The 8th EditionDocument9 pagesMath 201 Lecture 18: Convolution: Refers To The Problem Number Refers To The Problem Number in The 8th EditionElena IulyNo ratings yet
- Existence and Uniqueness of Nonoscillatory Solutions of First-Order Neutral Differential Equations by Using Banach's TheoremDocument16 pagesExistence and Uniqueness of Nonoscillatory Solutions of First-Order Neutral Differential Equations by Using Banach's TheoremInforma.azNo ratings yet
- Adding SwingDocument3 pagesAdding SwingmozesdeheiligeNo ratings yet
- 5ESB0 2018 05 Midterm AnswersDocument5 pages5ESB0 2018 05 Midterm Answerscancer 123No ratings yet
- EEE 2411 - Lecture 3 - Block Diagram Representation of Control SystemsDocument11 pagesEEE 2411 - Lecture 3 - Block Diagram Representation of Control SystemsKelvin MusyokiNo ratings yet
- Solutions To HW 11Document3 pagesSolutions To HW 11Saul Fernando Cujaban AceroNo ratings yet
- Chapter2 - Modelling in FrequencyDocument51 pagesChapter2 - Modelling in Frequencyعمر الفهدNo ratings yet
- Paper38 Rani JCMCCDocument6 pagesPaper38 Rani JCMCCRemelyn R. LlurcaNo ratings yet
- Multivariable Feedback Control: Andrea GuidiDocument13 pagesMultivariable Feedback Control: Andrea GuidiAndrea GuidiNo ratings yet
- International Journal of Pure and Applied Mathematics No. 1 2012, 1-8Document8 pagesInternational Journal of Pure and Applied Mathematics No. 1 2012, 1-8Talha WaheedNo ratings yet
- Demo Example Problem 1 22march2021Document3 pagesDemo Example Problem 1 22march2021mozesdeheiligeNo ratings yet
- Major Marking SchemeDocument13 pagesMajor Marking Schemejainnupur321No ratings yet
- Solucionario Cap 2 33-47Document9 pagesSolucionario Cap 2 33-47Gian Soriano MNo ratings yet
- Feynman ParameterDocument8 pagesFeynman ParameterNickNo ratings yet
- Solution of Assignment-1: September 20, 2018Document6 pagesSolution of Assignment-1: September 20, 2018jjNo ratings yet
- 2011-01-Elliptic Functions - Addition Formulas PDFDocument4 pages2011-01-Elliptic Functions - Addition Formulas PDFdawson zhaoNo ratings yet
- GOOD - Initial Value Problems and The LaplaceDocument7 pagesGOOD - Initial Value Problems and The LaplaceBelay AyalewNo ratings yet
- Initial Value Problems and The Laplace TransformDocument7 pagesInitial Value Problems and The Laplace TransformKeith GarridoNo ratings yet
- Unit IV Applications of Laplace Transform PDFDocument43 pagesUnit IV Applications of Laplace Transform PDFSanjay KumarNo ratings yet
- Unit 5 - FormulasDocument3 pagesUnit 5 - FormulasAdhi ThyanNo ratings yet
- Double PendulumDocument20 pagesDouble Pendulumdaras2684No ratings yet
- Señal TransitorioDocument6 pagesSeñal TransitorioSalvador Chairez GarciaNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument51 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Double Pendulum PDFDocument7 pagesDouble Pendulum PDFshalukprNo ratings yet
- Class T.10Document34 pagesClass T.10ፈለገ ጊዮንNo ratings yet
- 2018 SolutionDocument9 pages2018 SolutionMohammad Almoghabat AlmNo ratings yet
- NPTEL Online Course: Control Engineering: Assignment 1Document4 pagesNPTEL Online Course: Control Engineering: Assignment 1udayNo ratings yet
- Solution - Dynamics of StructuresDocument7 pagesSolution - Dynamics of StructuresSocialR RecherchesNo ratings yet
- Master - Power - Make Up-2018-2019Document4 pagesMaster - Power - Make Up-2018-2019yassinebrh31No ratings yet
- Topic#2 Review of Mathematical BackgroundDocument33 pagesTopic#2 Review of Mathematical BackgroundAhmed ShafeekNo ratings yet
- Graphoidal Tree D - CoverDocument13 pagesGraphoidal Tree D - CoverDon HassNo ratings yet
- Mit Double PedulumDocument13 pagesMit Double PedulumAntoineNo ratings yet
- Green's Function: University of Zakho Faculty of Science Department of MathematicsDocument13 pagesGreen's Function: University of Zakho Faculty of Science Department of MathematicshayatNo ratings yet
- Week 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDocument6 pagesWeek 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDeepjyoti MajumderNo ratings yet
- Coulson 1958Document14 pagesCoulson 1958ir.noselidzeNo ratings yet
- Lecture 8Document21 pagesLecture 8sreeNo ratings yet
- A Comparison Between Active and Passive Vibration Control of Non-Linear Simple Pendulum PDFDocument12 pagesA Comparison Between Active and Passive Vibration Control of Non-Linear Simple Pendulum PDFmohamed mourad LafifiNo ratings yet
- Solutions To Homework 3: Section 3.4, Repeated Roots Reduction of OrderDocument9 pagesSolutions To Homework 3: Section 3.4, Repeated Roots Reduction of OrderRatih PangestiNo ratings yet
- Math 104-02 (De) - Assignment 02 (Section 2-1) - First Order DEs (Solutions)Document6 pagesMath 104-02 (De) - Assignment 02 (Section 2-1) - First Order DEs (Solutions)Roman LeeNo ratings yet
- Green Function ApplicationDocument8 pagesGreen Function ApplicationNaghijoonNo ratings yet
- Advanced Macro III: Take-Home Examination Answer Sheet: M and Take ExpectationsDocument5 pagesAdvanced Macro III: Take-Home Examination Answer Sheet: M and Take Expectationssofia goicocheaNo ratings yet
- Classical Mechanics Roll#29Document7 pagesClassical Mechanics Roll#29samreenNo ratings yet
- Modular Group Algebras With Almost Maximal Lie Nilpotency IndicesDocument8 pagesModular Group Algebras With Almost Maximal Lie Nilpotency IndicesharishNo ratings yet
- Chem 373 - Lecture 21: Term Symbols-IDocument23 pagesChem 373 - Lecture 21: Term Symbols-INuansak3No ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
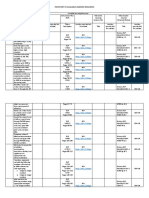
- Inventory of Available Learning Resources: ST THDocument9 pagesInventory of Available Learning Resources: ST THArnold C ZenarosaNo ratings yet
- STR 1996 04 FindingtheeigenmodesDocument13 pagesSTR 1996 04 FindingtheeigenmodesSerge LowNo ratings yet
- CSI 205-Exam IIDocument2 pagesCSI 205-Exam IIGeorges karamNo ratings yet
- Advanced Maths Test: Class: IXDocument9 pagesAdvanced Maths Test: Class: IXKamalNo ratings yet
- Xaliss Jamal Omer - NumericalDocument16 pagesXaliss Jamal Omer - NumericalBrikhov XNo ratings yet
- Semi Detailed Lesson Plan in Mathematics VDocument5 pagesSemi Detailed Lesson Plan in Mathematics VAldrin Bustarga Alfaro100% (1)
- Maths IV PDE&Prob StatisticsDocument3 pagesMaths IV PDE&Prob StatisticsIshaNo ratings yet
- MANSCI Midterm Exam Notes: Chapter 1Document3 pagesMANSCI Midterm Exam Notes: Chapter 1Michelle ManglapusNo ratings yet
- 2nd Form Sequence of WorkDocument7 pages2nd Form Sequence of WorkEustace DavorenNo ratings yet
- Job Interview EssayDocument2 pagesJob Interview Essayapi-252266673No ratings yet
- 2.6 Matrices: Matrix EqualityDocument4 pages2.6 Matrices: Matrix Equalityالزهور لخدمات الانترنيتNo ratings yet
- Robot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Document2 pagesRobot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Layla VuNo ratings yet
- Department of Electrical Engineering EE365L: Communication SystemsDocument15 pagesDepartment of Electrical Engineering EE365L: Communication SystemsAbrahan ShahzadNo ratings yet
- 4.79 F.Y.B.com Mathematics StatisticsDocument8 pages4.79 F.Y.B.com Mathematics StatisticsGanesh RaneNo ratings yet
- FEM U18ME603A SyllabusDocument2 pagesFEM U18ME603A SyllabusNAZEERUDDIN MOHAMMEDNo ratings yet
- Mathematics KBSR Year 3: Nor Salhana Binti Mohd. Arshad - SK LangkawiDocument17 pagesMathematics KBSR Year 3: Nor Salhana Binti Mohd. Arshad - SK LangkawisalinaNo ratings yet
- Inequalities + ModulusDocument36 pagesInequalities + ModulusAbinaya SurianarayananNo ratings yet
- C&NS Unit-3Document31 pagesC&NS Unit-3gayatriNo ratings yet
- 7423Document276 pages7423تفكر وتعلمNo ratings yet
- Numerical Solution of Ordinary Differential Equations: 8.1.1 First Existence TheoremDocument6 pagesNumerical Solution of Ordinary Differential Equations: 8.1.1 First Existence TheoremVishal HariharanNo ratings yet
- A-Level Mathematics: Paper 1 Mark SchemeDocument21 pagesA-Level Mathematics: Paper 1 Mark SchemeOrion BlaqueNo ratings yet
- 2021 Sec 4 A Math Prelim P1 AnsDocument20 pages2021 Sec 4 A Math Prelim P1 AnsAdwin JY LowNo ratings yet
- Mathematics Past QuestionsDocument70 pagesMathematics Past Questionstalabidamilola08No ratings yet
- Probability ps5Document3 pagesProbability ps5Abhi TripathiNo ratings yet
- 02 Bronze 2 - C2 EdexcelDocument16 pages02 Bronze 2 - C2 EdexcelMd Shamim Al MamunNo ratings yet
- Algorithm Design by Kleinberg and Tardos The Art of Computer Programming by Donald Knuth How To Solve It by Computer by R. G. DromeyDocument2 pagesAlgorithm Design by Kleinberg and Tardos The Art of Computer Programming by Donald Knuth How To Solve It by Computer by R. G. DromeyakashlanardNo ratings yet
- Lesson Xii: Free Body Diagram: Physics EngineeringDocument4 pagesLesson Xii: Free Body Diagram: Physics EngineeringMichael Manuel DescatiarNo ratings yet