Download as pdf or txt
You might also like
- Electrostatics: Physics 162 Lab Section #1 Summer 2021Document3 pagesElectrostatics: Physics 162 Lab Section #1 Summer 2021AruzhanNo ratings yet
- Fundamentals of Modern Physics 3rd Ed by Eisberg, Robert MartinDocument98 pagesFundamentals of Modern Physics 3rd Ed by Eisberg, Robert MartinKaren N. Masurk100% (1)
- Control Principles: Tutorial #3 Block DiagramDocument27 pagesControl Principles: Tutorial #3 Block DiagramReagan TorbiNo ratings yet
- Control Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & InstrumentationDocument27 pagesControl Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & Instrumentationzahid ullahNo ratings yet
- Chapter3 - Block Diagram - Reduction - 01-1Document27 pagesChapter3 - Block Diagram - Reduction - 01-1bayu laksanaNo ratings yet
- Regulation and Control Engineering: 2.4.1. Block Diagram Reduction TechniquesDocument24 pagesRegulation and Control Engineering: 2.4.1. Block Diagram Reduction Techniquestilahun modammedNo ratings yet
- CH 3 2Document27 pagesCH 3 2Magarsaa Qana'iiNo ratings yet
- Block Diagram: Dr. Issam ELGMATIDocument32 pagesBlock Diagram: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Block Diagram Reduction Techniques: Control System EngineeringDocument24 pagesBlock Diagram Reduction Techniques: Control System EngineeringShreya TripathiNo ratings yet
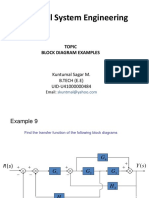
- Control System Engineering: Topic Block Diagram ExamplesDocument42 pagesControl System Engineering: Topic Block Diagram ExamplesjpatrNo ratings yet
- Examplesofblockdiagram 150415045655 Conversion Gate01Document42 pagesExamplesofblockdiagram 150415045655 Conversion Gate01Mostafa Abdelalim0% (1)
- Block Diagram Reduction Rules PDFDocument18 pagesBlock Diagram Reduction Rules PDFsvijiNo ratings yet
- Control5 2020 Block Diagram ManipulationDocument20 pagesControl5 2020 Block Diagram ManipulationKhong JunYonGNo ratings yet
- Control Principles: Unit IDocument30 pagesControl Principles: Unit ISam potterNo ratings yet
- Block Diagram AlgebraDocument28 pagesBlock Diagram AlgebraSirshenduNo ratings yet
- ECE451 Lec#3Document38 pagesECE451 Lec#3Ali MohamedNo ratings yet
- System Engineering ECE 451: Professor Dr. Hanan Ahmed KamalDocument38 pagesSystem Engineering ECE 451: Professor Dr. Hanan Ahmed KamalNoha IbrahimNo ratings yet
- 351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram ReductionDocument70 pages351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram Reductionmishal shakeelNo ratings yet
- Concept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyDocument23 pagesConcept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyHiral HiraniNo ratings yet
- SA2019-20 CHAPTER 1 Block DiagramDocument23 pagesSA2019-20 CHAPTER 1 Block DiagramMohamad Firdaus Ismal Hafis bin Mohd MokhtarNo ratings yet
- Control System Engineering: Topic Block Diagram RepresentationDocument24 pagesControl System Engineering: Topic Block Diagram RepresentationWaqas AfzalNo ratings yet
- Block Diagram Reduction TechniquesDocument27 pagesBlock Diagram Reduction TechniquessreenathreddyNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- 5 Block Diagram Representation of LTI SystemsDocument7 pages5 Block Diagram Representation of LTI SystemsDj OoNo ratings yet
- Solution A3 NPTEL Control Engg Jan April 2020Document12 pagesSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- Semana 3: Dr. Ignacio ChangDocument14 pagesSemana 3: Dr. Ignacio Changpathy cocreNo ratings yet
- Exercises 05 Block Diagram ReductionDocument3 pagesExercises 05 Block Diagram ReductionKabo MphanyaneNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Lecture 2 Block Diagram Representation of Control SystemsDocument57 pagesLecture 2 Block Diagram Representation of Control SystemsAmeer FauwazNo ratings yet
- Tutorial 11Document25 pagesTutorial 11Yang ElvisQUNo ratings yet
- Block Diagram ReductionDocument26 pagesBlock Diagram Reductionmamnd tahaNo ratings yet
- Block Diagram and SFG - Practice Sheet 01Document11 pagesBlock Diagram and SFG - Practice Sheet 01adityaliugongNo ratings yet
- Lec04: Objectives: Unit 2 Control SystemDocument6 pagesLec04: Objectives: Unit 2 Control SystemJosena SSNo ratings yet
- Lecture 5 Block Diagram Representation of Control Systems PDFDocument60 pagesLecture 5 Block Diagram Representation of Control Systems PDFNicole Anne BorromeoNo ratings yet
- Reduction of Complicated Block DiagramsDocument45 pagesReduction of Complicated Block Diagramstilahun modammedNo ratings yet
- Lec 04Document12 pagesLec 04Adit 0110No ratings yet
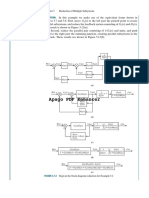
- M8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Document45 pagesM8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Shuvro Sankar SenNo ratings yet
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- MECH261 Control Principles: Tutorial #3Document27 pagesMECH261 Control Principles: Tutorial #3Krushnasamy SuramaniyanNo ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- Bode Plot PresentationDocument48 pagesBode Plot PresentationJulcemar CapellaroNo ratings yet
- Solution Assignment 3Document7 pagesSolution Assignment 3sushant sharmaNo ratings yet
- Block Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Document11 pagesBlock Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Dewashish KarmiyalNo ratings yet
- Modern Control Engineering: System's RepresentationDocument30 pagesModern Control Engineering: System's RepresentationBrooklynPrinceNo ratings yet
- ControlDocument10 pagesControlapi-3757260No ratings yet
- BLK and SFG PDFDocument48 pagesBLK and SFG PDFyeabsira gashawNo ratings yet
- 2.4.1 Ej Diagrama de BloquesDocument1 page2.4.1 Ej Diagrama de BloquesJairo Andres Andrade ManzanoNo ratings yet
- Block Diagram - TF - Steady State ErrorsDocument93 pagesBlock Diagram - TF - Steady State ErrorsTarek A-RNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- CHEE319 Tutorial 4 SolnDocument13 pagesCHEE319 Tutorial 4 SolnyeshiduNo ratings yet
- Lecture - 2 Block Signal FlowDocument77 pagesLecture - 2 Block Signal Flowkibwe anthoNo ratings yet
- FeedbackDocument39 pagesFeedbackhazem ab2009No ratings yet
- Regulation and Control: by Tewedage SileshiDocument12 pagesRegulation and Control: by Tewedage SileshihermelaNo ratings yet
- Control Systems - DIV B - Tutorial 1Document3 pagesControl Systems - DIV B - Tutorial 1Avadh VadhiyaNo ratings yet
- ALGEBRA DE BLOQUES (Ejercicios) 1.:) (1) (IdentificandoDocument4 pagesALGEBRA DE BLOQUES (Ejercicios) 1.:) (1) (Identificandojeferson javier jimenez merchanNo ratings yet
- Operations On Graph PDFDocument5 pagesOperations On Graph PDFPranjal Das100% (1)
- Lecture 5 (Block Diagram Representation & Reduction)Document51 pagesLecture 5 (Block Diagram Representation & Reduction)muhammad hamzaNo ratings yet
- Classifying Spaces for Surgery and Corbordism of Manifolds. (AM-92), Volume 92From EverandClassifying Spaces for Surgery and Corbordism of Manifolds. (AM-92), Volume 92No ratings yet
- 2.2 Time Response Analysis-Second Order SystemDocument26 pages2.2 Time Response Analysis-Second Order Systemearnest normanNo ratings yet
- 1.3 Signal Flow GraphDocument33 pages1.3 Signal Flow Graphearnest normanNo ratings yet
- Time Response Analysis - First Order SystemDocument32 pagesTime Response Analysis - First Order Systemearnest normanNo ratings yet
- Introduction To Control SystemsDocument38 pagesIntroduction To Control Systemsearnest normanNo ratings yet
- SP 52.13330.2016 (Updated SNiP 23-05-95) - Natural and Artificial LightingDocument67 pagesSP 52.13330.2016 (Updated SNiP 23-05-95) - Natural and Artificial LightingValentínNo ratings yet
- Me 4400 MCQDocument11 pagesMe 4400 MCQschaudhary93348% (23)
- General Physics 2 Current and ResistanceDocument24 pagesGeneral Physics 2 Current and ResistanceCassandra Mae Bauit PascuaNo ratings yet
- Diagram Based Qns in ScienceDocument10 pagesDiagram Based Qns in Sciencesultanamubarak09No ratings yet
- A SPECIFIC HEAT Crime Scene Investigation G10 Group 1-1Document4 pagesA SPECIFIC HEAT Crime Scene Investigation G10 Group 1-1Bojana SimicNo ratings yet
- Blue Illustrative Understanding Characterization Education PresentationDocument28 pagesBlue Illustrative Understanding Characterization Education PresentationChikapu TrashcanNo ratings yet
- 10th CBSe - CURRENT ELECTRICITY QUESTIONSDocument7 pages10th CBSe - CURRENT ELECTRICITY QUESTIONSmanojboaNo ratings yet
- DBR PDFDocument7 pagesDBR PDFrajeev shahNo ratings yet
- Statically Determinate Structures: J. D. Todd, Structural Theory and Analysis © J. D. Todd 1974Document2 pagesStatically Determinate Structures: J. D. Todd, Structural Theory and Analysis © J. D. Todd 1974Akintade TimothyNo ratings yet
- USA Test HKRiflesDocument45 pagesUSA Test HKRiflesJaume StrumbolNo ratings yet
- Vacuum Pumps - Calculating Flow Rate and Required Evacuation TimeDocument3 pagesVacuum Pumps - Calculating Flow Rate and Required Evacuation TimecordobaluisfNo ratings yet
- Physics Chapter 3Document5 pagesPhysics Chapter 3melodiusixNo ratings yet
- Kolhan University, Chaibasa: Proposed Syllabus For B.Sc. (Honours) PHYSICSDocument63 pagesKolhan University, Chaibasa: Proposed Syllabus For B.Sc. (Honours) PHYSICSBikashNo ratings yet
- Diagnostic Struct TheoryDocument10 pagesDiagnostic Struct TheoryLotis KeeNo ratings yet
- University of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelDocument4 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelAMINA ATTANo ratings yet
- BRCM College of Engineering & Technology Bahal, Bhiwani: Practical Experiment Instructions SheetDocument31 pagesBRCM College of Engineering & Technology Bahal, Bhiwani: Practical Experiment Instructions SheetAnonymous vvO0nZWflrNo ratings yet
- Electronic Structure of MatterDocument47 pagesElectronic Structure of MatterMary Rose Lepardo - RosanesNo ratings yet
- 120-10788 Isir RepDocument3 pages120-10788 Isir RepMechtek LabNo ratings yet
- Data Analysis in ArcheryDocument30 pagesData Analysis in ArcheryJago WestawayNo ratings yet
- Unit IV Theories of Failure: Introduction: Due To Large Numbers of Examples of Compound Stresses MetDocument23 pagesUnit IV Theories of Failure: Introduction: Due To Large Numbers of Examples of Compound Stresses MetMohtasham NaeemNo ratings yet
- Coiled TubingDocument87 pagesCoiled TubingBoedi Syafiq100% (1)
- Chapter 4-2Document12 pagesChapter 4-2Abdalmalek ShamsanNo ratings yet
- Kloeckner Westok A5 Pocket GuideDocument36 pagesKloeckner Westok A5 Pocket GuidekyleNo ratings yet
- Pressure of Gases: General Chemistry 1Document9 pagesPressure of Gases: General Chemistry 1Daniel Corcino50% (2)
- Practice SheetDocument4 pagesPractice SheetsatishNo ratings yet
- Materials 10 01401 PDFDocument9 pagesMaterials 10 01401 PDFmanjunath k sNo ratings yet
- WCD P3Document43 pagesWCD P3RupaliNo ratings yet
- Arithmetic Progressions-Revision NotesDocument16 pagesArithmetic Progressions-Revision NotesRahul BanerjeeNo ratings yet