Download as pdf or txt
You might also like
- Highway Capacity Manual Update 2016 PDFDocument35 pagesHighway Capacity Manual Update 2016 PDFRezz-a Rezz100% (1)
- Designing Geodatabases for TransportationFrom EverandDesigning Geodatabases for TransportationRating: 4.5 out of 5 stars4.5/5 (2)
- Kolkatta Interior Designers & ArchitectsDocument16 pagesKolkatta Interior Designers & ArchitectsAditya Sharma100% (4)
- Transportation Research Part A: Valérie Guihaire, Jin-Kao HaoDocument23 pagesTransportation Research Part A: Valérie Guihaire, Jin-Kao HaoKaio AlmeidaNo ratings yet
- An Optimization-Based Decision Support System For Train SchedulingDocument35 pagesAn Optimization-Based Decision Support System For Train SchedulingAshish KumarNo ratings yet
- GLARE: Global and Local Wiring Aware Routability EvaluationDocument6 pagesGLARE: Global and Local Wiring Aware Routability Evaluation黃昭惠No ratings yet
- Line Planning2Document31 pagesLine Planning2Darlyn LCNo ratings yet
- Bottleneck Identification and Calibration For CorrDocument15 pagesBottleneck Identification and Calibration For CorrJenniffer Sidney Guerrero PradoNo ratings yet
- Bfa PresentationDocument17 pagesBfa PresentationA R P A N zNo ratings yet
- Desain Dan TeknologiDocument12 pagesDesain Dan TeknologiBagas TungkagiNo ratings yet
- Image-Processing Techniques Applied To Road Problems: Journal of Transportation Engineering January 1992Document23 pagesImage-Processing Techniques Applied To Road Problems: Journal of Transportation Engineering January 1992azedNo ratings yet
- Design of Public Transport NetworksDocument10 pagesDesign of Public Transport NetworksTuan Huy LeNo ratings yet
- Pavement Design ReserchDocument5 pagesPavement Design Reserchkhrizel lee tuazonNo ratings yet
- E Ciency Analysis of Public Transport Systems: Lessons For Institutional PlanningDocument10 pagesE Ciency Analysis of Public Transport Systems: Lessons For Institutional PlanningJCNo ratings yet
- Ajcea 8 3 4Document14 pagesAjcea 8 3 4Amul ShresthaNo ratings yet
- Real Options by Spreadsheet: Parking Garage Case ExampleDocument19 pagesReal Options by Spreadsheet: Parking Garage Case Examplegauravgoyal281No ratings yet
- 10 1 1 121Document35 pages10 1 1 121AjithRao MadarapuNo ratings yet
- Development of An Intelligent Public Transportation Management System On GPSDocument18 pagesDevelopment of An Intelligent Public Transportation Management System On GPSsoeasy191No ratings yet
- Appendix D Examples Users GuideDocument205 pagesAppendix D Examples Users Guidejhocape100% (1)
- Literature Review On Bus Rapid TransitDocument4 pagesLiterature Review On Bus Rapid Transitaflskdwol100% (1)
- A Practical Approach For Bus Architecture Optimization at Transaction LevelDocument6 pagesA Practical Approach For Bus Architecture Optimization at Transaction LevelAnh Tuấn TrầnNo ratings yet
- The Computer Aided System For Planning Efficient Routes: Purdue E-PubsDocument61 pagesThe Computer Aided System For Planning Efficient Routes: Purdue E-PubsMadhan ReddyNo ratings yet
- Dantas 2015Document6 pagesDantas 2015Almir FonsecaNo ratings yet
- Optimal Design of Water Distribution NetworksDocument14 pagesOptimal Design of Water Distribution NetworksAli Mohsen100% (1)
- Work Zone Queue Length & Delay Methodology (10-0112)Document18 pagesWork Zone Queue Length & Delay Methodology (10-0112)Mario SeguraNo ratings yet
- Rebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachDocument7 pagesRebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachSayani MandalNo ratings yet
- Expert SystemsDocument12 pagesExpert SystemsKunal JainNo ratings yet
- Design and Implementation of Discrete-Event Simulation Framework For Modeling Bus Rapid Transit SystemDocument9 pagesDesign and Implementation of Discrete-Event Simulation Framework For Modeling Bus Rapid Transit SystempitarachmanNo ratings yet
- Artificial Intelligence Techniques For Urban Traffic ControlDocument7 pagesArtificial Intelligence Techniques For Urban Traffic ControlJulio CésarNo ratings yet
- OptmizationTechniques Survey 2016Document12 pagesOptmizationTechniques Survey 2016Viviane FalcãoNo ratings yet
- Nhóm 6 - Hồ Nguyễn Phương Anh - IELSIU20252 - Thầy Phan Nguyễn Kỳ PhúcDocument13 pagesNhóm 6 - Hồ Nguyễn Phương Anh - IELSIU20252 - Thầy Phan Nguyễn Kỳ Phúcgiangtran.89224020022No ratings yet
- Optimal Design of Water Distribution Networks With GISDocument15 pagesOptimal Design of Water Distribution Networks With GISShiksha Chamilall100% (1)
- Emami Et Al 2022 Prioritizing Bus Routes For Electrification Gis Based Multi Criteria Analysis Considering OperationalDocument14 pagesEmami Et Al 2022 Prioritizing Bus Routes For Electrification Gis Based Multi Criteria Analysis Considering OperationalRoanaNo ratings yet
- Multiobjective Network Design For Emission and Travel-Time Trade-Off For A Sustainable Large Urban Transportation NetworkDocument20 pagesMultiobjective Network Design For Emission and Travel-Time Trade-Off For A Sustainable Large Urban Transportation NetworkSourabh JainNo ratings yet
- A Framework For Road Change Detection and Map UpdatingDocument6 pagesA Framework For Road Change Detection and Map UpdatingMochtar SulaimanNo ratings yet
- Micha Los 2015Document19 pagesMicha Los 2015Avinash KumarNo ratings yet
- Homoud 2017Document5 pagesHomoud 2017Mahfoud AMMOURNo ratings yet
- Neves Et Al 2021Document16 pagesNeves Et Al 2021Saymo Wendel de Jesus Peixoto VianaNo ratings yet
- Article Revision Report (AGD)Document18 pagesArticle Revision Report (AGD)FikeduNo ratings yet
- Review of Literature On Highway Project Benefit-Cost and Tradeoff AnalysesDocument28 pagesReview of Literature On Highway Project Benefit-Cost and Tradeoff AnalysesBosco WasikeNo ratings yet
- Panos Michalopoulos John Hourdos University of Minnesota - Civil Engineering Department February 28 2007Document46 pagesPanos Michalopoulos John Hourdos University of Minnesota - Civil Engineering Department February 28 2007Nadeem AhmadNo ratings yet
- Conveyor Profile DesignDocument6 pagesConveyor Profile DesignIrwan SattuNo ratings yet
- (Karen Beler Case Study I) - Transportation Planning ProcessDocument6 pages(Karen Beler Case Study I) - Transportation Planning ProcessKaren BeeNo ratings yet
- CTR Tti Misc YukselDocument99 pagesCTR Tti Misc YukselMahnooranjumNo ratings yet
- Optimized Bus Management System Through Analysing The Density of Bus Commuters and DelayDocument5 pagesOptimized Bus Management System Through Analysing The Density of Bus Commuters and DelayEditor IJRITCCNo ratings yet
- Project For The Promotion of Sustainable and Integrated Urban Development With The BRT Plan in Santa Cruz Metropolitan Area Management, BoliviaDocument20 pagesProject For The Promotion of Sustainable and Integrated Urban Development With The BRT Plan in Santa Cruz Metropolitan Area Management, BoliviaKevin Eduard ChavezNo ratings yet
- Planning of City Transportation Infrastructure Based On Macro Simulation ModelDocument6 pagesPlanning of City Transportation Infrastructure Based On Macro Simulation ModelAlsya MangessiNo ratings yet
- Delcan - Ottawa Rail System StudyDocument48 pagesDelcan - Ottawa Rail System StudyJohn NganNo ratings yet
- Reverse Engineering Methods Huy Brecht S 2018Document11 pagesReverse Engineering Methods Huy Brecht S 2018Louis V. TelémarkNo ratings yet
- AC A S T Gis D: Learinghouse Pproach To Haring Ransportation ATADocument16 pagesAC A S T Gis D: Learinghouse Pproach To Haring Ransportation ATAGiora RozmarinNo ratings yet
- Chistyakov Thesis 2017Document53 pagesChistyakov Thesis 2017til amrNo ratings yet
- BRT - Bus Rapid Transit Implementation in BeijingDocument6 pagesBRT - Bus Rapid Transit Implementation in BeijingFelipe FrutuosoNo ratings yet
- A Methodology For Generating Service Areas That Accounts For Linear BarriersDocument22 pagesA Methodology For Generating Service Areas That Accounts For Linear BarriersAbdul RahmatNo ratings yet
- Artículo 1 (Extraído de La Ieee Xplore)Document11 pagesArtículo 1 (Extraído de La Ieee Xplore)PepeNo ratings yet
- Development of A Hub and Spoke Model For Bus Transit Route Network DesignDocument10 pagesDevelopment of A Hub and Spoke Model For Bus Transit Route Network DesignHoras ManullangNo ratings yet
- Automating Utility Route Design and Planning Through GIS: Min-Yuan Cheng, Guey-Lin ChangDocument10 pagesAutomating Utility Route Design and Planning Through GIS: Min-Yuan Cheng, Guey-Lin ChangScientiapotentiaestNo ratings yet
- Caadria2021 055Document11 pagesCaadria2021 055Gil Randey Anak'e Mama'keNo ratings yet
- CMA For Signalized Intersections by Elena PrassasDocument28 pagesCMA For Signalized Intersections by Elena PrassasCarlos MensahNo ratings yet
- 1-Highway Planning 1Document38 pages1-Highway Planning 1Ashfaq NazirNo ratings yet
- Job at Planning, Design and Dimensioning Division and Project Hill Tracts'Document7 pagesJob at Planning, Design and Dimensioning Division and Project Hill Tracts'tanjibctg01No ratings yet
- Road Traffic Forecasting Recent Advances and New ChallengesDocument17 pagesRoad Traffic Forecasting Recent Advances and New ChallengesJouaultNo ratings yet
- Optimizing Bus Transit Network With Parallel Ant Colony AlgorithmDocument16 pagesOptimizing Bus Transit Network With Parallel Ant Colony AlgorithmKaio AlmeidaNo ratings yet
- Origin-Destination Estimation of Bus Users by Smart Card DataDocument16 pagesOrigin-Destination Estimation of Bus Users by Smart Card DataKaio AlmeidaNo ratings yet
- Transportation Research Part A: Valérie Guihaire, Jin-Kao HaoDocument23 pagesTransportation Research Part A: Valérie Guihaire, Jin-Kao HaoKaio AlmeidaNo ratings yet
- Barry 2009Document9 pagesBarry 2009Kaio AlmeidaNo ratings yet
- Planning and Analyzing Transit Networks - An Integrated Approach Regarding Requirements of Passengers and OperatorsDocument24 pagesPlanning and Analyzing Transit Networks - An Integrated Approach Regarding Requirements of Passengers and OperatorsKaio AlmeidaNo ratings yet
- The Object-Oriented Approach To Design: Use Case RealizationDocument62 pagesThe Object-Oriented Approach To Design: Use Case RealizationpearlkikNo ratings yet
- MMAN4400 Engineering ManagementDocument14 pagesMMAN4400 Engineering Managementaly viraniNo ratings yet
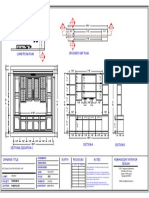
- Living Room Plan Crockery Unit Plan: Revisions North Drawing Title: NotesDocument1 pageLiving Room Plan Crockery Unit Plan: Revisions North Drawing Title: NotesJS TradersNo ratings yet
- Apostila Preparatória - Workshop de Psicologia Perinatal - 14wppDocument25 pagesApostila Preparatória - Workshop de Psicologia Perinatal - 14wppRose FalcãoNo ratings yet
- Ssarch ProfileDocument32 pagesSsarch ProfileSrianumanth naiduNo ratings yet
- Curriculum Development With Ed Technology Hand Outs PDFDocument25 pagesCurriculum Development With Ed Technology Hand Outs PDFLorenMelegritoNo ratings yet
- Ray2008 PDFDocument2 pagesRay2008 PDFMateus PinheiroNo ratings yet
- Applying Lean Thinking in An Educational Institute PDFDocument48 pagesApplying Lean Thinking in An Educational Institute PDFHumna AmjadNo ratings yet
- Short Description of The Measurements With The Transistor Tester Version 1.11kDocument9 pagesShort Description of The Measurements With The Transistor Tester Version 1.11kJose Oscar ManriqueNo ratings yet
- Prefabricated Enduring Composite Beams Based On Nnovative Shear TransmissionDocument35 pagesPrefabricated Enduring Composite Beams Based On Nnovative Shear TransmissionGinoNo ratings yet
- Product Design ProcessDocument17 pagesProduct Design ProcessAkhil VijayanNo ratings yet
- BP Subsea Realiability StrategyDocument25 pagesBP Subsea Realiability Strategyrize1159No ratings yet
- PN TN: 333 Nail RFXDocument2 pagesPN TN: 333 Nail RFXwill tingNo ratings yet
- Introduction To Employee Training and Development PPT 1Document8 pagesIntroduction To Employee Training and Development PPT 1Richa GargNo ratings yet
- Uae045 801 Ibd HR3 H25a GFL Se SDW 0436 00Document1 pageUae045 801 Ibd HR3 H25a GFL Se SDW 0436 00Mahmoud ElsmahyNo ratings yet
- Host Driver Logs CurrentDocument5,182 pagesHost Driver Logs CurrentjauziNo ratings yet
- 2.1. The Urban Design Process Part 1Document1 page2.1. The Urban Design Process Part 1Lyilr IndexiousNo ratings yet
- A New Epoch - Automated Design Tool For Mass-Customization of HousingDocument8 pagesA New Epoch - Automated Design Tool For Mass-Customization of HousingZull-Kefle IsmailNo ratings yet
- March Digital Arch TectonicsDocument2 pagesMarch Digital Arch TectonicssevanscesNo ratings yet
- Professional Engineering Work: January 2014Document21 pagesProfessional Engineering Work: January 2014Solomon AhimbisibweNo ratings yet
- Voltage Drop Analysis: 1250 kVA PP-6Document5 pagesVoltage Drop Analysis: 1250 kVA PP-6jenixson tamondongNo ratings yet
- Surigao Del Sur State UniversityDocument13 pagesSurigao Del Sur State UniversityCasey Maureen ArrezaNo ratings yet
- NTC Project KnitDocument8 pagesNTC Project Knitcpratyush9479No ratings yet
- BWDC Profile PDFDocument24 pagesBWDC Profile PDFAshish KumarNo ratings yet
- Mariveles, Bataan: A Proposed Seaport TerminalDocument12 pagesMariveles, Bataan: A Proposed Seaport TerminalMike Davin B. EstoquiaNo ratings yet
- Free PPT Templates: Insert The Subtitle of Your PresentationDocument48 pagesFree PPT Templates: Insert The Subtitle of Your PresentationJeffryNo ratings yet
- Inventaris Hardware Data Elektronik RSDocument1 pageInventaris Hardware Data Elektronik RSZanitsa NasifahNo ratings yet
- Soil Resources and Watershed Management ProgramDocument6 pagesSoil Resources and Watershed Management ProgramabdulazizNo ratings yet
- Pilot Plant Cost Estimating PDFDocument5 pagesPilot Plant Cost Estimating PDFvaraduNo ratings yet