Download as pdf or txt
You might also like
- Transfer Function of DC MotorDocument16 pagesTransfer Function of DC Motorlaabi340% (5)
- A Differential Equation For DC MotorDocument7 pagesA Differential Equation For DC MotorAhmed HwaidiNo ratings yet
- Complete Notes On 9th Physics by Asif RasheedDocument82 pagesComplete Notes On 9th Physics by Asif RasheedAsif Rasheed Rajput75% (28)
- 02 Atomic Structure and Interatomic BondingDocument77 pages02 Atomic Structure and Interatomic BondingJhoe TangoNo ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Single-Phase AC Circuits: Version 2 EE IIT, KharagpurDocument13 pagesSingle-Phase AC Circuits: Version 2 EE IIT, KharagpurSai SrivatsaNo ratings yet
- gr6 - ch12Document7 pagesgr6 - ch12Abolghasem Sadeghi-NiarakiNo ratings yet
- Project Report DCSDocument51 pagesProject Report DCSEngr XamirNo ratings yet
- Speed of Motor Which I'd ControlDocument15 pagesSpeed of Motor Which I'd Controlsagarahir151No ratings yet
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- Module 3Document16 pagesModule 3Bu DakNo ratings yet
- Lab # 5 Modeling of Translational Mechanical System and To Calculate Its Various ResponsesDocument18 pagesLab # 5 Modeling of Translational Mechanical System and To Calculate Its Various Responseszain islamNo ratings yet
- EEEE6115 UBa22EP025 AC m3Document20 pagesEEEE6115 UBa22EP025 AC m3Wanki CharlesNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Lab 2 Contorl SystemDocument14 pagesLab 2 Contorl Systemhassan ullah khanNo ratings yet
- Reflection & Refraction: - Z) / (Z +Z), / (Z +Z)Document38 pagesReflection & Refraction: - Z) / (Z +Z), / (Z +Z)amir amirNo ratings yet
- Research Article: DC Motor Parameter Identification Using Speed Step ResponsesDocument5 pagesResearch Article: DC Motor Parameter Identification Using Speed Step ResponsesDawn VargasNo ratings yet
- CS Lect.2 Modeling in The Frequency DomainDocument60 pagesCS Lect.2 Modeling in The Frequency DomainHassan AliNo ratings yet
- Cid 2020 M2PSC01Document7 pagesCid 2020 M2PSC01ANITTA VINCENTNo ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Bipin Silwal Lab 02Document7 pagesBipin Silwal Lab 02Binit ShresthaNo ratings yet
- Igcse Sample PaperDocument8 pagesIgcse Sample PaperharshanauocNo ratings yet
- 03-Electromechanical and Mechanical Systems - Practical MATLAB Modeling With SimulinkDocument40 pages03-Electromechanical and Mechanical Systems - Practical MATLAB Modeling With SimulinkRonaldo NainggolanNo ratings yet
- Lecture 2Document12 pagesLecture 2akhbar elyoum academyNo ratings yet
- Park TransformationDocument6 pagesPark TransformationfirdousulnazirNo ratings yet
- Comparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorDocument9 pagesComparison Between Butterfly Optimization Algorithm and Particle Swarm Optimization For Tuning Cascade PID Control System of PMDC MotorFresy NugrohoNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- UNIT V Power System StabilityDocument112 pagesUNIT V Power System Stabilityid.danlard5282No ratings yet
- Flywheel 2Document6 pagesFlywheel 2hassaneabdo2020No ratings yet
- Ü9 Basics On Electrical Power Grids - SolutionsDocument18 pagesÜ9 Basics On Electrical Power Grids - SolutionshaxanNo ratings yet
- Utilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Document21 pagesUtilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Frozen BoyNo ratings yet
- 230 Power System Stability PDFDocument31 pages230 Power System Stability PDFBelayneh Tadesse100% (1)
- General Power System Dynamic Modeling: Signals Dynamics and Control (2010/11)Document16 pagesGeneral Power System Dynamic Modeling: Signals Dynamics and Control (2010/11)Paulo RijoNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- Ident DC MotorDocument5 pagesIdent DC MotorEmailsuman ExbiiNo ratings yet
- DC Motor Parameter Identification Using Speed Step ResponsesDocument6 pagesDC Motor Parameter Identification Using Speed Step ResponsesHasson SniperNo ratings yet
- Antenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringDocument25 pagesAntenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringKenneth CastroNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- Control System Lab ManualDocument57 pagesControl System Lab Manualokay45486No ratings yet
- Armature Controlled DCMotor Transfer FunctionDocument2 pagesArmature Controlled DCMotor Transfer FunctionRGiteya63% (8)
- My Pid PaperDocument9 pagesMy Pid PaperUkoima Kelvin NkaloNo ratings yet
- Calculation of On-State and Switching Losses in A PWM DC/AC or DC/DC ConverterDocument6 pagesCalculation of On-State and Switching Losses in A PWM DC/AC or DC/DC ConverterAli KeyvanNo ratings yet
- DSSI - 3 - Simulation of DC Motor (2015)Document4 pagesDSSI - 3 - Simulation of DC Motor (2015)KenHuNo ratings yet
- Condition Of Maximum Torque In Three Phase Induction Motor | Electrical engineering interview questionsDocument10 pagesCondition Of Maximum Torque In Three Phase Induction Motor | Electrical engineering interview questionsshumbablessing4No ratings yet
- Exp 1 Transfer Function of Armature Controlled DC MotorDocument7 pagesExp 1 Transfer Function of Armature Controlled DC MotorHardik Agravatt0% (1)
- Simulation of Electric Machines and Drive Systems Using Matlab and SimulinkDocument11 pagesSimulation of Electric Machines and Drive Systems Using Matlab and SimulinkmdpkishoreNo ratings yet
- CSTRDocument12 pagesCSTRRuri Agung WahyuonoNo ratings yet
- HhjkaDocument22 pagesHhjkaAshenafi AbuyeNo ratings yet
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocument13 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNo ratings yet
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1Document3 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 4 - System Response Self Assessment Exercise No.1cataiceNo ratings yet
- Chapter 4 - Lecture NotesDocument15 pagesChapter 4 - Lecture NotesZairul IzwanNo ratings yet
- Practical: - 01: Aim: - Apparatus: - TheoryDocument3 pagesPractical: - 01: Aim: - Apparatus: - TheoryJay MonparaNo ratings yet
- Laplace Transforms and Its ApplicationsDocument4 pagesLaplace Transforms and Its ApplicationsAhmed S. El-MoghazyNo ratings yet
- Mover, Otherwise Known As The Turbine. For: R P S T K XDocument16 pagesMover, Otherwise Known As The Turbine. For: R P S T K XMohamad SannanNo ratings yet
- Unit 4Document51 pagesUnit 4karnatisharathNo ratings yet
- Presentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Document30 pagesPresentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Parameswararao BillaNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Viscosity ExperimentDocument4 pagesViscosity Experimentblackant007100% (2)
- Cambridge International AS & A Level: PHYSICS 9702/23Document16 pagesCambridge International AS & A Level: PHYSICS 9702/23Shazia AsifNo ratings yet
- Conservation of EnergyDocument18 pagesConservation of Energyapi-285179261100% (1)
- Quarter 1: Week 4.1: SoundsDocument3 pagesQuarter 1: Week 4.1: SoundsLougene CastroNo ratings yet
- Failure of Springs PDFDocument10 pagesFailure of Springs PDFMilind Chimurkar100% (1)
- Friction (Static) X MovementDocument5 pagesFriction (Static) X MovementSharun SureshNo ratings yet
- Ss1 Physics 1st Term Lesson Note PDFDocument47 pagesSs1 Physics 1st Term Lesson Note PDFnassreal01No ratings yet
- Full Chapter Seismic Analysis of Structures and Equipment Praveen K Malhotra PDFDocument53 pagesFull Chapter Seismic Analysis of Structures and Equipment Praveen K Malhotra PDFtommy.belcher812100% (7)
- Set 10Document3 pagesSet 10Shahil AzmayishNo ratings yet
- 0625 November 2011 Paper 23 Mark SchemeDocument7 pages0625 November 2011 Paper 23 Mark SchemeDionisio UssacaNo ratings yet
- Factor de Friccion FluidosDocument11 pagesFactor de Friccion FluidosGilmer Rojas ChavezNo ratings yet
- CBFEM MC l3 Column-Bases PDFDocument83 pagesCBFEM MC l3 Column-Bases PDFrk0001No ratings yet
- Riser NippleDocument3 pagesRiser NippleMahmoud Nmies100% (5)
- Tcs Physics Syllabus 2013 2014Document9 pagesTcs Physics Syllabus 2013 2014api-235625414No ratings yet
- Mohamed Yr 10 Physics Exam (Midterm)Document15 pagesMohamed Yr 10 Physics Exam (Midterm)victor bettNo ratings yet
- Biomechanics Final ProjectDocument12 pagesBiomechanics Final Projectapi-285913253No ratings yet
- Handout Plaxis Introduction Course - Session 3Document46 pagesHandout Plaxis Introduction Course - Session 3Mehdi.Most0% (1)
- FR Goldschmied - Integrated Hull Design Boundary Layer ControlDocument10 pagesFR Goldschmied - Integrated Hull Design Boundary Layer ControlVictor PadillaNo ratings yet
- Multiple Choice 3 Circular MotionDocument7 pagesMultiple Choice 3 Circular MotionRazi's DarkzNo ratings yet
- Introduction To Convective Heat TransferDocument49 pagesIntroduction To Convective Heat TransferSangita SangamNo ratings yet
- Simplified Flutter Prevention Criteria For Personal Type AircraftDocument27 pagesSimplified Flutter Prevention Criteria For Personal Type AircraftDavid Russo100% (2)
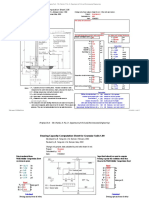
- Retaining Wall Stability Computation Sheet 2.05Document3 pagesRetaining Wall Stability Computation Sheet 2.05Gustavo PaganiniNo ratings yet
- Survey of Mechanical Working: A. IntroductionDocument4 pagesSurvey of Mechanical Working: A. IntroductionAsif AhmedNo ratings yet
- 11th Physics Question Paper May 2022 - Governmentexams - Co.inDocument12 pages11th Physics Question Paper May 2022 - Governmentexams - Co.indevichandiran85No ratings yet
- Automatic TransmissionDocument20 pagesAutomatic TransmissionDwy Bagus NNo ratings yet
- Components of Universal Testing Machine (UTM)Document4 pagesComponents of Universal Testing Machine (UTM)michael john aquinoNo ratings yet
- Lecture07 Pipeflow HandoutDocument3 pagesLecture07 Pipeflow Handoutgtarun22gupta50% (2)
- Introduction and Orientation: CE151P-2 Building Systems EngineeringDocument11 pagesIntroduction and Orientation: CE151P-2 Building Systems EngineeringMela TumanganNo ratings yet