Download as pdf or txt
You might also like
- Lab 1 - Introduction To 8086 Microprocessor EmulatorDocument10 pagesLab 1 - Introduction To 8086 Microprocessor EmulatorSaif Ullah100% (3)
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- Presentaion 6 Microcontroller and MicroprocessorDocument27 pagesPresentaion 6 Microcontroller and MicroprocessorwabdushukurNo ratings yet
- MCRL01E Module 3Document29 pagesMCRL01E Module 3Kenneth Brian PejiNo ratings yet
- Introduction To Peripherals InterfacingDocument23 pagesIntroduction To Peripherals Interfacingabu sayedNo ratings yet
- Introduction To Motorola 68HC11: 1.1 ObjectivesDocument36 pagesIntroduction To Motorola 68HC11: 1.1 ObjectivesRaoul ToludNo ratings yet
- Unit 1Document6 pagesUnit 1Sonu zehen001No ratings yet
- What Is A Microprocessor?: Introduction To PICDocument20 pagesWhat Is A Microprocessor?: Introduction To PICNEETHU PRAKASHNo ratings yet
- Introduction To Pic Microcontroller'SDocument4 pagesIntroduction To Pic Microcontroller'SSurbhi JainNo ratings yet
- Chapter One Introduction & Evolution of MicroprocessorDocument68 pagesChapter One Introduction & Evolution of Microprocessorabel bahiru100% (1)
- Hardware Organisation of Computers and MicroprocessorsDocument33 pagesHardware Organisation of Computers and MicroprocessorsUchenna OgunkaNo ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Module 1 8051 Microcontroller 1Document52 pagesModule 1 8051 Microcontroller 1unknownwalkernaunknownwalkernaNo ratings yet
- Module 3 (Ddco)Document35 pagesModule 3 (Ddco)manasashivanna7991No ratings yet
- Intro To Microcomputers: Block Diagram of A Typical MicrocomputerDocument6 pagesIntro To Microcomputers: Block Diagram of A Typical MicrocomputerShaheer TariqNo ratings yet
- Unit - 2 COADocument23 pagesUnit - 2 COAArun KrishNo ratings yet
- Module 3 (Ddco)Document28 pagesModule 3 (Ddco)manasashivanna7991No ratings yet
- Unit 1 NewDocument59 pagesUnit 1 NewHari PrasathNo ratings yet
- Introduction To Mechatronics: Microcontrollers and MicroprocessorsDocument12 pagesIntroduction To Mechatronics: Microcontrollers and MicroprocessorsAmanuel tadiwosNo ratings yet
- General Organisation of A Micro ProcessorDocument8 pagesGeneral Organisation of A Micro ProcessornelsrodrigNo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Microprocessors Vs MicrocontrollersDocument40 pagesMicroprocessors Vs MicrocontrollersNgaa SiemensNo ratings yet
- Microcontroller: College: MCAS Section: V-Semester Presented By: Shabeeba. PDocument13 pagesMicrocontroller: College: MCAS Section: V-Semester Presented By: Shabeeba. PShabeebaNawabNo ratings yet
- Sistem Mikropemproses & PengawalmikroDocument388 pagesSistem Mikropemproses & Pengawalmikrozahrim100% (1)
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Unit 1: Computers, Microprocessors and MicrocontrollersDocument65 pagesUnit 1: Computers, Microprocessors and MicrocontrollersHARSHITHA BHAVISETTINo ratings yet
- Module 5 MicroprocessorDocument7 pagesModule 5 MicroprocessornatsuNo ratings yet
- Computer System OrganizationDocument126 pagesComputer System Organizationbiswadeepbasak0212No ratings yet
- Basics of ComputersDocument13 pagesBasics of ComputersFintonPaulNo ratings yet
- Microcontrollerpresentation 141213101338 Conversion Gate01Document41 pagesMicrocontrollerpresentation 141213101338 Conversion Gate01priyalNo ratings yet
- Unit - Ii 2.0) Introduction: Digital Logic and Computer OrganizationDocument32 pagesUnit - Ii 2.0) Introduction: Digital Logic and Computer OrganizationJit AggNo ratings yet
- Computer System ComponentsDocument47 pagesComputer System Componentsசுதாகரன் கோபாலகிருஷ்ணன்No ratings yet
- COA Module 1 BEC306CDocument24 pagesCOA Module 1 BEC306Csachinksr007No ratings yet
- TOPIC - 1 MicroprocessorDocument38 pagesTOPIC - 1 MicroprocessorPrevenaManiamNo ratings yet
- Class 1-Introduction To Microprocessor PDFDocument36 pagesClass 1-Introduction To Microprocessor PDFDeepika AgrawalNo ratings yet
- MP 8085 NotesDocument37 pagesMP 8085 NotesSaddam AnsariNo ratings yet
- Microcontroller&Its Applications 2021 NotesDocument38 pagesMicrocontroller&Its Applications 2021 NotesAnirban MandalNo ratings yet
- 2.embedded MicrocontrollersDocument42 pages2.embedded Microcontrollersgezaegebre1No ratings yet
- UNIT-IDocument16 pagesUNIT-IpadmaNo ratings yet
- The System UnitDocument53 pagesThe System Unitk3lvynNo ratings yet
- Csi Computer 7 3rd Quarter LPDocument6 pagesCsi Computer 7 3rd Quarter LPVj KomichoNo ratings yet
- Microprocessor and Microcontroller Lecture NoteDocument23 pagesMicroprocessor and Microcontroller Lecture Noteireoluwa.akinkurolereNo ratings yet
- What Is A MicroprocessorDocument25 pagesWhat Is A MicroprocessorFiromsa DineNo ratings yet
- Design CharacteristicsDocument11 pagesDesign CharacteristicsFrankline OchiengNo ratings yet
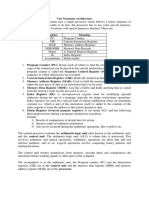
- Von Neumann ArchitectureDocument8 pagesVon Neumann ArchitectureDinesh KumarNo ratings yet
- Microprocessors and MicrocontrollersDocument22 pagesMicroprocessors and Microcontrollers6012 ANILNo ratings yet
- MicroprocessorDocument11 pagesMicroprocessornave101No ratings yet
- 3.1 Components of Central Processing UnitDocument15 pages3.1 Components of Central Processing Unithazardahmed132No ratings yet
- Chapter 1Document45 pagesChapter 1udgam pandeyNo ratings yet
- Introduction To Micro Lect3Document21 pagesIntroduction To Micro Lect3Annalyn SoriaNo ratings yet
- Micro ControllersDocument28 pagesMicro Controllersyoboiiii649No ratings yet
- CPEN 100 Structural Components of Microprocessor and Microcontroller.1Document35 pagesCPEN 100 Structural Components of Microprocessor and Microcontroller.1Jiever AustriaNo ratings yet
- Microprocessors NotesDocument65 pagesMicroprocessors NoteswizardvenkatNo ratings yet
- COA NotesDocument36 pagesCOA NotessunnybaggaNo ratings yet
- MIT NotesDocument24 pagesMIT Notesrohitkhushalani77No ratings yet
- Unit IDocument45 pagesUnit ISakile ChinnuNo ratings yet
- Microprocessor Lecture 1Document18 pagesMicroprocessor Lecture 1ojasbhosale07No ratings yet
- Embedded System Unit 1 (VTU)Document20 pagesEmbedded System Unit 1 (VTU)GucciNo ratings yet
- Microcontroller - Wikipedia..Document7 pagesMicrocontroller - Wikipedia..452bobNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesFrom EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesNo ratings yet
- Part-Bb Questions: Essay FamilyDocument2 pagesPart-Bb Questions: Essay FamilyChadaram JagadishNo ratings yet
- CH 5 Robot End EffectorsDocument12 pagesCH 5 Robot End EffectorsChadaram JagadishNo ratings yet
- Of Computersystems. Quality, To: IntegratedDocument2 pagesOf Computersystems. Quality, To: IntegratedChadaram JagadishNo ratings yet
- HMT 2 Assignment-20-21-II SemDocument1 pageHMT 2 Assignment-20-21-II SemChadaram JagadishNo ratings yet
- Iem QuestionsDocument1 pageIem QuestionsChadaram JagadishNo ratings yet
- Second Assignment Questions of IRDocument3 pagesSecond Assignment Questions of IRChadaram JagadishNo ratings yet
- Unit-I-Aircraft Refrigeration SystemsDocument9 pagesUnit-I-Aircraft Refrigeration SystemsChadaram Jagadish100% (1)
- R&ac Assin - 2 - 2021Document1 pageR&ac Assin - 2 - 2021Chadaram JagadishNo ratings yet
- 31 BT Sup Not June2021Document2 pages31 BT Sup Not June2021Chadaram JagadishNo ratings yet
- Ramachandra College of Engineering: EluruDocument2 pagesRamachandra College of Engineering: EluruChadaram JagadishNo ratings yet
- Go MS 39Document7 pagesGo MS 39Chadaram JagadishNo ratings yet
- BT 2 2 R16 Supply 2019Document4 pagesBT 2 2 R16 Supply 2019Chadaram JagadishNo ratings yet
- Solving Transportation Problem Using Vogel's Approximation Method, Stepping Stone Method & Modified Distribution MethodDocument38 pagesSolving Transportation Problem Using Vogel's Approximation Method, Stepping Stone Method & Modified Distribution MethodChadaram JagadishNo ratings yet
- New Doc 2020-01-21 19.41.01 PDFDocument2 pagesNew Doc 2020-01-21 19.41.01 PDFChadaram JagadishNo ratings yet
- Career Objective:: ResumeDocument1 pageCareer Objective:: ResumeChadaram JagadishNo ratings yet
- Quiz/Mid Marks Report B8:R16:2:2:3:B:R1622032:1:MDocument2 pagesQuiz/Mid Marks Report B8:R16:2:2:3:B:R1622032:1:MChadaram JagadishNo ratings yet
- Vapour Power Cycle 1Document129 pagesVapour Power Cycle 1Chadaram JagadishNo ratings yet
- Special Purpose LathesDocument33 pagesSpecial Purpose LathesChadaram JagadishNo ratings yet
- Batch-1: Department of Mechanical EngineeringDocument3 pagesBatch-1: Department of Mechanical EngineeringChadaram JagadishNo ratings yet
- Assignment-I-MC &MT PDFDocument2 pagesAssignment-I-MC &MT PDFChadaram JagadishNo ratings yet
- 1 ST Assignment Section-A&B 3-1 Semester Dmm-2: Sir CR Reddy College of EngineeringDocument3 pages1 ST Assignment Section-A&B 3-1 Semester Dmm-2: Sir CR Reddy College of EngineeringChadaram JagadishNo ratings yet
- DOM Assignment-I 2020-21 NewDocument2 pagesDOM Assignment-I 2020-21 NewChadaram JagadishNo ratings yet
- The 8085 Microprocessor ArchitectureDocument12 pagesThe 8085 Microprocessor ArchitectureBernard MunyithyaNo ratings yet
- C File System File FunctionsDocument26 pagesC File System File FunctionsMoh MohNo ratings yet
- 8051 TutorialDocument116 pages8051 TutorialMohammedtajuddin TajuddinNo ratings yet
- CSE 2320 - Systems Programming: Chapter 1: Introduction To Systems Programming and Languages UsedDocument34 pagesCSE 2320 - Systems Programming: Chapter 1: Introduction To Systems Programming and Languages UsedAlazar GetachewNo ratings yet
- John Uffenbeck - Microcomputers and MicroprocessorsDocument712 pagesJohn Uffenbeck - Microcomputers and MicroprocessorsAnilov MartinNo ratings yet
- Assignment 1Document2 pagesAssignment 1Shivendra KeshariNo ratings yet
- MicrocontrollersAP EC 50 MCDocument206 pagesMicrocontrollersAP EC 50 MCGREENY blackyNo ratings yet
- Esp32 Wroom 32 Datasheet enDocument29 pagesEsp32 Wroom 32 Datasheet enGading AuliaNo ratings yet
- Xps EpcDocument50 pagesXps EpcAK SinghNo ratings yet
- Eye Blink Car Accident Prevention SystemDocument55 pagesEye Blink Car Accident Prevention Systembonsatilahun1992No ratings yet
- Intel (Microprocessor)Document8 pagesIntel (Microprocessor)Anirudh KhattriNo ratings yet
- MPMC QB ANS 3 0 (Both QB)Document65 pagesMPMC QB ANS 3 0 (Both QB)Gangadhar JenaNo ratings yet
- Cs3691 EmbeddedDocument30 pagesCs3691 EmbeddedSelva PriyaNo ratings yet
- Introduction of Microprocessor: Presented By: Engr. Jayson P. DolorielDocument25 pagesIntroduction of Microprocessor: Presented By: Engr. Jayson P. DolorielNelgine Moreno GepuitNo ratings yet
- 02 Addressing ModesDocument53 pages02 Addressing ModesHayder AliNo ratings yet
- 8085 LecturesDocument101 pages8085 LecturesMohamed Amer HaiderNo ratings yet
- LPC177x 178x User ManualDocument1,035 pagesLPC177x 178x User ManualMadison PottNo ratings yet
- ES Slids Lec14NDocument17 pagesES Slids Lec14NRemy MendozaNo ratings yet
- Computer Organization Assembler and Simulator CSE112 ProjectDocument16 pagesComputer Organization Assembler and Simulator CSE112 ProjectFUSION々 AnkitNo ratings yet
- Memory Addressing and Instruction FormatsDocument9 pagesMemory Addressing and Instruction Formatsrobern ndoloNo ratings yet
- Revie WWW SsDocument13 pagesRevie WWW Sskeithleene trinidadNo ratings yet
- STM 8 Af 6266Document99 pagesSTM 8 Af 6266bargunanNo ratings yet
- 1Ch1-Introduction To Microprocessor and Computer, Brey BarryDocument110 pages1Ch1-Introduction To Microprocessor and Computer, Brey BarryChanchan LebumfacilNo ratings yet
- Rockwell Micro850 Free Tag NamesDocument8 pagesRockwell Micro850 Free Tag NamesTrần Văn ToảnNo ratings yet
- 8051 - C ProgrammingDocument13 pages8051 - C ProgrammingRajesh ShahNo ratings yet
- Siemens S7 1200 S7 1500 Absolute Addressing EthernetDocument13 pagesSiemens S7 1200 S7 1500 Absolute Addressing EthernetmakotamaquinasNo ratings yet
- ModBus User Manual - V1.0Document20 pagesModBus User Manual - V1.0AllamNo ratings yet
- Anna University Jaya Engineering CollegeDocument87 pagesAnna University Jaya Engineering CollegeLakshmi NarayananNo ratings yet
- Architecture 8085Document46 pagesArchitecture 8085milf hunterNo ratings yet