Download as pdf or txt
You might also like
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- The Real-Time Application InterfaceDocument17 pagesThe Real-Time Application InterfaceOG vibesNo ratings yet
- Jinesh (Real Time Systems in Linux)Document27 pagesJinesh (Real Time Systems in Linux)yuben josephNo ratings yet
- Case Study in RtlinuxDocument5 pagesCase Study in Rtlinuxajith shettyNo ratings yet
- Building Ethernet Drivers On Rtlinux-GplDocument7 pagesBuilding Ethernet Drivers On Rtlinux-GplAnil KumarNo ratings yet
- Priority Inversion Problem PaperDocument6 pagesPriority Inversion Problem PaperjayanthimurthyNo ratings yet
- P01 RTLinuxDocument26 pagesP01 RTLinuxSudheer Reddy100% (1)
- We Bi 001Document3 pagesWe Bi 001সঞ্জয় মাহাতোNo ratings yet
- RtosDocument42 pagesRtospipul36No ratings yet
- Real Time Linux SlideDocument12 pagesReal Time Linux SlideSimmi JoshiNo ratings yet
- Project SRSDocument2 pagesProject SRSrnbmmtsNo ratings yet
- A Real-Time Linux: Email Address: The Research Described Here Was Partially Funded Under NSF Grant CCR-9409454Document9 pagesA Real-Time Linux: Email Address: The Research Described Here Was Partially Funded Under NSF Grant CCR-9409454వంశీ క్రిష్ణNo ratings yet
- So What Makes An RTOS Special?Document8 pagesSo What Makes An RTOS Special?Mahmoud NaguibNo ratings yet
- Electronics 10 01331 v2Document28 pagesElectronics 10 01331 v2Hà VũNo ratings yet
- A Firm Real-Time System Implementation Using Commercial Off-The-Shelf Hardware and Free SoftwareDocument8 pagesA Firm Real-Time System Implementation Using Commercial Off-The-Shelf Hardware and Free Softwareravi02431No ratings yet
- 3.2 Rtlinux Inter-Process Communication (Ipc)Document8 pages3.2 Rtlinux Inter-Process Communication (Ipc)ravirajsjoshiNo ratings yet
- Improving Real Time Performance of Linux System UsDocument6 pagesImproving Real Time Performance of Linux System UsnomolNo ratings yet
- A Thread Synchronization Model For The PREEMPT - RT Linux KernelDocument41 pagesA Thread Synchronization Model For The PREEMPT - RT Linux KernelFabricio Cen de CardNo ratings yet
- QNX - Real Time or Real LinuxDocument12 pagesQNX - Real Time or Real LinuxpippomicrosoftNo ratings yet
- Real-Time Operating Systems: Part 1: Mars Pathfinder 1997Document159 pagesReal-Time Operating Systems: Part 1: Mars Pathfinder 1997Khalid FaharaNo ratings yet
- Advanced Embedded System Design: Project ReportDocument7 pagesAdvanced Embedded System Design: Project ReportSyed Akhlaq100% (1)
- Real Time Linux SlideDocument13 pagesReal Time Linux SlideTzarSkbNo ratings yet
- 06ec6035 - Advanced Microcontrollers and Real Time Operating SystemsDocument49 pages06ec6035 - Advanced Microcontrollers and Real Time Operating SystemsJagadeeshNo ratings yet
- RTLinuxDocument34 pagesRTLinuxpradnya patilNo ratings yet
- Real Time Operating SystemsDocument44 pagesReal Time Operating SystemsAnand PatraNo ratings yet
- RtosDocument37 pagesRtosnikhat khanNo ratings yet
- Rtos PDFDocument33 pagesRtos PDFrasagna sarangaNo ratings yet
- RTOSDocument28 pagesRTOSJeffersonNo ratings yet
- Vxworks Vs RTLinuxDocument5 pagesVxworks Vs RTLinuxNithin RamakrishnaNo ratings yet
- Yartos Motorola UcDocument6 pagesYartos Motorola UcBogdan RosandićNo ratings yet
- RTL - ManifestoDocument12 pagesRTL - ManifestoparthopradhanNo ratings yet
- The Real-Time Driver Model and First ApplicationsDocument8 pagesThe Real-Time Driver Model and First ApplicationsJhonatan GutierrezNo ratings yet
- Linux As A Real-Time Operating System: Manas Saksena Timesys CorporationDocument43 pagesLinux As A Real-Time Operating System: Manas Saksena Timesys CorporationVáíbhàv Kálé PátílNo ratings yet
- Xenomai - Implementing A RTOS Emulation Framework On GNU/LinuxDocument12 pagesXenomai - Implementing A RTOS Emulation Framework On GNU/LinuxbooneadNo ratings yet
- 29 Johla Joeha145 RTLinux Chimera SchedulingDocument12 pages29 Johla Joeha145 RTLinux Chimera SchedulingAnonymous RrGVQjNo ratings yet
- Real Time Operating SystemsDocument15 pagesReal Time Operating SystemsSaro VrsNo ratings yet
- A Comparison of Scheduling Latency in Linux, PREEMPT RT, and LITMUSDocument11 pagesA Comparison of Scheduling Latency in Linux, PREEMPT RT, and LITMUSPocho GomezNo ratings yet
- Embedded Linux - Ready For Real-Time - MontaVistaDocument13 pagesEmbedded Linux - Ready For Real-Time - MontaVistazelazniNo ratings yet
- Real TimeDocument28 pagesReal TimeEric VerhulstNo ratings yet
- Rtlinux: (Ece-496) Section-E2E04Document3 pagesRtlinux: (Ece-496) Section-E2E04Bhupender KumawatNo ratings yet
- 2 RtosDocument38 pages2 RtosRaghu TejaNo ratings yet
- Rtos ComparisonDocument44 pagesRtos ComparisonKarthikeyan TNo ratings yet
- RT Linux - AimsDocument29 pagesRT Linux - AimsswathiNo ratings yet
- 2003 Wilcox Softirq PDFDocument6 pages2003 Wilcox Softirq PDFhotsync101No ratings yet
- Components of A Network Operating SystemDocument15 pagesComponents of A Network Operating Systemgerome_vasNo ratings yet
- Real Time Linux Steve MatovskiDocument11 pagesReal Time Linux Steve MatovskiElfraniaNo ratings yet
- Study of Commercial RTOSDocument16 pagesStudy of Commercial RTOSnespijorziNo ratings yet
- Real-Time Operating Systems An Ongoing ReviewDocument4 pagesReal-Time Operating Systems An Ongoing Reviewsharath_rakkiNo ratings yet
- Tracing For Hardware, Driver and Binary Reverse Engineering in LinuxDocument8 pagesTracing For Hardware, Driver and Binary Reverse Engineering in LinuxAhmed HamoudaNo ratings yet
- Words 02Document9 pagesWords 02imanhariz02No ratings yet
- Linux Kernel Internals: ResearchDocument16 pagesLinux Kernel Internals: ResearchWonhui LeeNo ratings yet
- Operating System Noise in The Linux KernelDocument12 pagesOperating System Noise in The Linux KernelAman PrasadNo ratings yet
- The Chimera II Real-Time Operating System For Advanced Sensor-Based Control ApplicationsDocument14 pagesThe Chimera II Real-Time Operating System For Advanced Sensor-Based Control ApplicationsDaniel ValadezNo ratings yet
- Unit2 ClassnotesDocument77 pagesUnit2 Classnotescb105ec022No ratings yet
- Pertemuan OS - Id.enDocument11 pagesPertemuan OS - Id.enBayu FerdinandNo ratings yet
- Linux: A Comprehensive Guide to Linux Operating System and Command LineFrom EverandLinux: A Comprehensive Guide to Linux Operating System and Command LineNo ratings yet
- Rust for Network Programming and Automation, Second Edition: Work around designing networks, TCP/IP protocol, packet analysis and performance monitoring using Rust 1.68From EverandRust for Network Programming and Automation, Second Edition: Work around designing networks, TCP/IP protocol, packet analysis and performance monitoring using Rust 1.68No ratings yet
- Docker: The Complete Guide to the Most Widely Used Virtualization Technology. Create Containers and Deploy them to Production Safely and Securely.: Docker & Kubernetes, #1From EverandDocker: The Complete Guide to the Most Widely Used Virtualization Technology. Create Containers and Deploy them to Production Safely and Securely.: Docker & Kubernetes, #1No ratings yet
- English IndrDocument17 pagesEnglish Indrvinod kapateNo ratings yet
- Internet Connection Sharing: 2003 (Home and Professional Editions) - This Article Covers Only BroadbandDocument3 pagesInternet Connection Sharing: 2003 (Home and Professional Editions) - This Article Covers Only Broadbandvinod kapateNo ratings yet
- BSD1Document1 pageBSD1vinod kapateNo ratings yet
- ICS2Document2 pagesICS2vinod kapateNo ratings yet
- IP AddressDocument1 pageIP Addressvinod kapateNo ratings yet
- SECURITY DOC'mDocument26 pagesSECURITY DOC'mvinod kapateNo ratings yet
- Project Musical SirenDocument10 pagesProject Musical Sirenvinod kapateNo ratings yet
- Seminar On-: Real Time Scheduling Policy For Embedded System DomainDocument25 pagesSeminar On-: Real Time Scheduling Policy For Embedded System Domainvinod kapateNo ratings yet
- Proprietary Protocol of CISCO - Distance Vector Protocol - Metric Based OnDocument2 pagesProprietary Protocol of CISCO - Distance Vector Protocol - Metric Based Onvinod kapateNo ratings yet
- SteganographyDocument13 pagesSteganographyvinod kapateNo ratings yet
- Vibration ModelDocument32 pagesVibration Modelvinod kapateNo ratings yet
- Vehicle Tracking System Using GPSDocument72 pagesVehicle Tracking System Using GPSvinod kapateNo ratings yet
- Progress in Laser Propagation in A Maritime Environment at The Naval Research LaboratoryDocument10 pagesProgress in Laser Propagation in A Maritime Environment at The Naval Research Laboratoryvinod kapateNo ratings yet
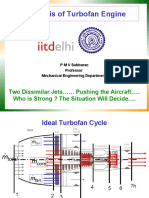
- Analysis of Turbofan Engine: Two Dissimilar Jets Pushing The Aircraft .. Who Is Strong ? The Situation Will DecideDocument29 pagesAnalysis of Turbofan Engine: Two Dissimilar Jets Pushing The Aircraft .. Who Is Strong ? The Situation Will Decidevinod kapateNo ratings yet
- Virtual Keyboard: Prepared By: Milind S. SalveDocument11 pagesVirtual Keyboard: Prepared By: Milind S. Salvevinod kapateNo ratings yet
- Development of Semiconductor Laser For OpticalDocument8 pagesDevelopment of Semiconductor Laser For Opticalvinod kapateNo ratings yet
- Optimum Layout For A Turbofan EngineDocument37 pagesOptimum Layout For A Turbofan Enginevinod kapateNo ratings yet
- Class 17Document36 pagesClass 17vinod kapateNo ratings yet
- The Very Light Jets (VLJS) Are Coming : Don Taylor March 18, 2005Document15 pagesThe Very Light Jets (VLJS) Are Coming : Don Taylor March 18, 2005vinod kapateNo ratings yet
- Manual Teensy 3.2Document1,377 pagesManual Teensy 3.2Roissmer Lanza100% (1)
- U-Boot Porting GuideDocument7 pagesU-Boot Porting GuideimioNo ratings yet
- Intel® Xeon® Scalable Processor Numbers and SuffixDocument5 pagesIntel® Xeon® Scalable Processor Numbers and SuffixEbrahim AlzubairiNo ratings yet
- Improving Intrusion Detection and Prevention System (Idps) Performance in An Ipv6 EnvironmentDocument12 pagesImproving Intrusion Detection and Prevention System (Idps) Performance in An Ipv6 EnvironmentAshagre MekuriaNo ratings yet
- MC56F8013Document126 pagesMC56F8013Asad AhmedNo ratings yet
- Es0206 stm32f427437 and stm32f429439 Line Limitations StmicroelectronicsDocument54 pagesEs0206 stm32f427437 and stm32f429439 Line Limitations StmicroelectronicsMorison MorgiaNo ratings yet
- Before You Start, You Should Prepare The Following ItemsDocument9 pagesBefore You Start, You Should Prepare The Following ItemsrubylnikNo ratings yet
- Brkarc 3003Document77 pagesBrkarc 3003Pepito CortizonaNo ratings yet
- 01-02 Common Stack OperationsDocument6 pages01-02 Common Stack OperationsYa KrevedkoNo ratings yet
- R12 Release NotesDocument49 pagesR12 Release NotesZahid.hasanNo ratings yet
- Nord Sound Manager English User Manual v6.7x Edition A-5 PDFDocument1 pageNord Sound Manager English User Manual v6.7x Edition A-5 PDFHans HeijmansNo ratings yet
- AC800MDocument16 pagesAC800Mvikashkumar.nitbNo ratings yet
- Chapter 7 Information System Managin The Digital Firm Fifteenth EditionDocument49 pagesChapter 7 Information System Managin The Digital Firm Fifteenth EditionAbdullahiNo ratings yet
- WINCC View SOLAR INVERTERDocument9 pagesWINCC View SOLAR INVERTERKhaled BellegdyNo ratings yet
- Allot NX Server Migration From Windows To LinuxDocument29 pagesAllot NX Server Migration From Windows To LinuxJenster ImarcloudNo ratings yet
- Getting Started With PicoDocument82 pagesGetting Started With PicoGeorge Cristian SercaianuNo ratings yet
- Cad Wor X Installation GuideDocument68 pagesCad Wor X Installation GuideRamuAlagappanNo ratings yet
- DellboomiDocument4 pagesDellboomiSakthivel PNo ratings yet
- MagicqDocument601 pagesMagicqsimoraicNo ratings yet
- U-336S User's Manual: ZyxelDocument159 pagesU-336S User's Manual: ZyxelJuan Diaz del VallinNo ratings yet
- ZFS Best Practices Guide - SiwikiDocument26 pagesZFS Best Practices Guide - SiwikidebugerNo ratings yet
- Mobile ComputingDocument13 pagesMobile ComputingJaisana BalamuruganNo ratings yet
- How To Recycle Unnecessary Catalog Tapes For Normal BackupsDocument4 pagesHow To Recycle Unnecessary Catalog Tapes For Normal BackupsamsreekuNo ratings yet
- Previous GATE Questions On Number SystemsDocument4 pagesPrevious GATE Questions On Number SystemshelithiNo ratings yet
- Basic Science and Engineering IT Literacy Class 4: SoftwareDocument4 pagesBasic Science and Engineering IT Literacy Class 4: SoftwareGopiKrishnaValireddyNo ratings yet
- Wireless Sensor Network Routing ProtocolsDocument25 pagesWireless Sensor Network Routing ProtocolsSandeep VermaNo ratings yet
- OlaVM 07 25Document63 pagesOlaVM 07 25isnullNo ratings yet
- TC3 Modbus TCP: ManualDocument58 pagesTC3 Modbus TCP: ManualN16064501陳琦No ratings yet
- 01-OWR571101 UPCC System Overview and Networking Introduction ISSUE1.00 PDFDocument88 pages01-OWR571101 UPCC System Overview and Networking Introduction ISSUE1.00 PDFJavier Orellana RivasNo ratings yet
- MandalaDocument3 pagesMandalaFarse CreedNo ratings yet