Download as pdf or txt
You might also like
- Relative Value Analysis of SwaptionsDocument85 pagesRelative Value Analysis of SwaptionsbobmezzNo ratings yet
- Measuring Cross Gamma Risk SSRNDocument16 pagesMeasuring Cross Gamma Risk SSRNbobmezzNo ratings yet
- SolutionsDocument8 pagesSolutionsSanjeev BaghoriyaNo ratings yet
- 502Document3 pages502TheAlpha CephNo ratings yet
- Expected Value Markov ChainsDocument10 pagesExpected Value Markov Chainsps1976No ratings yet
- Notes MCIIDocument14 pagesNotes MCIIgeetharaman1699No ratings yet
- MIT6 436JF18 Lec24 PDFDocument9 pagesMIT6 436JF18 Lec24 PDFhabtemariam mollaNo ratings yet
- Fundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionDocument6 pagesFundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionSaurabh ShandilyaNo ratings yet
- MIT6 436JF18 Lec23Document9 pagesMIT6 436JF18 Lec23DevendraReddyPoreddyNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov ChainsbobmezzNo ratings yet
- 4703 07 Notes MC PDFDocument7 pages4703 07 Notes MC PDFjpalacios806853No ratings yet
- Chapter 10 Limiting Distribution of Markov Chain (Lecture On 02-04-2021) - STAT 243 - Stochastic ProcessDocument6 pagesChapter 10 Limiting Distribution of Markov Chain (Lecture On 02-04-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- Notes On Markov ChainDocument34 pagesNotes On Markov ChainCynthia NgNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov Chainssdilips19898170No ratings yet
- Markov ChainsDocument9 pagesMarkov ChainsMauro Luiz Brandao JuniorNo ratings yet
- Week 5Document8 pagesWeek 5文 徐No ratings yet
- Stationary Distributions of Markov Chains: Will PerkinsDocument20 pagesStationary Distributions of Markov Chains: Will PerkinsVrundNo ratings yet
- Discrete Time Markov ChainsDocument59 pagesDiscrete Time Markov ChainsIsabella AlvarengaNo ratings yet
- CasarottoDocument7 pagesCasarottoDharmendra KumarNo ratings yet
- 1 Strong Law of Large NumbersDocument6 pages1 Strong Law of Large NumbersArturo ZamudioNo ratings yet
- Lecture 6: Markov ChainsDocument4 pagesLecture 6: Markov ChainsspitzersglareNo ratings yet
- Convergence of Markov Processes: Martin HairerDocument39 pagesConvergence of Markov Processes: Martin HairerhmducvnNo ratings yet
- Solusi 4.18Document4 pagesSolusi 4.18MivTah Al BughisiyyahNo ratings yet
- 1 Markov Chains: Indian Institute of Technology BombayDocument15 pages1 Markov Chains: Indian Institute of Technology BombayRajNo ratings yet
- Symplectic Manifolds1Document8 pagesSymplectic Manifolds1Salim DávilaNo ratings yet
- PPT7-Discrete Time - Markov ChainDocument37 pagesPPT7-Discrete Time - Markov ChainFajar PrasetyoNo ratings yet
- CoPM Lecture1Document17 pagesCoPM Lecture1fayssal achhoudNo ratings yet
- 3Document58 pages3Mijailht SosaNo ratings yet
- Chap MarkovDocument19 pagesChap MarkovSaumya LarokarNo ratings yet
- PStat 160 A Homework SolutionsDocument6 pagesPStat 160 A Homework Solutionslex7396No ratings yet
- Math 170b Notions of ConvergenceDocument8 pagesMath 170b Notions of ConvergenceTianqi WuNo ratings yet
- Lecture 3Document10 pagesLecture 3Karoomi GoNo ratings yet
- Chap1-2 Markov ChainDocument82 pagesChap1-2 Markov ChainBoul chandra GaraiNo ratings yet
- Hoeffding BoundsDocument9 pagesHoeffding Boundsphanminh91No ratings yet
- BechorDocument8 pagesBechorEpic WinNo ratings yet
- Lecture Note 660507181102100Document25 pagesLecture Note 660507181102100snvhsfm.23No ratings yet
- Note 1 1Document7 pagesNote 1 1Subhra SankarNo ratings yet
- Volfovsky PDFDocument11 pagesVolfovsky PDFShreya MondalNo ratings yet
- Markov ChainDocument37 pagesMarkov ChainNyoman Arto SupraptoNo ratings yet
- Lecture10 06Document6 pagesLecture10 06GONZALONo ratings yet
- Math 312 Lecture Notes Markov ChainsDocument9 pagesMath 312 Lecture Notes Markov Chainsfakame22No ratings yet
- 1 Pratiksha Presentation1Document4 pages1 Pratiksha Presentation1richarai2312No ratings yet
- Markov ChainsDocument42 pagesMarkov Chainsbuhyounglee7010No ratings yet
- Markov ChainsDocument13 pagesMarkov Chainsmittalnipun2009No ratings yet
- Tutsheet 7 NewDocument4 pagesTutsheet 7 NewVishal PatelNo ratings yet
- MAT 4305 Lecture Note 3Document4 pagesMAT 4305 Lecture Note 3Ishadi DilankaNo ratings yet
- Markov Chains ErgodicityDocument8 pagesMarkov Chains ErgodicitypiotrpieniazekNo ratings yet
- Cadena de MarkovDocument20 pagesCadena de MarkovJaime PlataNo ratings yet
- Foss Lecture4Document12 pagesFoss Lecture4Jarsen21No ratings yet
- Symplectic Manifolds3Document8 pagesSymplectic Manifolds3Salim DávilaNo ratings yet
- ProbstatDocument16 pagesProbstatShreetama BhattacharyaNo ratings yet
- 9 - Markov ChainsDocument14 pages9 - Markov ChainsTuấn ĐỗNo ratings yet
- Lecture 5Document3 pagesLecture 5gikiruroseNo ratings yet
- Chapter 2Document24 pagesChapter 2ching chauNo ratings yet
- Applied Stochastic ProcessesDocument2 pagesApplied Stochastic ProcessesAyush SekhariNo ratings yet
- Stochastic Processes and Time Series Markov Chains - V: 1 Identifying The DecompositionDocument7 pagesStochastic Processes and Time Series Markov Chains - V: 1 Identifying The DecompositionBiju Angalees100% (1)
- StochBioChapter3 PDFDocument46 pagesStochBioChapter3 PDFThomas OrNo ratings yet
- Markov ChainDocument47 pagesMarkov Chain李冠霆No ratings yet
- Markov Chains (4728)Document14 pagesMarkov Chains (4728)John JoelNo ratings yet
- IOE516 - Stochastic Processes II Homework Set 2 - Suggested SolutionsDocument6 pagesIOE516 - Stochastic Processes II Homework Set 2 - Suggested SolutionsAloke ChatterjeeNo ratings yet
- Stochastic Processes and Time Series Markov Chains - III: 1 Markov Chain: Classification of StatesDocument4 pagesStochastic Processes and Time Series Markov Chains - III: 1 Markov Chain: Classification of StatesBiju AngaleesNo ratings yet
- FX Talking: Some Stark DivergenceDocument15 pagesFX Talking: Some Stark DivergencebobmezzNo ratings yet
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Document19 pagesTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNo ratings yet
- 1 IEOR 4701: Continuous-Time Markov ChainsDocument22 pages1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNo ratings yet
- ING Think Rates Spark Shifting GroundsDocument6 pagesING Think Rates Spark Shifting GroundsbobmezzNo ratings yet
- Derivatives Across Asset ClassesDocument59 pagesDerivatives Across Asset ClassesbobmezzNo ratings yet
- The Convexity Maven: "Building A Better Volatility Mousetrap"Document13 pagesThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNo ratings yet
- Siegel ParadoxDocument4 pagesSiegel ParadoxbobmezzNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov ChainsbobmezzNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
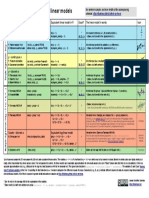
- Common Statistical Tests Are Linear ModelsDocument1 pageCommon Statistical Tests Are Linear ModelsbobmezzNo ratings yet
- GS Inflation Implementation 10-20Document20 pagesGS Inflation Implementation 10-20bobmezzNo ratings yet
- DB - Fed Notes Mar 20Document12 pagesDB - Fed Notes Mar 20bobmezzNo ratings yet
- Global Cycle Notes Hope Springs EternalDocument27 pagesGlobal Cycle Notes Hope Springs EternalbobmezzNo ratings yet
- Dynamical Functional Equations PDFDocument2 pagesDynamical Functional Equations PDFbobmezzNo ratings yet
- Market Volatility BulletinDocument28 pagesMarket Volatility BulletinbobmezzNo ratings yet
- Effect of Correlation On Bond Prices in Short RateDocument13 pagesEffect of Correlation On Bond Prices in Short RatebobmezzNo ratings yet
- Berenberg Global ForecastsDocument15 pagesBerenberg Global ForecastsbobmezzNo ratings yet
- Numerical Methods For Hamilton-Jacobi-Bellman EquationsDocument68 pagesNumerical Methods For Hamilton-Jacobi-Bellman EquationsbobmezzNo ratings yet
- An Application of The Calculus of Variations To Sturm Liouville TheoryDocument13 pagesAn Application of The Calculus of Variations To Sturm Liouville TheorybobmezzNo ratings yet
- The 2013 Capital Requirements Directive IV and Capital Requirements Regulation: Implications and Institutional EffectsDocument49 pagesThe 2013 Capital Requirements Directive IV and Capital Requirements Regulation: Implications and Institutional EffectsbobmezzNo ratings yet
- Grade 11 Mathematics Social ScienceDocument9 pagesGrade 11 Mathematics Social ScienceKamil AliNo ratings yet
- 1-Introduction AnnotatedDocument21 pages1-Introduction AnnotatedANIL EREN GÖÇERNo ratings yet
- Batch Planning and Resource Allocation Master MDEDocument6 pagesBatch Planning and Resource Allocation Master MDEAna Andreea HorbencoNo ratings yet
- Gaussian Process Approximations of Stochastic Differential EquationDocument16 pagesGaussian Process Approximations of Stochastic Differential EquationaaNo ratings yet
- 2022 - A Comparative Study of Different Machine Learning Methods For Reservoirlandslide Displacement PredictionDocument12 pages2022 - A Comparative Study of Different Machine Learning Methods For Reservoirlandslide Displacement Predictionyankun wangNo ratings yet
- Ec6003 Robotics SyllabusDocument3 pagesEc6003 Robotics SyllabussuganyaNo ratings yet
- Chapter 4 Revision Test (Fitting Lines To Data) PDFDocument6 pagesChapter 4 Revision Test (Fitting Lines To Data) PDFPNo ratings yet
- L5 Neural NetworkDocument67 pagesL5 Neural Networkchau.pm020902No ratings yet
- Chapter 3 #19 Problem X Chapter 5 #24Document15 pagesChapter 3 #19 Problem X Chapter 5 #24Kevin CoughlinNo ratings yet
- Unit 3 - Week 2: Assignment 2Document4 pagesUnit 3 - Week 2: Assignment 2shubhamNo ratings yet
- Page Ref: 276Document22 pagesPage Ref: 276NashNo ratings yet
- DL Notes 1 5 Deep LearningDocument189 pagesDL Notes 1 5 Deep Learningsugumar100% (1)
- Unit 1Document144 pagesUnit 1AkilaNo ratings yet
- M323 Exam 3 Prac KeyDocument7 pagesM323 Exam 3 Prac Keyikechukwujoel8No ratings yet
- AIML Lab ManualDocument41 pagesAIML Lab Manualheartyhome.inNo ratings yet
- Class X-Maths-Polynomials-Aecs2 MumbaiDocument5 pagesClass X-Maths-Polynomials-Aecs2 MumbaiALPA JOSHINo ratings yet
- Confidence Interval SolutionsDocument2 pagesConfidence Interval SolutionsRonnieMaeMaullion100% (1)
- FLOWCHARTDocument26 pagesFLOWCHARTStanley BennettNo ratings yet
- Autokorelasi SpasialDocument35 pagesAutokorelasi SpasialfaiqNo ratings yet
- Navo Minority Over-Sampling Technique (Nmote) : A Consistent Performance Booster On Imbalanced DatasetsDocument42 pagesNavo Minority Over-Sampling Technique (Nmote) : A Consistent Performance Booster On Imbalanced DatasetsHeri SetiawanNo ratings yet
- On Adaptive FilterDocument25 pagesOn Adaptive FilterRaghu ReddyNo ratings yet
- Bidirectional LSTM Networks For Poetry Generation in HindiDocument4 pagesBidirectional LSTM Networks For Poetry Generation in HindiInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Boxcoxmix PDFDocument19 pagesBoxcoxmix PDFRheza YogatamaNo ratings yet
- A Deterministic Annealing Neural Network For Convex ProgrammingDocument13 pagesA Deterministic Annealing Neural Network For Convex ProgrammingHarsh ChittoraNo ratings yet
- Random Number Generators1Document26 pagesRandom Number Generators1Scribd JdjNo ratings yet
- V3 1Document16 pagesV3 1Ridwan WkNo ratings yet
- Different Artificial Neural Networks ArchitecturesDocument27 pagesDifferent Artificial Neural Networks ArchitecturesHarsh DeshwalNo ratings yet
- MATLAB Full Lab ReportDocument30 pagesMATLAB Full Lab ReportactuatorNo ratings yet
- Unit 7 - Week 6: Assignment 6Document4 pagesUnit 7 - Week 6: Assignment 6Raushan KashyapNo ratings yet
- Pdetool Example: U (0, Y, T) U (1, Y, T) 0 U (X, 0, T) U (X, 1, T) 0Document4 pagesPdetool Example: U (0, Y, T) U (1, Y, T) 0 U (X, 0, T) U (X, 1, T) 0أبو كعب علاء الدينNo ratings yet