Download as pdf or txt
You might also like
- Face Recognition Attendance Black BookDocument53 pagesFace Recognition Attendance Black Bookakshay yerawar100% (2)
- Fast Measurement: OptionDocument36 pagesFast Measurement: OptionNicolas RomeroNo ratings yet
- SQA Higher Mathematics Unit 2: SCHOLAR Study GuideDocument162 pagesSQA Higher Mathematics Unit 2: SCHOLAR Study GuideseamusNo ratings yet
- (Power Systems) Elena Fumagalli, Luca Lo Schiavo, Florence Delestre (Auth.) - Service Quality Regulation in Electricity Distribution and Retail (2007, Springer-Verlag Berlin Heidelberg) PDFDocument159 pages(Power Systems) Elena Fumagalli, Luca Lo Schiavo, Florence Delestre (Auth.) - Service Quality Regulation in Electricity Distribution and Retail (2007, Springer-Verlag Berlin Heidelberg) PDFkotiniNo ratings yet
- Music Similarity Measures For Interpolative Playlist GenerationDocument14 pagesMusic Similarity Measures For Interpolative Playlist Generationapi-27203679No ratings yet
- Solar Energy Control System Design: Sun YangDocument72 pagesSolar Energy Control System Design: Sun YangaliNo ratings yet
- Design and Implementation of A Real-Time Embedded ApplicationDocument57 pagesDesign and Implementation of A Real-Time Embedded ApplicationYishay EphraimNo ratings yet
- FULLTEXT01Document56 pagesFULLTEXT01Stefan NicolescuNo ratings yet
- Notes On Operating Systems: Dror G. FeitelsonDocument314 pagesNotes On Operating Systems: Dror G. FeitelsonESSIM DANIEL EGBENo ratings yet
- AE427 Lab 4 ReportDocument19 pagesAE427 Lab 4 ReportHIMANSHU VERMANo ratings yet
- I 000784520 ThesisDocument95 pagesI 000784520 ThesisSOUKAINA GHAZALINo ratings yet
- Metrics For Requirements Engineering: Mohammed Javeed AliDocument61 pagesMetrics For Requirements Engineering: Mohammed Javeed AliJo-Sharon UdohNo ratings yet
- Numerical Algorithms For Predicting Sports Results: Jack Blundell Computer Science (With Industry) 2008/2009Document70 pagesNumerical Algorithms For Predicting Sports Results: Jack Blundell Computer Science (With Industry) 2008/2009Davos SavosNo ratings yet
- FSR H8Document53 pagesFSR H8abdulsameteskiyayla632No ratings yet
- Drum-Boiler Control PerformanceDocument70 pagesDrum-Boiler Control PerformanceAli Almisbah75% (4)
- Rapidminer 6 Manual EnglishDocument118 pagesRapidminer 6 Manual EnglishtamiecristieNo ratings yet
- Computer Science ThreeDocument244 pagesComputer Science ThreeSteven TorresNo ratings yet
- Design and Implementation of A Web-Based Time Tracking SystemDocument54 pagesDesign and Implementation of A Web-Based Time Tracking SystemGuillermo EscobarNo ratings yet
- Control Engineering Exit Exam ModuleDocument55 pagesControl Engineering Exit Exam ModuleTsegaye GetachewNo ratings yet
- The Rational Unified ProcessDocument34 pagesThe Rational Unified ProcessZona TecnológicaNo ratings yet
- Undergraduate Thesis (Roger Willis)Document87 pagesUndergraduate Thesis (Roger Willis)rojeeee100% (2)
- Indian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427Document17 pagesIndian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427B RITHIKANo ratings yet
- GREER, David - DEng. - 2015Document155 pagesGREER, David - DEng. - 2015jorge garciaNo ratings yet
- ARL ThesisDocument128 pagesARL ThesisAnonymous x6EALQbJNo ratings yet
- Robot Arm ProjectDocument82 pagesRobot Arm Projectkeegan van den bergNo ratings yet
- Crazyflie Modelling PDFDocument147 pagesCrazyflie Modelling PDFAHMADNo ratings yet
- Advanced Testing of Systems of Systems Volume 2 Practical Aspects 1St Edition Bernard Homes Full ChapterDocument68 pagesAdvanced Testing of Systems of Systems Volume 2 Practical Aspects 1St Edition Bernard Homes Full Chapterray.strubbe795100% (9)
- Project Execution & Engineering Management Planning (PM)Document138 pagesProject Execution & Engineering Management Planning (PM)Noar Caesar100% (1)
- Dionex Autotrace 280 Spe Instrument Operator'S Manual: Document No. 065330 Revision 05 March 2020Document166 pagesDionex Autotrace 280 Spe Instrument Operator'S Manual: Document No. 065330 Revision 05 March 2020Hendy Dwi WarmikoNo ratings yet
- Master Thesis Report 1080Document93 pagesMaster Thesis Report 1080percyNo ratings yet
- 2015-17 WebDocument68 pages2015-17 WebRenaldiansyah GumayNo ratings yet
- Atoms PDFDocument56 pagesAtoms PDFLaclassedifabio FabioNo ratings yet
- Puulmann Cs 2014Document40 pagesPuulmann Cs 2014rovinj11No ratings yet
- Hemolyzer 3 PRO User ManualDocument69 pagesHemolyzer 3 PRO User Manualpeterford59.pf100% (1)
- Adityanigam Mtech ReportDocument56 pagesAdityanigam Mtech ReportAli AliNo ratings yet
- 2019 TFG Gómez IDSDocument236 pages2019 TFG Gómez IDSlets testNo ratings yet
- Brock Fazeli Arvand 2019Document66 pagesBrock Fazeli Arvand 2019sihasanNo ratings yet
- Book Dynamic IoDocument368 pagesBook Dynamic IoRaul Hernan Villacorta GarciaNo ratings yet
- PTM User ManualDocument122 pagesPTM User Manual1508kevinruizNo ratings yet
- Fellows L Dissertation 2008 9Document93 pagesFellows L Dissertation 2008 9Udit_Agarwal_4314No ratings yet
- SCTTheory TOCDocument64 pagesSCTTheory TOCrtyui78No ratings yet
- Wieringa Requirements Engineering - Frameworks For UnderstandingDocument467 pagesWieringa Requirements Engineering - Frameworks For UnderstandingitrejosNo ratings yet
- Stochastic Programming-1Document26 pagesStochastic Programming-1cqp1310No ratings yet
- Manual Mercury 5.0Document214 pagesManual Mercury 5.0japfxNo ratings yet
- Updated IndexDocument6 pagesUpdated IndexprajaNo ratings yet
- ASCET V6.4 Getting StartedDocument143 pagesASCET V6.4 Getting StartedcqlNo ratings yet
- Vapour-Compression AC System For JetlinersDocument86 pagesVapour-Compression AC System For JetlinersAmmoniaR717No ratings yet
- Workflow Performance EvaluationDocument158 pagesWorkflow Performance EvaluationFederico LeonNo ratings yet
- MIDImize Final ReportDocument77 pagesMIDImize Final ReportMário MesquitaNo ratings yet
- 0115 Notes On Operating SystemsDocument314 pages0115 Notes On Operating SystemsKennedy NgugiNo ratings yet
- Bedford's Law in Financial MarketsDocument78 pagesBedford's Law in Financial MarketsGerard CollaNo ratings yet
- Solar Tracker CompleteDocument40 pagesSolar Tracker CompleteFelix AlsonadoNo ratings yet
- OPUS Spectroscopic SoftwareDocument90 pagesOPUS Spectroscopic SoftwaremahyarbNo ratings yet
- Full Text 01Document77 pagesFull Text 01Allah1No ratings yet
- New Lab ManualDocument81 pagesNew Lab ManualHusam AbbasNo ratings yet
- Hendriks 2009Document128 pagesHendriks 2009ajo arveniaNo ratings yet
- ThesisDocument45 pagesThesisMd RashidunnabiNo ratings yet
- MPCDocument193 pagesMPCpbaculimaNo ratings yet
- Integrated and Participatory Water Resources Management - TheoryFrom EverandIntegrated and Participatory Water Resources Management - TheoryNo ratings yet
- Planetary Sciences: Earth and BeyondDocument27 pagesPlanetary Sciences: Earth and BeyondB RITHIKANo ratings yet
- GNR649 Lecture09 Internal StructureDocument29 pagesGNR649 Lecture09 Internal StructureB RITHIKANo ratings yet
- Planetary Sciences: Earth and BeyondDocument29 pagesPlanetary Sciences: Earth and BeyondB RITHIKANo ratings yet
- Processing of Aerospace Materials - Part I (ME-772)Document24 pagesProcessing of Aerospace Materials - Part I (ME-772)B RITHIKANo ratings yet
- Processing of Aerospace Materials - I (ME772) : Fracture Toughness and High Cycle Fatigue Date: 11 January 2022Document23 pagesProcessing of Aerospace Materials - I (ME772) : Fracture Toughness and High Cycle Fatigue Date: 11 January 2022B RITHIKANo ratings yet
- Processing of Aerospace Materials I (ME772) : Solid Solution Strengthening, Grain Boundary Strengthening SofteningDocument23 pagesProcessing of Aerospace Materials I (ME772) : Solid Solution Strengthening, Grain Boundary Strengthening SofteningB RITHIKANo ratings yet
- Processing of Aerospace Materials Part I (ME772) : Crystal Structures, Imperfections, Slip and Strain Hardening in MetalsDocument19 pagesProcessing of Aerospace Materials Part I (ME772) : Crystal Structures, Imperfections, Slip and Strain Hardening in MetalsB RITHIKANo ratings yet
- Processing of Aerospace Materials - I (ME772) : Phase DiagramsDocument25 pagesProcessing of Aerospace Materials - I (ME772) : Phase DiagramsB RITHIKANo ratings yet
- Processing of Aerospace Materials - Part I (ME-772) : Introduction, Aircraft Parts, Design Criteria 4 January 2022Document35 pagesProcessing of Aerospace Materials - Part I (ME-772) : Introduction, Aircraft Parts, Design Criteria 4 January 2022B RITHIKANo ratings yet
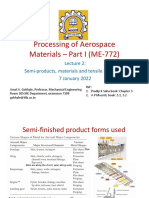
- Processing of Aerospace Materials - Part I (ME-772) : Semi-Products, Materials and Tensile Properties 7 January 2022Document19 pagesProcessing of Aerospace Materials - Part I (ME-772) : Semi-Products, Materials and Tensile Properties 7 January 2022B RITHIKANo ratings yet
- Indian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427Document17 pagesIndian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427B RITHIKANo ratings yet
- AE 427 Expt 4 grp5Document21 pagesAE 427 Expt 4 grp5B RITHIKANo ratings yet
- Indian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427Document13 pagesIndian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427B RITHIKANo ratings yet
- Indian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427Document22 pagesIndian Institute of Technology Bombay: Department of Aerospace Engineering Control Systems Laboratory - AE 427B RITHIKANo ratings yet
- Charpy Impact Test For Metallic Materials: Reference (Figure 1) Designation UnitDocument8 pagesCharpy Impact Test For Metallic Materials: Reference (Figure 1) Designation Unitrudra pratap singhNo ratings yet
- Chapter 12【Angular Momentum and Statics】Document28 pagesChapter 12【Angular Momentum and Statics】陳慶銘No ratings yet
- WavesDocument30 pagesWavesAli IbrahimNo ratings yet
- Zimbabwe School Examinations Council Physics 9188/1Document14 pagesZimbabwe School Examinations Council Physics 9188/1Laura MkandlaNo ratings yet
- PreRead ASPEN Hysys SoftwareDocument3 pagesPreRead ASPEN Hysys SoftwareMuhammad Akbar FahleviNo ratings yet
- JFET Characteristics PDFDocument9 pagesJFET Characteristics PDFSougata GhoshNo ratings yet
- Design and Material Optimization of Helical Coil SuspensionDocument17 pagesDesign and Material Optimization of Helical Coil SuspensionAnand PathakNo ratings yet
- A Review of The Surface Drives Employed For High Speed Planing Craft-EskafiDocument8 pagesA Review of The Surface Drives Employed For High Speed Planing Craft-EskafiJUNIOR OLIVONo ratings yet
- Ans Hist 362 Course Info 18a FinalDocument23 pagesAns Hist 362 Course Info 18a FinalTony NunezNo ratings yet
- Earman. Bangs, Crunches, Whimpers and Shrieks PDFDocument270 pagesEarman. Bangs, Crunches, Whimpers and Shrieks PDFDavid Prieto100% (1)
- 5th SemDocument17 pages5th SemSwaroop SomannaNo ratings yet
- Candidate 1 (Reservoir Engineering Panel) : ONGC SAMPLE INTERVIEW QUESTIONS (Based Upon Memory of Appeared Candidates)Document3 pagesCandidate 1 (Reservoir Engineering Panel) : ONGC SAMPLE INTERVIEW QUESTIONS (Based Upon Memory of Appeared Candidates)Neha AhiraoNo ratings yet
- Band Theory1Document136 pagesBand Theory1Bhagyashree PaniNo ratings yet
- SGMS Move ChangesDocument5 pagesSGMS Move ChangesJeffNo ratings yet
- Rotational Motion: Imran Mirza (AS/A Level Physics) +92 3336515500Document9 pagesRotational Motion: Imran Mirza (AS/A Level Physics) +92 3336515500Neural Spark Physics CieNo ratings yet
- Development of Car For Eco-Marathon: Aksel QvillerDocument74 pagesDevelopment of Car For Eco-Marathon: Aksel QvillerJoshua sam jNo ratings yet
- Venturi Flowmeter Specification Sheet: Venturi Meter GAH Downstream Design Data DimensionsDocument1 pageVenturi Flowmeter Specification Sheet: Venturi Meter GAH Downstream Design Data Dimensionshardik033No ratings yet
- Contact: 9738237960: Five Mark QuestionsDocument50 pagesContact: 9738237960: Five Mark QuestionsDk249No ratings yet
- FULLTEXT01Document210 pagesFULLTEXT01Mohamed TarekNo ratings yet
- Technical Seminar DocumentDocument30 pagesTechnical Seminar DocumentShashi kanthNo ratings yet
- N Forgings Energy Audit Final ReportDocument21 pagesN Forgings Energy Audit Final Reportbulusu kanthNo ratings yet
- Calculation For Stored EnergyDocument1 pageCalculation For Stored EnergySubbarayan Saravanakumar67% (3)
- Earth and Life Science 5-6Document3 pagesEarth and Life Science 5-6Meryl LinesesNo ratings yet
- Home Assignment - 1Document2 pagesHome Assignment - 1chaitanyaNo ratings yet
- PEEKDocument2 pagesPEEKHugorong WongNo ratings yet
- Lab Manual - New-NSMDocument33 pagesLab Manual - New-NSMsudhir.more0% (1)
- ch16 OnlineDocument39 pagesch16 OnlineSlayer 45073No ratings yet
- Maria Assumpta Convent Sr. Sec. School, Kashipur SESSION 2020-21 Term - 1 Syllabus Class - XDocument2 pagesMaria Assumpta Convent Sr. Sec. School, Kashipur SESSION 2020-21 Term - 1 Syllabus Class - XShubham PapnaiNo ratings yet
- Nastran Cquad4 V CquadrDocument18 pagesNastran Cquad4 V Cquadrrrmerlin_2No ratings yet
- A. Mercury: Which Is The Outermost Planet in The Solar System?Document732 pagesA. Mercury: Which Is The Outermost Planet in The Solar System?Razia KanwalNo ratings yet