Download as pdf or txt
You might also like
- IoT - Final PaperDocument2 pagesIoT - Final PaperMuhammad IbrahimNo ratings yet
- SDM Software Development Manager Role GuidelineDocument11 pagesSDM Software Development Manager Role GuidelineKishore KumarNo ratings yet
- Basic Win ISI Training Jun 2020Document262 pagesBasic Win ISI Training Jun 2020Sar CaermareNo ratings yet
- Ap 03402460251Document6 pagesAp 03402460251International Journal of computational Engineering research (IJCER)No ratings yet
- Matchmaking; Distributed Resource Management for High Throughput ComputingDocument7 pagesMatchmaking; Distributed Resource Management for High Throughput ComputingJunliang ChenNo ratings yet
- 1998 - A Resource Management Architecture For Met A Computing Systems - Czajkowski Et AlDocument21 pages1998 - A Resource Management Architecture For Met A Computing Systems - Czajkowski Et Alweimings_1No ratings yet
- Wagner Aaai Real TimeDocument10 pagesWagner Aaai Real TimeAlex RamosNo ratings yet
- 2017 PM Symposium PapersDocument24 pages2017 PM Symposium PapersC.I.A USUNo ratings yet
- Decision BrochureDocument4 pagesDecision BrochureHusain Al TinzNo ratings yet
- Adaptive Resource Management in Middleware: A SurveyDocument13 pagesAdaptive Resource Management in Middleware: A SurveyMarko MilovanovićNo ratings yet
- Land Management System Land Management System: Bringing Together Tools For Managing Our Land and Water ResourcesDocument4 pagesLand Management System Land Management System: Bringing Together Tools For Managing Our Land and Water ResourcesGodwin Badu-MarfoNo ratings yet
- Infraestructura UrbanaDocument46 pagesInfraestructura UrbanaMireya CriolloNo ratings yet
- Self-Organizing Agents For Grid Load BalancingDocument8 pagesSelf-Organizing Agents For Grid Load Balancingsanthosh_ram12No ratings yet
- Introduction To Planning in Multiagent SystemsDocument22 pagesIntroduction To Planning in Multiagent SystemsGabriel de AlmeidaNo ratings yet
- MultiagentDocument5 pagesMultiagentPOOJA SAPRANo ratings yet
- 2159-Article Text-2524-1-10-20080906Document16 pages2159-Article Text-2524-1-10-20080906jousuke higashikataNo ratings yet
- AbstractDocument16 pagesAbstractRajakumaranNo ratings yet
- Reference2 PDFDocument15 pagesReference2 PDFRadha KrishnaNo ratings yet
- Hamida - Goulet (2023) - Hierarchical Reinforcement Learning For Transportation Infrastructure Maintenance PlanningDocument12 pagesHamida - Goulet (2023) - Hierarchical Reinforcement Learning For Transportation Infrastructure Maintenance Planningtonnelau123No ratings yet
- Planning Cia2006Document15 pagesPlanning Cia2006pustyu_niceNo ratings yet
- Multi-Agent Crisis Response Systems - Design Requirements and Analysis of Current SystemsDocument6 pagesMulti-Agent Crisis Response Systems - Design Requirements and Analysis of Current SystemsRyan MenezesNo ratings yet
- Applied Sciences: Multi-Agent SystemsDocument7 pagesApplied Sciences: Multi-Agent SystemsnavecNo ratings yet
- Survey of Multi Agent SystemDocument7 pagesSurvey of Multi Agent SystemUsman AliNo ratings yet
- AMT 2012 OfficialDocument11 pagesAMT 2012 OfficialRahim Ali QamarNo ratings yet
- Resource Allocation in Computational Grids Using Cooperative Self-Organizing AgentsDocument5 pagesResource Allocation in Computational Grids Using Cooperative Self-Organizing AgentsedwinbsNo ratings yet
- Techniques and Directions For Building Very Large Agent TeamsDocument6 pagesTechniques and Directions For Building Very Large Agent TeamskuduzuNo ratings yet
- Col DRL 1Document8 pagesCol DRL 1Atharva MeteNo ratings yet
- An Introduction To Object-Oriented MetricsDocument6 pagesAn Introduction To Object-Oriented MetricsMegan MorrisNo ratings yet
- Learning MachinesDocument6 pagesLearning MachinesL'Homme RévoltéNo ratings yet
- Overseer: A Mobile Context-Aware Collaboration and Task Management System For Disaster ResponseDocument11 pagesOverseer: A Mobile Context-Aware Collaboration and Task Management System For Disaster ResponseIqra NazirNo ratings yet
- Distributed Problem Solving and PlanningDocument34 pagesDistributed Problem Solving and PlanningAbraz KhanNo ratings yet
- 6 2015 A Heuristic Distributed Task Allocation Method For Multivehicle Multitask Problems and Its Application PKDocument14 pages6 2015 A Heuristic Distributed Task Allocation Method For Multivehicle Multitask Problems and Its Application PKrahim qamarNo ratings yet
- W Ksco 2002 Paper 30 SchmorrowDocument2 pagesW Ksco 2002 Paper 30 SchmorrowavigridNo ratings yet
- Camra Ready Paper 247Document5 pagesCamra Ready Paper 247Usman TariqNo ratings yet
- A Multi-Agent System Framework For Decision Support in Stock TradingDocument10 pagesA Multi-Agent System Framework For Decision Support in Stock TradingMaha Abdel AzizNo ratings yet
- Agent Based Modelling of Urban Infrastructure Asset ManagmentDocument13 pagesAgent Based Modelling of Urban Infrastructure Asset ManagmentMubashir SheheryarNo ratings yet
- A Novel Resource Handling Approach Through Scheduling Heterogeneous Peers (RHASHP) in Grid ComputingDocument10 pagesA Novel Resource Handling Approach Through Scheduling Heterogeneous Peers (RHASHP) in Grid Computingmon1984No ratings yet
- Fault Tolerance in Distributed SystemsDocument5 pagesFault Tolerance in Distributed SystemsNorhuda Abdul HalimNo ratings yet
- Interaction Among Agents That Plan: Felipe Rech Meneguzzi Michael LuckDocument8 pagesInteraction Among Agents That Plan: Felipe Rech Meneguzzi Michael LuckgottdammerNo ratings yet
- A Comprehensive Survey of Multi-Agent Reinforcement LearningDocument18 pagesA Comprehensive Survey of Multi-Agent Reinforcement LearningMukund VermaNo ratings yet
- Organizing For A Complex World The Way Ahead 0Document16 pagesOrganizing For A Complex World The Way Ahead 0Sajid KhanNo ratings yet
- Grid Scheduling Using Various Performance Measures - A Comparative StudyDocument12 pagesGrid Scheduling Using Various Performance Measures - A Comparative StudyUbiquitous Computing and Communication JournalNo ratings yet
- Research Paper Sampe-MITDocument6 pagesResearch Paper Sampe-MITpan111No ratings yet
- A Plan-Based Self-Adaptive Intelligent EnvironmentDocument16 pagesA Plan-Based Self-Adaptive Intelligent Environmentel mehdi makNo ratings yet
- The Adaptive Agent Architecture: Achieving Fault-Tolerance Using Persistent Broker TeamsDocument15 pagesThe Adaptive Agent Architecture: Achieving Fault-Tolerance Using Persistent Broker TeamsGreis lormudaNo ratings yet
- 2407.10403v1Document10 pages2407.10403v1drheinrichNo ratings yet
- Practical Applications of MAS e Electrical Power SystemsDocument40 pagesPractical Applications of MAS e Electrical Power SystemsFelipe CarvalhoNo ratings yet
- nsdi20-paper-hauerDocument14 pagesnsdi20-paper-hauerjoyjeet.sarkar.765No ratings yet
- A Policy Evaluation Tool for Multisite Resource ManagementDocument15 pagesA Policy Evaluation Tool for Multisite Resource ManagementJunliang ChenNo ratings yet
- Simulating Task Sharing With Delegation For Autonomy and Authority in Air Traffic ControlDocument7 pagesSimulating Task Sharing With Delegation For Autonomy and Authority in Air Traffic ControlBassam AlqadasiNo ratings yet
- An Efficient and Trustworthy Resource Sharing Platform For Collaborative Cloud ComputingDocument3 pagesAn Efficient and Trustworthy Resource Sharing Platform For Collaborative Cloud ComputingHarishNo ratings yet
- COMADocument10 pagesCOMAKristine WahNo ratings yet
- Agent-Based Computing: Promise and Perils: Nicholas R. JenningsDocument8 pagesAgent-Based Computing: Promise and Perils: Nicholas R. JenningsMarcos José Pérez PérezNo ratings yet
- Service Network Design Problem With Capacity-Demand BalancingDocument61 pagesService Network Design Problem With Capacity-Demand Balancinglei liNo ratings yet
- A Comprehensive Survey of MultiagentDocument17 pagesA Comprehensive Survey of MultiagentUsman AhmedNo ratings yet
- Grid Computing: Amr RekabyDocument5 pagesGrid Computing: Amr RekabyIjact EditorNo ratings yet
- Building Efficient Resource Management Systems in The Cloud: Opportunities and ChallengesDocument16 pagesBuilding Efficient Resource Management Systems in The Cloud: Opportunities and ChallengesAlexking1985No ratings yet
- Cooperative Control of Distributed Multi-Agent SystemsDocument27 pagesCooperative Control of Distributed Multi-Agent Systemsjunaidtps1No ratings yet
- Systematic Inspection of Scheduling Policies and Algorithms in Grid ComputingDocument7 pagesSystematic Inspection of Scheduling Policies and Algorithms in Grid ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Dynamic Modeling of Resource Allocation For Project Management in Multi-Project EnvironmentDocument10 pagesDynamic Modeling of Resource Allocation For Project Management in Multi-Project EnvironmentJosip StjepandicNo ratings yet
- A Vision On Autonomic Distributed Systems: Macedo@Document4 pagesA Vision On Autonomic Distributed Systems: Macedo@Raimundo MacêdoNo ratings yet
- Rand RR1025Document12 pagesRand RR1025Dilan BandusenaNo ratings yet
- Computer Programming: CSC-113 Instructor:MahwishDocument25 pagesComputer Programming: CSC-113 Instructor:Mahwishambreen khalidNo ratings yet
- PHISH & SHIPS Sept 2020Document10 pagesPHISH & SHIPS Sept 2020ANDREASBOULNo ratings yet
- Rh850/F1X Starterkit: User Manual: Hardware Renesas Mcu Rh850 F-SeriesDocument32 pagesRh850/F1X Starterkit: User Manual: Hardware Renesas Mcu Rh850 F-SeriesAvdimonNo ratings yet
- HHDLU DetailsDocument4 pagesHHDLU Detailsfightingfalcon5No ratings yet
- Porting QEMU To Plan 9: QEMU Internals and Port Strategy: Nathaniel Wesley Filardo September 11, 2007Document26 pagesPorting QEMU To Plan 9: QEMU Internals and Port Strategy: Nathaniel Wesley Filardo September 11, 2007Bill GateNo ratings yet
- 104725E-XLTEK EEG BrochureDocument4 pages104725E-XLTEK EEG BrochureRamadhan FebriNo ratings yet
- PSSE Power Flow and Steady State Online Course Notes 1Document504 pagesPSSE Power Flow and Steady State Online Course Notes 1Hamza Abarchi Halarou100% (1)
- Como Hacer Upgrade Centos 6 A 7Document5 pagesComo Hacer Upgrade Centos 6 A 7speedy01722804No ratings yet
- 09 Texturing MethodsDocument5 pages09 Texturing MethodsthrowawayNo ratings yet
- Summary of ChatGPT Related Research and Perspective Towards TH - 2023 - Meta RadDocument14 pagesSummary of ChatGPT Related Research and Perspective Towards TH - 2023 - Meta RadRiddhesh PatelNo ratings yet
- PPDSDK Windows TraceDocument22 pagesPPDSDK Windows TraceAfiq100% (1)
- DSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Document4 pagesDSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Zain NertaNo ratings yet
- CIS Debian Linux 12 Benchmark v1.0.1Document1,011 pagesCIS Debian Linux 12 Benchmark v1.0.1er.alok18No ratings yet
- Lab0 XceliumDocument5 pagesLab0 XceliumKhánh NguyễnNo ratings yet
- Network Time Protocol (NTP) Issues Troubleshooting and Debugging GuideDocument20 pagesNetwork Time Protocol (NTP) Issues Troubleshooting and Debugging GuidedinoNo ratings yet
- Com222 Operating Systems: Lesson 6: DeadlocksDocument23 pagesCom222 Operating Systems: Lesson 6: Deadlocksnchimunya kapepeNo ratings yet
- Factorytalk Pics Adopts Eu Annex 11Document3 pagesFactorytalk Pics Adopts Eu Annex 11PREMIUMISMENo ratings yet
- Full Agenda CANoe - Ethernet Compact OnlineDocument1 pageFull Agenda CANoe - Ethernet Compact OnlinepkumarNo ratings yet
- Chapter 7 - Run Time EnvironmentDocument12 pagesChapter 7 - Run Time Environmentyaredteshager01No ratings yet
- Pcp-Ssp/Api in Java Script For Chrome Browsers: Us/Docs/Web/Api/Mediadevices/GetusermediaDocument2 pagesPcp-Ssp/Api in Java Script For Chrome Browsers: Us/Docs/Web/Api/Mediadevices/Getusermediamr92furqanNo ratings yet
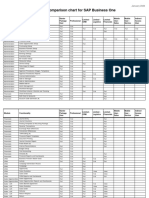
- License Comparison Chart For SAP Business One: Public January 2020Document7 pagesLicense Comparison Chart For SAP Business One: Public January 2020Tony MathewNo ratings yet
- POI - DigitalServicesGovernanceAndManagement - 01112023 - v1.1 FinalDocument10 pagesPOI - DigitalServicesGovernanceAndManagement - 01112023 - v1.1 FinalJohn J. MacasioNo ratings yet
- Mes3083 Set 1 PDFDocument7 pagesMes3083 Set 1 PDFAhmad SolihuddinNo ratings yet
- OS 1 Process ManagementDocument7 pagesOS 1 Process ManagementRitesh KumarNo ratings yet
- Garmin Mapsource ManualDocument56 pagesGarmin Mapsource ManualJuan Carlos100% (3)
- Ugrd It6205a Information Assurance and Security 1prelim FinalsDocument17 pagesUgrd It6205a Information Assurance and Security 1prelim FinalsDina SchaubNo ratings yet
- Egranger Version 1 CodeDocument7 pagesEgranger Version 1 CodeAftab KhakwaniNo ratings yet