Download as pdf or txt
You might also like
- Bids For Connection Quiz - GottmanDocument4 pagesBids For Connection Quiz - GottmanHollie123083% (6)
- Cache Dirt 5700Document5 pagesCache Dirt 5700David LynxNo ratings yet
- Canon C Monstar Jazz Duet PDFDocument9 pagesCanon C Monstar Jazz Duet PDFViệt Vi VuNo ratings yet
- All - Object - Oriented Exam Qs OnlyDocument23 pagesAll - Object - Oriented Exam Qs OnlyPolskiBananNo ratings yet
- Math Workshop, Grade 1: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade 1: A Framework for Guided Math and Independent PracticeNo ratings yet
- AP History - Part 3 GR 1 Mains PDFDocument96 pagesAP History - Part 3 GR 1 Mains PDFratjerry33% (3)
- Eliminator™ FilterDocument97 pagesEliminator™ FilterAltrak 1978100% (2)
- LEDForum Dwayne WaggonerDocument89 pagesLEDForum Dwayne WaggonerAnonymous WRK1qDcNo ratings yet
- Decision-Making Competence in Everyday Life.Document6 pagesDecision-Making Competence in Everyday Life.Chelsea AcostaNo ratings yet
- Sevabharathi Telangana Annual Report 2021-2022Document14 pagesSevabharathi Telangana Annual Report 2021-2022Veeru popuriNo ratings yet
- Clarion nx702 Tx-1087b-ADocument43 pagesClarion nx702 Tx-1087b-Abmw316No ratings yet
- RCC Cladding Wall Detail-D CH-100+460-100+520: LWL Bed LevelDocument1 pageRCC Cladding Wall Detail-D CH-100+460-100+520: LWL Bed Levelrao shoaibNo ratings yet
- Road 22 DP & BB 03Document1 pageRoad 22 DP & BB 03Shashank GiradkarNo ratings yet
- Dicom Cmpsa 2022 049 PL E05 - 0Document1 pageDicom Cmpsa 2022 049 PL E05 - 0NYLER RODRÍGUEZ BARRUETONo ratings yet
- Amphenol - 10 - 25 - 2023 - USB3AP - Datasheet-3359323 UnoDocument6 pagesAmphenol - 10 - 25 - 2023 - USB3AP - Datasheet-3359323 UnoDavid A Alemán QNo ratings yet
- ZX7 400ivDocument1 pageZX7 400ivRobert CaseNo ratings yet
- CMPT 413/713: Natural Language Processing: Nat LanglabDocument31 pagesCMPT 413/713: Natural Language Processing: Nat LanglabWenpei LiNo ratings yet
- Tchavolo Instrument BBDocument2 pagesTchavolo Instrument BBjhon giraldoNo ratings yet
- ACDC - Highway To HellDocument4 pagesACDC - Highway To HellDenis RexhepiNo ratings yet
- Planos 9978Document34 pagesPlanos 9978Omar50% (2)
- m14hw6 2solns PDFDocument9 pagesm14hw6 2solns PDFRose SumbiNo ratings yet
- Terminal A: Dia 3 Dia 4 1+ 1Document1 pageTerminal A: Dia 3 Dia 4 1+ 1Syachrial YusufNo ratings yet
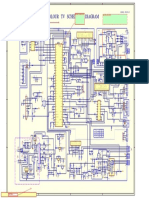
- Chassis PH03FS-29 Diagrama PDFDocument1 pageChassis PH03FS-29 Diagrama PDFAlex NoriegaNo ratings yet
- Circuitos Eléctricos (P To P) para Ricoh Aficio 220/270Document10 pagesCircuitos Eléctricos (P To P) para Ricoh Aficio 220/270desechableNo ratings yet
- !proiecte Autocad (Obelix - Ambro.local)Document1 page!proiecte Autocad (Obelix - Ambro.local)Tudor SerbanNo ratings yet
- KENR5951Document2 pagesKENR5951vova0lopuxNo ratings yet
- PcbdigitDocument1 pagePcbdigitLuis Remigio Torres AcevedoNo ratings yet
- Average Dollars Spent Per Week On Each ActivityDocument1 pageAverage Dollars Spent Per Week On Each Activityapi-25988723No ratings yet
- X550MD 11 0314 1000 MBDocument1 pageX550MD 11 0314 1000 MBLeonardo OspinaNo ratings yet
- Shcematics 23 SepDocument1 pageShcematics 23 SepAnal E SNo ratings yet
- 8fk AlbertDocument2 pages8fk Albertjose alberto cortez camposNo ratings yet
- Rsag7 820 6531 PDFDocument1 pageRsag7 820 6531 PDFRaul BelloNo ratings yet
- ESP: 03301.T025/26 2 A 1: Key PlanDocument1 pageESP: 03301.T025/26 2 A 1: Key PlanJorgeNo ratings yet
- Sanyo LCD PsuDocument1 pageSanyo LCD Psuroca9oNo ratings yet
- GRE - eec.D.99.CL.P.07576.12.014.01 Tracker Controller Cable ConnectionsDocument1 pageGRE - eec.D.99.CL.P.07576.12.014.01 Tracker Controller Cable ConnectionsJason DaNny FloResNo ratings yet
- 1.1 Problem DescriptionDocument68 pages1.1 Problem DescriptionVarun SharmaNo ratings yet
- Fa JVC Lt50da960Document2 pagesFa JVC Lt50da960Fabian OrtuzarNo ratings yet
- 50LD876DI - Circuito de FuenteDocument1 page50LD876DI - Circuito de FuenteMaria HortensiaNo ratings yet
- Hisense Rsag7.820.6289 Psu SCHDocument1 pageHisense Rsag7.820.6289 Psu SCHRoberto MartinezNo ratings yet
- cdd128851 SANKEY CTS21PF1Document1 pagecdd128851 SANKEY CTS21PF1Luis Alfonso Prada LeonNo ratings yet
- BROSUR LilyDocument2 pagesBROSUR Lilyilhamrahma hudiNo ratings yet
- Solutions: Classroom RenderingsDocument26 pagesSolutions: Classroom RenderingsVanerum•StelterNo ratings yet
- Lazy BearDocument1 pageLazy BearDinaNo ratings yet
- Instrument Hookup 9Document1 pageInstrument Hookup 9Wael ZakariaNo ratings yet
- Daemon Sings To Vermithor Ramin Djawadi Extended Piano CoverDocument2 pagesDaemon Sings To Vermithor Ramin Djawadi Extended Piano CoverEber JosuéNo ratings yet
- 010502 - (THETA) 椎名林檎 - 丸の内サディスティックDocument7 pages010502 - (THETA) 椎名林檎 - 丸の内サディスティックmilksoda0221No ratings yet
- E-3.1 Planta Estructural Piso 2 N+3.50Document1 pageE-3.1 Planta Estructural Piso 2 N+3.50andres camilo contrerasNo ratings yet
- Los Materiales Que Requieren Certificación para Su Uso Cumplen Con Este Requisito. - Construcción de Carpintería y Albañilería. NotaDocument1 pageLos Materiales Que Requieren Certificación para Su Uso Cumplen Con Este Requisito. - Construcción de Carpintería y Albañilería. Notacesar rojasNo ratings yet
- Partitura PianoDocument1 pagePartitura PianoEmilyRabeloNo ratings yet
- Stone Grinding Shed Detail Option-2-ModelDocument1 pageStone Grinding Shed Detail Option-2-ModelHabibur RahmanNo ratings yet
- Sansei Tds1650fi Chasis Rsag7.820.6321Document1 pageSansei Tds1650fi Chasis Rsag7.820.6321Luis HuamanNo ratings yet
- Rsag7 820 6321Document1 pageRsag7 820 6321Manuel Medina0% (1)
- Colour TV Schematic Diagram: MODEL: PH03FS-29Document1 pageColour TV Schematic Diagram: MODEL: PH03FS-29gansolNo ratings yet
- Musketier CSV - Trombone 3Document1 pageMusketier CSV - Trombone 3Hugo Valentino Gonzalez CifuentesNo ratings yet
- دور اول 1Document1 pageدور اول 1rahafsaad994No ratings yet
- TubaDocument1 pageTubaDe Jesús SaucedoNo ratings yet
- April Month Ca - 2024Document32 pagesApril Month Ca - 2024vasumathi771994No ratings yet
- Cat 3516Document2 pagesCat 3516et.titaniaNo ratings yet
- Ebs TC 4001Document1 pageEbs TC 4001Cahya RezaNo ratings yet
- Road From Palugaswewa To HabaranaDocument2 pagesRoad From Palugaswewa To HabaranaRenga Ramanujan CNo ratings yet
- Rex Incognito Zhonglis Theme From Genshin Impact YuPeng Chen HOYOMiXDocument3 pagesRex Incognito Zhonglis Theme From Genshin Impact YuPeng Chen HOYOMiX6yk6p6pkq9No ratings yet
- There Is Power in The Blood: Love-Nsky 100Document8 pagesThere Is Power in The Blood: Love-Nsky 100Miguelina Ruiz ContrerasNo ratings yet
- There Is Power in The BloodDocument8 pagesThere Is Power in The BloodMiguelina Ruiz ContrerasNo ratings yet
- Math Workshop, Grade 3: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade 3: A Framework for Guided Math and Independent PracticeNo ratings yet
- Math Workshop, Grade 2: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade 2: A Framework for Guided Math and Independent PracticeNo ratings yet
- Principles of Robot Autonomy I: Motion Planning I: Graph Search MethodsDocument33 pagesPrinciples of Robot Autonomy I: Motion Planning I: Graph Search MethodsratjerryNo ratings yet
- Principles of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsDocument29 pagesPrinciples of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsratjerryNo ratings yet
- Principles of Robot Autonomy I: Robotic Sensors and Introduction To Computer VisionDocument38 pagesPrinciples of Robot Autonomy I: Robotic Sensors and Introduction To Computer VisionratjerryNo ratings yet
- AA 274 Principles of Robotic Autonomy: The Robot Operating System (ROS)Document42 pagesAA 274 Principles of Robotic Autonomy: The Robot Operating System (ROS)ratjerryNo ratings yet
- Principles of Robot Autonomy I: Course Overview, Mobile Robot KinematicsDocument24 pagesPrinciples of Robot Autonomy I: Course Overview, Mobile Robot KinematicsratjerryNo ratings yet
- Principles of Robot Autonomy I: Trajectory Tracking and Closed-Loop ControlDocument18 pagesPrinciples of Robot Autonomy I: Trajectory Tracking and Closed-Loop ControlratjerryNo ratings yet
- Principles of Robot Autonomy I: Camera Models and Camera CalibrationDocument20 pagesPrinciples of Robot Autonomy I: Camera Models and Camera CalibrationratjerryNo ratings yet
- Principles of Robot Autonomy I: Open-Loop Motion Control and Differential FlatnessDocument25 pagesPrinciples of Robot Autonomy I: Open-Loop Motion Control and Differential FlatnessratjerryNo ratings yet
- A Committee of GovernorsDocument1 pageA Committee of GovernorsratjerryNo ratings yet
- Public Debt Outstanding of StateDocument1 pagePublic Debt Outstanding of StateratjerryNo ratings yet
- List of The Centrally Sponsored SchemesDocument14 pagesList of The Centrally Sponsored SchemesratjerryNo ratings yet
- Trans-Amf Eng Man v44Document84 pagesTrans-Amf Eng Man v44AyeminThetNo ratings yet
- Understanding OTDRDocument10 pagesUnderstanding OTDRAnonymous 6PurzyegfXNo ratings yet
- Hare OracleDocument82 pagesHare Oraclestuart billington100% (3)
- Ee8701 - High Voltage Engineering Department of Eee 2020-2021Document40 pagesEe8701 - High Voltage Engineering Department of Eee 2020-2021EEE ConferenceNo ratings yet
- Research Proposal Guidelines MaldivesDocument2 pagesResearch Proposal Guidelines MaldivesmikeNo ratings yet
- E-Content Typing (Free Job) - BigFazeDocument5 pagesE-Content Typing (Free Job) - BigFazeshibaprasad0115No ratings yet
- HRM Dessler 08 Training and DevelopmentDocument52 pagesHRM Dessler 08 Training and DevelopmentQila Qils Ecky100% (6)
- A Minimal Harmonic Controller For A STATCOMDocument10 pagesA Minimal Harmonic Controller For A STATCOMAnonymous zfmlsb2GjANo ratings yet
- EKKO ProjectDocument2 pagesEKKO ProjectGeofisica GusZavNo ratings yet
- Fire Alarm HVAC InterlockDocument5 pagesFire Alarm HVAC InterlockWaseem Siddique100% (1)
- How To Make Bregedel TempeDocument2 pagesHow To Make Bregedel Tempetriana puji50% (2)
- DT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFDocument62 pagesDT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFSabit ShaihollaNo ratings yet
- Solution Manager 7Document24 pagesSolution Manager 7Md Abdullah Al MamunNo ratings yet
- Meaning of Home ArticleDocument19 pagesMeaning of Home Articlebrainhub50No ratings yet
- Request For New PAN Card Or/ and Changes or Correction in PAN DataDocument1 pageRequest For New PAN Card Or/ and Changes or Correction in PAN Datasrinivas moraNo ratings yet
- Gamification and Evaluation of The Use The Agile Tests in Software Quality Subjects: The Application of Case StudiesDocument8 pagesGamification and Evaluation of The Use The Agile Tests in Software Quality Subjects: The Application of Case StudiesAndré AndradeNo ratings yet
- Autoflame Sensors Guide: Combustion Management SystemsDocument41 pagesAutoflame Sensors Guide: Combustion Management SystemsFAROUKNo ratings yet
- Header Specification: Mplab Icd 2Document12 pagesHeader Specification: Mplab Icd 2knoppix2008No ratings yet
- QA-QC Inspection Request FormDocument1 pageQA-QC Inspection Request FormShaikh Ubaid Ur RehmanNo ratings yet
- Statically Indeterminate Shaft-Bearing Systems: D Cos DDocument14 pagesStatically Indeterminate Shaft-Bearing Systems: D Cos DIvelin ValchevNo ratings yet
- Dissertation Tolga UhlmannDocument8 pagesDissertation Tolga UhlmannBestPaperWritingServiceClarksville100% (1)
- Prtitura Kalimba - Abcdefu by GAYLE - LetrasDocument9 pagesPrtitura Kalimba - Abcdefu by GAYLE - LetrasJenny MottaNo ratings yet
- MicropaleontologyDocument20 pagesMicropaleontologyMUHAMMAD FAUZI RODZEENo ratings yet
- Course Information For Current Semester/Term: Maklumat Kursus Untuk Semester/Penggal SemasaDocument6 pagesCourse Information For Current Semester/Term: Maklumat Kursus Untuk Semester/Penggal SemasaCamila HalikNo ratings yet
- Assignment 3 11-5-23Document3 pagesAssignment 3 11-5-23Haider khan100% (2)