Professional Documents
Culture Documents
Development of A Digitally-Controlled 3-Axis Earthquake Shake Table
Development of A Digitally-Controlled 3-Axis Earthquake Shake Table
Uploaded by
Huzaifa U FarooqOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Development of A Digitally-Controlled 3-Axis Earthquake Shake Table
Development of A Digitally-Controlled 3-Axis Earthquake Shake Table
Uploaded by
Huzaifa U FarooqCopyright:
Available Formats
1
Development of a Digitally-Controlled 3-Axis Earthquake
Shake Table1
S. Ammanagi, V. Poornima, A. Sera,
and R. Sunder2,
TestResources Asia Pacific (BiSS Research) 41A, 1A Cross, AECS 2 nd Stage, RMV Extn.
Bangalore 560 094, India. e-mail: r.sunder@vsnl.com
An 8-actuator shake table was developed for evaluating specimen
response under conditions that closely simulate actual
earthquakes. The system contains a number of unique hardware
and software features that considerably reduce the cost of
earthquake simulation testing. These include single-ended actuator
assemblies, contamination insensitive servo-hydraulics and a
robust DSP-based control and data acquisition system. Tests to
simulate a number of 3-axis earthquake time histories appear to
suggest satisfactory table response.
Keywords: 3-axis shake table, earthquake simulation, multi-channel
servo-control.
INTRODUCTION
Civil constructions and engineering structures are designed to withstand a
variety of operational loads and environmental conditions over decades of safe
and economic usage. Earthquakes are part of this environment. Apart from
destruction of life and property, they can have serious indirect consequences.
Quake-induced damage to the controls of a nuclear power reactor may lead to
meltdown with catastrophic consequences. Advances in numerical simulation
permit virtual rendering of different scenarios in order to minimize the hazards
associated with earthquake-related mishaps. However, the complex nature of
material and system response combined with a variety of potential failure
modes, restrict the reliability of virtual simulation. Regulatory authorities
therefore stipulate tests on real structures and components under simulated
conditions of concern to validate structural integrity.
A structure in the vicinity of an earthquake will experience random vibrations
caused by the movement of its foundation. One may assume similar response
if the base of the structure is shaken in a laboratory environment using the
acceleration – time history recorded during the earthquake. By the same token,
laboratory reproduction of associated displacement – time history would also
have the same effect. This is the basis for the application of 3-axis shake tables
to earthquake simulation.
A single-axis shake table that can handle a test payload of about 1,000 Kgs
costs about $120,000 and can be readily purchased in the global market. A 3-
1
Submitted to Current Science, Jan 2005.
2
Author names appear in alphabetical order. Correspondence on this paper may be addressed
to r.sunder@vsnl.com.
PDF created with pdfFactory Pro trial version www.pdffactory.com
2
axis earthquake shake table for the same payload may cost much more than
$1,000,000. National laboratories (including a few in India) set aside as much
as $5,000,000 or more to set up earthquake test facilities. Even this amount
may be a small fraction of the investment made on the development of the
world’s largest 1,200 ton shake table in Japan1.
The disproportionate difference in cost between single and 3-axis shake tables
represents a stumbling block in the progress of earthquake engineering
research and its application to structural integrity. More expensive testing
increases the installed cost of safety-critical equipment. Thus, the tax payer
eventually bears the burden by paying more for related products and services
including nuclear power.
The exhorbidant cost of test equipment and questions regarding even the
accessibility of this technology make it imperative to seek alternatives. The
team at BiSS Research was motivated by this opportunity and embarked on an
in-house and internally funded R&D effort in 2003 to come up with a country-
specific solution to 3-axis earthquake testing. This paper decribes the
development of the country’s first indigenous 3-axis earthquake shake table.
This facility was recently installed at the Indian Institute of Science as part of
the National Programme on Education in Earthquake Engineering (NPEEE).
Table 1 summarizes the specifications of the same.
Description Value
Table size (m) 1×1
Table mass (kg) 170
Maximum specimen mass (t) 0.5
Maximum specimen height (m) 0.5
Controlled degrees of freedom 6
Translation X, Y and Z
Longitudinal (X) or Lateral (Y)
± Displacement (mm) 220
± Velocity (m/s) 0.57
± Acceleration (g) – Full payload 2.0
Vertical (Z)
± Displacement (mm) 100
± Velocity (m/s) 0.57
± Acceleration (g) – Full payload 2.0
Table 1. Specifications of the shake table installed at IISc.
PDF created with pdfFactory Pro trial version www.pdffactory.com
3
The next section explains the concept behind 3-axis earthquake simulation.
This is followed by the description of the different components that make up
the test system. Sample test results from simulation of actual 3-axis earthquake
histories recorded in El Centro (California), Kalamata (Greece) and Chi Chi
(Taiwan) are shown to compare favourably with data from overseas test
centres2. Problems faced during development and scope and implications of
future work are described.
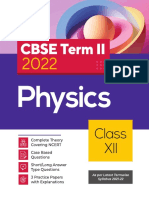
Concept of 3-Axis Earthquake Shake Table
Fig. 1 The concept behind a 3-axis shake table for earthquake simulation. The
position of plane ABC in space is adequately represented by the spatial
coordinates of ABC.
Consider a plane represented by the triangle ABC shown in Fig. 1. It may also
be viewed as a shake table uniquely positioned in space, whose position and
orientation are uniquely defined by the spatial coordinates x, y, z of points A,
B, C. The table’s 3-axis translational, or, rotational movement, or, a
combination of the two can be uniquely defined by a set of nine equations that
describe variation of x, y and z versus time, for the points A, B and C.
Fig. 2 Schematic of the underlying concept behind a Stewart table3.
PDF created with pdfFactory Pro trial version www.pdffactory.com
4
Let us now consider the same table ABC “fastened” through straight and
flexible links (the equivalent of telescoping legs on a camera tripod) to fixed
points D, E, F, G, H and I as shown in Fig. 2a. As seen in Figs 2b,c, these six
points are on the stationary ground plane, while the table ABC is free to move
as shown in translational motion (Fig. 2b,c) or rotational as in Fig. 2d. The two
‘stretchable’ legs AD and AE connect point A to ground, while BF, BG and
CH, CI likewise connect points B and C respectively, to ground. Note that
these legs can only extend or retract. They cannot flex.
If the table is moved to any desired point within the above envelope,
instantaneous length of each of the six legs is readily computed from the
spatial coordinates of points A-I. Conversely, table position is uniquely
defined by the lengths of the six legs. This is the operational concept behind
the so-called Stewart table3.
Stewart tables are used in a wide range of applications from flight simulators
to entertainment centers, where riders can experience the simulated feel of a
horse ride, a boat ride, or an enlivening feeling of simulated movement while
watching an action movie. A Stewart table is mounted on six servo-controlled
linear actuators whose individual strokes determine table position.
Servo-control is employed to ensure precision extension or retraction of the
actuator rod. A transducer such as an LVDT provides continuous rod position
feedback. The difference between required and actual position drives a servo
that will move the rod in the direction that will reduce this difference. A more
detailed discussion of servo-control will be forthcoming.
Stewart tables of low and moderate performance and payload typically use
linear-electric actuation. The rest are servo-hydraulic. Among the several
advantages of servo-hydraulic actuation are high instantaneous energy
availability that permits unmatched force and performance ratings. Also,
servo-hydraulics can achieve direction reversal specifications that cannot be
matched by electrical drives. It is not surprising therefore that earthquake
shake tables are typically driven by servo-hydraulics.
Fig. 3 Stewart table technology demonstrator developed at BiSS Research
Fig. 3 shows a prototype Stewart platform developed at BiSS. This was the
original design proposed for the IISc project. Though it was operational in
2003 and capable of all the movements associated with earthquake simulation,
it was eventually discarded in favour of the ‘classical’ design described below.
PDF created with pdfFactory Pro trial version www.pdffactory.com
5
However, this was a crucial first step in indigenous earthquake simulator
development. All the building blocks required for the IISc project were
developed, tested and fine tuned on the BiSS Stewart table. These included the
hydraulic pump and piping, the servo-actuator assemblies and most
importantly, the multi-channel control hardware and software at the heart of
multi-axis earthquake simulation technology.
The BiSS Stewart table demonstrated capability to synchronously control
dynamic motion of multiple actuators with real-time digital servo-loop update
of 8 kHz, incorporating required multi-channel control waveform generation,
data acquisition, safety interlocks, etc. In doing so, several technological
problems had to be overcome, many of which have been discussed in the
literature2, 4-7, while some haven’t.
Stewart tables are equally capable of both translational as well as rotational
motion. Translational movement typically dominates earthquake spectra. In
earthquake simulation applications, the rotational capability of the Stewart
table is not fully exploited. This may explain why Stewart tables are not used
in earthquake simulation2.
The significance of cumulative oil flow to drive the servo-hydraulic actuators
that move the table needs to be underscored. The amount of oil required to
move the table will determine energy consumption. About 200 KVA is
required to drive the pump on a shake table of payload capacity of 1,000 Kg. It
would follow that a 100 ton shake table of conventional design would
consume 10% of the power generated by one of the units of the Kalpakkam
nuclear power station. This gives a measure of the significance of energy
considerations in designing a shake table – a question of particular relevance
when contemplating earthquake testing in conditions of power scarcity and
one, that is a major concern in countries like India. This was a major design
driver in developing the BiSS shake table at IISc.
3-Axis Earthquake Shake Table at IISc
The schematic of a classical 3-axis earthquake shake table appears in Fig. 4.
Most tables around the world use this configuration. This was the design
adopted for the IISc project. Unlike the Stewart table, it carries actuators
aligned along the three directions of potential table movement. Thus, we have
two actuators each, aligned along the X and the Y-axis and four positioned
along the Z (vertical) axis. These four resemble the legs of a table.
The horizontal actuators along X and Y-axis are placed in opposing
configuration. This enhances control of table rotation without compromising
translational movement capability.
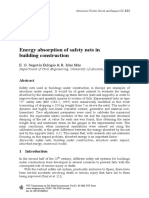
Fig. 5 shows a photograph of the IISc table installation. The table and actuator
assembly are mounted on a reinforced concrete foundation that is isolated
from the laboratory floor. Table position is more or less level with the
laboratory floor to facilitate payload location. A unique feature of the facility
is that the entire hydraulic drive including pump and accumulators are housed
within the pit, making it extremely compact and easy to maintain, apart from
cost savings by avoiding additional enclosures, piping, substations, etc. A
single catering manifold with oversize flow sections and 60 L accumulator
PDF created with pdfFactory Pro trial version www.pdffactory.com
6
charge is located right under the table (seen in Fig. 5) to connect the pressure
and return line hosing to the eight actuators around it.
Fig. 4 Schematic of 8-actuator shake table for 3-axis earthquake simulation. Four
vertical actuators (5-8) are shown in red. X-axis movement is provided by
actuators 1, 2 (blue), while actuators 3, 4 (brown) provide Y-axis movement.
Any table movement including translation and rotation will demand a certain
precise movement of all 8 actuators.
All eight actuators are mounted with 24 lpm contamination-insensitive direct-
drive (DDV) Bosch servo-valves that provide for a maximum table velocity of
0.6 m/s in any single direction and up to 0.85 m/s along a diagonal. Thus, the
maximum possible cumulative flow would be 192 lpm. However, under actual
earthquake spectra, required flow is unlikely to exceed about 90 lpm as table
movement is largely restricted to the horizontal direction and also considering
that maximum flow requirement during actuator rod retraction reduces by
about 35%. Keeping these in view, the facility was equipped with a 65 lpm
servo-controlled variable frequency pump. This feature saves power in two
ways: by avoiding excess oil flow altogether and further, by avoiding power
consumption to cool the excess oil thus heated. Energy consumption for the
entire facility reduces to less than 10 KVA under idling conditions and peaks
at about 40 KVA during those few moments that the pump needs to deliver its
peak flow of 65 lpm. An added benefit is the reduced pump noise, as a result
of which, the pump unit is located right by the side of the shake table and not
in a separate noise-proofed enclosure as is the case in conventional facilities.
The 60 L accumulator charge satisfies any instantaneous flow requirements
apart from suppressing cross-talk between actuators due to local pressure
fluctuation. This combined with the 65 lpm pump flow have been found to be
adequate to simulate typical earthquake spectra available from the literature.
One may speculate that the IISc shake table design may be amongst the most
energy efficient solutions for a given payload capacity and performance
envelope.
PDF created with pdfFactory Pro trial version www.pdffactory.com
7
Fig. 5 8-actuator 3-axis earthquake shake table being installed at Civil Engineering
Department, Indian Institute of Science, Bangalore. Blue arrows point to
visible table-end mounting points of actuators, while brown arrows point to
base end.
The table as shown in Fig. 5 is of 1000x1000 mm size and designed for a
payload of up to 500 kg that can bolted down rigidly for the experiment. The
four horizontal actuators are of +/-250 mm stroke, while the four vertical
actuators carry +/-150 mm stroke. Thus, the table can move in excess of 450
mm along the X and Y axis or almost 700 mm along the diagonal. This stroke
range compares favourably with most tables described in the literature and
exceeds that of any in India.
Conventional shake tables use two-stage servo-valves, which by nature, are
extremely sensitive to contamination. The actuators on the IISc shake table are
driven by Direct-Drive Servo-valves (DDVs). Over the years, it has emerged
that DDVs are best suited to Indian operational environment that is
characterized by dust, dirt and relatively rough handling. With relaxed
filtration requirements and zero maintenance the DDV solution increases
reliability at reduced cost.
Servo-Actuator Design
Meeting the specified stroke range was one of the major challenges of this
project. The challenge was compounded by the low specified payload of 500
Kg, raising issues related to lateral stiffness and potential buckling. These
were inevitable because extra stroke means extra length and reduced force
rating means reduced cylinder and rod cross-section.
Most conventional servo-actuator assemblies are double-ended. This means
that the actuator rod extends out of the head at either end of the cylinder. In
such designs, the rod itself is hollow in order to house a displacement
PDF created with pdfFactory Pro trial version www.pdffactory.com
8
transducer that will continuously sense rod position. Also, double-ended
actuators are equal section, meaning, that extension in either direction requires
the same amount of oil flow. This ensures identical actuator response in
extension and retraction and also, identical force rating in both tension and
compression. However, for a given stroke range, a double-ended actuator
would be much longer than a single ended actuator, typically, at least 50 to
60% more in length. This is in order to accommodate the length of the rod
protruding out of the opposite end and also to house the body of the LVDT
transducer.
In order to reduce actuator length, we chose single-ended, double acting
actuator design, where the effective cross-section on either side of the piston is
unequal. In compression, they develop a force of 15 kN, while in tension, the
rating drops by about 40%. As noted above, this also implies unequal servo-
response in tension and compression, essentially meaning that in compression,
actuator movement will be 40% more sluggish than in tension given constant
servo-gain settings. This problem was overcome by suitable changes to the
digital servo-loop control algorithm in order to render actuator response
identical in both directions.
The disparity in tension versus compression force rating was not a limitation
for the horizontal actuators because of the reserve in force capacity built into
the system. For the vertical actuators, the disparity actually turns into an
advantage considering that in vertical motion, one has always to contend with
1 g load acting downwards due to gravity – it does help to have a greater force
rating in compression, which single-ended actuators do by design.
The single-ended actuators, being shorter, are better equipped to withstand
compressive loads. A fundamental assumption in shake table design is that all
actuators only see axial loading. This is guaranteed by ensuring 3-DOF
freedom of rotation at either mounting end using suitable spherical joint
bearings. Any violation of this assumption due to fouling at extreme positions
or bearing seizure is likely to cause side loads that will damage actuator seals.
Unfortunately, one still needs to contend with inevitable side loads induced by
lateral oscillation of the actuator.
During horizontal table movement in the X or Y-axis, two actuators will
remain stationary (only their rods will extend or retract), while the remaining
six actuators will see negligible rod movement, but considerable lateral
oscillation. During vertical table movement, the four vertical actuators will
remain stationary, while all four horizontal actuators will see considerable
lateral oscillation. The inertia loads due to lateral oscillation will be borne by
the actuator assembly and be seen as side loads on the seals and bending
moments, tending to flex the actuator assembly. In order to minimize this
component, the actuators are equipped with light-weight Al-alloy heads.
Besides, the servo-valve service manifold is located at the base of the actuator,
where, oscillation is minimal because of reduced radius. Besides, electrical
cabling and hose connections to the manifold will also be naturally protected
from vibrations.
All the above measures contributed to a high-stroke, high performance table of
relatively low payload. Initial experience suggests that the rig itself, including
hydraulics and servo-actuators withstand the consequences of continuous
movement and oscillation during earthquake simulation testing. However,
under harmonic vibrations exceeding 15 Hz, there appears to be a tendency for
PDF created with pdfFactory Pro trial version www.pdffactory.com
9
the actuators to approach lateral resonance and the associated visible increase
in lateral deformation of the actuator assembly. One may assume that this
remaining problem will automatically disappear in future designs through
increase in table payload or reduced stroke, or a combination of the two. This
is one reason why building a table of larger capacity may in fact be easier.
The eight-actuator configuration may appear to be best suited to earthquake
simulation. However, it has its disadvantages. For a start, it requires eight
servo-actuators as opposed to six for the Stewart table. This implies a 30%
increase in hardware cost including real-time controls. An even more serious
problem is associated with structural response constraint imposed by the two
additional actuators.
The Problem of Structural Constraint
Consider the case of a four-legged table as opposed to a tripod. The stability of
a tripod is not affected by small differences in the length of its legs. In
contrast, a four-legged table with the same problem would be unstable,
requiring the shims one inserts under the shorter leg to keep the table steady.
An imperfect table or floor leads to the table being wobbly as one of the legs
momentarily loses contact with the floor. Imagine for a moment the prospect
of the four legs being rigidly fastened to the floor. In this event, any
imperfection would lead to proportional internal forces within the table.
Equilibrium will demand a combination of stretching of one or two legs,
compression of the others and flexing of the table surface itself. If table
stiffness is negligible, the forces developed will also be negligible in view of
decreased resistance to bridge the geometric imperfections. However,
earthquake shake tables are designed to be extremely stiff. As a consequence,
any error in positioning one or more actuators, or, any error in spatial
coordinates, or, a combination of the two, will cause extreme loads – even if
there is no payload on the table. Individual servo-actuators on an earthquake
simulator can thus see very high forces caused exclusively by geometric errors
in their movement, or in computed coordinates.
The above forces are induced by structural constraint, are independent of
payload and appear unavoidable in engineering practice. They will have a
static component associated with error under static conditions. In addition,
they will also have a dynamic component due to instantaneous errors during
table movement. Given the high stiffness of the hardware, one may assume
that these forces will be determined by the combination of two significant
parameters. These are actuator position, as it determines oil volume in the
cylinder along with its stiffness, and, position error, as it determines oil
pressure in the cylinder as driven by accumulating oil. The latter is driven by
instantaneous position error and servo-gain settings. These two components
from all eight actuators will interact with each other and also with the inertia
component from table and payload to induce undesirable vibrations and loss of
payload capacity.
Stewart tables will not face the above problem because, for any position of
each its six actuators, there will be a unique position of the table. However, in
eight-actuator earthquake shake tables, the reverse applies: a unique
combination of the extension of the eight actuators is essential for a given
table position. As structural constraint inhibits geometric adjustments to
overcome errors, position errors will necessarily translate into internal forces.
PDF created with pdfFactory Pro trial version www.pdffactory.com
10
These forces impose undesirable cross-talk between actuators that can lead to
a visible “trembling” of the table as it moves, or sometimes, even when
stationary, as the actuators literally work against each other2, rather than
together. The problem turns particularly frustrating when it combines with oil
column resonance to magnify the effect of even small position errors. Note
that internal forces can by themselves cause position errors even in those
actuators that would, in free condition, move without error. Combine this with
the prospect of variable actuator stiffness as a function of rod extension (due
to variable oil volume) and the problem becomes even more formidable.
In case of the Stewart table as shown in Fig. 2, table position in space is
determined by the coordinates of the six base points D-I and the lengths of the
six links connecting these points to A, B, C. Any error in these dimensions
will (only) translate to a proportional error in table position and orientation.
In the case of the 8-actuator earthquake shake table, one has to deal with the
spatial coordinates of the eight mounting points of actuators combined with
the assembled variable length of each of eight actuators. Engineering
implementation of these is determined by geometric tolerances in civil
engineering associated with the base structure as well as the machining and
assembly level dimensional tolerances. The distance between the actuator
mounting points is determined by the cumulative length of the bearings at the
two ends, the threaded connectors between the mounts and the actuator and
the length of the actuator itself. These together, will contribute to a systematic
error in spatial coordinates.
In Fig. 5 showing a photograph of the table installation at IISc, the blue arrows
point to the visible table-end mounting points of the actuators, while the
brown arrows show the base-end mounting points. This picture illustrates how
difficult it may be to translate into engineering practice, dimensional
tolerances as envisaged by the drawings. This problem was resolved by
introducing flexibility into the software for adjusting actual dimensions at
system set up and incorporating those into the application software.
Link length (distance between actuator mounting points) is controlled by
actuator rod extension. Position error caused by this component will be the
sum of position transducer feedback error and servo-control error (difference
between desired and actual rod position during table movement). Transducer
feedback error comes from scale, offset and linearity components that
theoretically accrue from errors in transducer response and noise in electronics
and data acquisition. Analog transducers are used to sense actuator position.
Their specifications are related to full-scale. Thus, measurement error as well
as signal noise will increase with stroke range.
A process was established for iterative correction of spatial coordinates of
fixed base mounting points, length of actuator assemblies (that can change
depending on threading coverage on connectors) and feedback transducer
calibration as well as linearization. This process takes several hours and must
be repeated each time any actuator assembly is replaced or relocated on the
test rig.
PDF created with pdfFactory Pro trial version www.pdffactory.com
11
Fig. 6 Control cabin (background) and pit with shake table (foreground). Controller
containing all the electronics and DSP (1) and host computer (2) for the test
facility.
One of the challenges of this project was of meeting large stroke requirements.
The specification called for +/-250 mm stroke. Most earthquake shake tables
employ stroke of up to +/-150 mm. We were thus faced with the prospect of
near doubling of position error at the outset, with the attendant physical
constraint – induced problems highlighted already. Another problem is
erroneous transducer output caused by unavoidable lateral vibrations. In an
attempt to minimize this, special guides were introduced to restrict transverse
vibration of the LVDT core. Errors were further reduced through careful cable
routing and custom signal conditioning. All these measures contributed to
improved transducer response beyond the specified limits of the transducer.
Typical actuator position errors in actual testing were of the order of 0.05 mm.
General laboratory instrumentation employs active filters with low cut off
frequency to improve the quality of acquired data. The ability to do this on
transducers that serve as servo-feedbacks is limited by the very nature of
servo-control. Filtering in instrumentation is accompanied by phase lag and
this can adversely affect servo response by adding to the servo phase lag and
thereby limiting servo response. Therefore, even though limit frequency of the
table was set to 50 Hz, the 8-pole filter cut-off frequency on actuator stroke
feedback was set at 2 kHz.
All the above measures helped reduce real-time table position error down to
less than 0.3 mm under static table positions at different points on the spatial
table movement envelope. Bringing position error to within this margin
relieves internal forces. This was confirmed by free rotation of all eight
PDF created with pdfFactory Pro trial version www.pdffactory.com
12
actuators at any table position at high hydraulic pressure as an indication that
abnormal internal loads were absent.
A digital rendering of conventional PID control scheme was initially
employed for servo control. All eight-actuators were independently servo-
tuned with rod-end disconnected from the table. The table was then connected.
While there appeared to be no problem under static conditions, initiation of
any table movement invariably caused a certain trembling of the table, which
sometimes appeared to multiply by resonance. It was thus apparent that the
problem of structural constraint imposed by the 8-actuator solution needs to be
subdued under dynamic conditions. And obviously, conventional PID control
scheme was not adequate for the purpose. A new real-time control algorithm
was developed, whose description is forthcoming.
Control and Data Acquisition Scheme
The BiSS 2350 Open Architecture Digital Signal Processor (DSP) based
controller was employed as the control and data acquisition system for the
shake table. The unit is built around a TMS 3205402 100 MIPs 16-bit DSP
and 8 independent channels of 16-bit analog codecs I/O at up to 22 kHz. The
2350 controller includes a motherboard with a bus onto which up to six plug-
in cards can be connected. The motherboard contains all the basic hardware
required to connect to power drives including servo-hydraulics, digital I/O
drives to control and monitor external devices and a watchdog timer for
emergency shut down in the unlikely event of a system crash. The plug-in
cards contain signal conditioning and provision for acquisition of additional
signal channels. This makes the 2350 an open architecture platform, where
hardware can be configured using readily available building blocks to suit
most specific requirements including the shake table. This is an important
ingredient for cost-effective future support and upgrade of a variety of test
systems including the IISc facility.
For the IISc shake table, the 2350 controller is configured with 24 channels of
analog data acquisition along with eight channels of control waveform
generation and LVDT signal conditioning in order to control and track table
movement. Remaining channels are connected to BiSS MEMS accelerometers
mounted at different locations on the table to track 3-axis acceleration history.
The 2350 controller is housed in a box the size of a desktop PC. It is
connected to an industry standard PC on an MS-Windows platform. As seen in
the photograph that appears in Fig. 6, this is an extremely compact control and
data acquisition unit for a 3-axis seismic test facility. Our rationale was that
rather than intimidate the end-user with a plethora of controls and indicators,
an ergonomic environment would be conducive to creative and imaginative
experimental research on the subject.
Shake table operation is controlled by two CPUs working together in real-
time. The DSP on the 2350 controller performs true real-time operations
including data acquisition across 24 input channels, set point generation and
32-bit digital servo-loop update computations, digital I/O sense and real-time
monitoring of multiple safety interlocks, primarily related to limit position of
the servo-actuators. Servo-loop update is performed at 6 to 8 kHz on each of
the actuators, which compares favourably with most single channel systems in
the market.
PDF created with pdfFactory Pro trial version www.pdffactory.com
13
The embedded real-time code running on the DSP is downloaded at start-up
time from the PC through a USB cable. The same interface is used for real-
time data transfer during table operation.
The application program running on the PC operates in real-time, but is
asynchronous with respect to the shake table. Thus, while the 2350 clocks its
own operations strictly in sync with the 6 to 8 kHz loop update schedule, the
application program on the PC exchanges data packets with the controller at
not more than 2-5 Hz. Ring buffers at both ends bridge the time difference
between the two. This relaxes real-time demands on the PC and the
application software can therefore operate in the MS-Windows time-sharing
environment that most users are comfortable with.
Like the hardware, the application software too was built around the open
architecture concept. Thus, building blocks already developed for n-channel
actuator control and data acquisition in other applications, were put together
for earthquake simulation. The software was developed on the National
Instruments Lab-Windows CVI platform in C language. This platform
provides a variety of graphic user interfaces that are suited for laboratory
automation.
A custom earthquake shake table application was developed to meet specific
requirements of shake table operation. This includes code for transformation
of table position to actuator rod extension (referred to as inverse kinematic
problem2), transformation of actuator position readouts to table position
(referred to as direct kinematic problem) and real-time control waveform
generation for 3-axis table translation in harmonics or in accordance with
available or synthesized 3-axis earthquake displacement-time histories.
Transformation process was also set up to convert acceleration and velocity
time histories to displacement-time history, which is the mode of control of
the shake table.
Finally, the PC-application software includes display and recording routines to
observe and collect data on actual table response including outputs from the 16
additional data acquisition channels including accelerometer outputs.
The features described above constitute a rudimentary framework to permit 3-
axis seismic testing closely simulating actual earthquakes. Code development
is currently in progress to implement 3-axis rotational table movement.
Addition of this code will not burden the real-time control process because the
latter is focused on actuator tracking alone. By implication, performance of the
real-time software already in place will not be affected by the complexity of
future table movement requirements, provided they fall within the known
performance envelope of the system.
Finally, one may note that multiple 2350 controllers can be connected to the
USB bus for modular expansion of system data acquisition capability. This
will enable testing of larger structural assemblies incorporating multipoint 3-
axis accelerometers and strain bridges.
Servo-Control Algorithm for 8-Actuator Shake Table
Most conventional servo-hydraulic actuators are controlled by the classical
PID scheme. The P (proportional) component is given by the product of P-
gain and instantaneous loop error. Loop error is the difference between
required and achieved feedback readout. The I-component is the product of I-
PDF created with pdfFactory Pro trial version www.pdffactory.com
14
Gain and the error function integrated over a time interval representing system
time constant. The D-component is the product of D-Gain and derivative of
the error versus time function. The P-component is typically adequate in many
quasi-static applications. The I-component improves system dynamic response
and the D-component serves as mass compensation by attenuating system
response to avoid oscillations associated with hunting.
Over the few decades that earthquake simulators have been built, considerable
development effort has progressed to improve table performance3. From a
servo-control viewpoint, earthquake shake tables are distinctly different from
other applications in more than one way. To start with, the focus in servo-
control is on displacement, while the focus of earthquake simulation is on
acceleration history. Although acceleration is theoretically related to
displacement, immense noise as well as error is introduced by the very nature
of the latter being the second derivative of the former. By implication, it is
theoretically impossible to get the same quality of acceleration control as seen
in displacement response. Thus, the acceleration trace under simple sinusoidal
servo-controlled displacement will barely resemble a sine wave. The poor
quality of the acceleration waveform is in fact accentuated at lower
frequencies where servo-control is more precise and in fact far improved at
higher frequency, where the reverse is true of control quality. This paradox
may be explained by the very nature of table response, whereby, as frequency
increases, the table begins to act as a damper, thereby smoothening out its own
acceleration response.
The other distinct feature of shake tables is that they involve the combined
response of several rigidly connected actuators. Thus, while each of the eight
actuators may be independently controlled, they are capable of distorting each
other’s response.
The first problem has been addressed in the literature by adding velocity and
acceleration components to the PID loop2. Further improvements have been
claimed by the introduction of the so-called MCS algorithm, with specific
application to shake tables5,7. In fact, it has been shown that implementation of
the MCS algorithm considerably improves table performance in two ways. It
improves waveform fidelity by reproducing the required displacement time
history more faithfully. Further, it has been shown that the phase lag between
required and achieved waveform is reduced to about 70-80 ms. However, it is
not clear how the MCS algorithm addresses cross-talk between actuators
which is the natural consequence of making the system structurally
constrained.
Our development process was driven by the identification of the significance
of structural constraint. Existing PID scheme appeared to work excellently
with the actuators disconnected from the table. In fact, we were able to
achieve a phase lag as low as 50 ms across all eight channels, which compares
favourably with the best reported in the literature. However, the moment all
eight actuators were connected to the table, the system would go into a
deafening resonance, sometimes, even under static conditions. This was
somewhat relieved by reduced overall gains whereby phase lag doubled, but
table remained steady. However, at the onset of any table movement, an
audible trembling would occur as mentioned in a previously. This would be
subdued by further reduction in gains, leading to more increase in phase lag.
PDF created with pdfFactory Pro trial version www.pdffactory.com
15
The above response was highly reproducible suggesting the need to minimize
actuator cross-talk through reduction or elimination of the effect of structural
constraint. The objective was to come up with a superior servo-loop update
procedure that would give more number of gain settings to play with so that
static as well as dynamic and both high as well as low frequency response
could be handled in order to improve the precision of dynamic servo-control.
In an attempt to improve servo response, we replaced the PID scheme with the
pseudo-derivative feedback (PDF) scheme proposed by Phelan8. This scheme
includes just two components that are simple to implement: integral gain as in
PID and pseudo-derivative feedback, which is derivative of the feedback itself
(rather than of error as in PID). Previous work had demonstrated the efficacy
of this scheme in servo-hydraulics9 . To improve dynamic response under low
amplitude, high frequency, a velocity-sensitive component was added. Finally,
the system servo-equation was rendered non-linear by introducing a
component that increases system response at higher error, while avoiding the
noise-jitter associated with high gain at low frequency or under static
conditions.
The nature of the different components is that their gains can be adjusted in
the sequence in which they have been listed above. This renders a certain
process to system tuning and makes it more intuitive. It may be noted that
tuning an 8-actuator shake table essentially demands the simultaneous
adjustment of settings across all actuators. Table response appeared to
improve dramatically after these changes were introduced. Under static
conditions, position error readouts on individual actuators are typically under
0.1 mm. It will be seen from actual table movement waveforms that under
dynamic conditions simulating actual earthquakes, table position error seldom
exceeds 0.5 mm, while phase lag remains as low as 30 ms, which appears
lower than those reported in the literature.
It may be noted that the corrections mentioned above are performed at the
point of system assembly or re-assembly after repair. No further tuning
appears necessary in actual earthquake simulation testing with or without
payload. This seems to be an improvement over many existing tables2. All the
test results presented below were obtained without any readjustment of system
settings including servo-gain constants.
Sequence of Table Operation
At start-up, the application program on the PC loads the real-time embedded
code into the controller’s DSP memory. Given the channel calibrations and
offsets and also the servo-gain settings across all channels, the DSP sets up the
data acquisition and digital servo-update process. Set points are automatically
equated to current feedback readouts at start-up to avoid any internal loading
of the table.
With pump pressure set to low, the table is raised from its physical resting
position to its geometric center position in the movement envelope, the 0:0:0
position. A cursory check is made of position errors on all eight actuators to
confirm that these are negligible as an indication of reconciled spatial
coordinates and absence of drift or other errors in position readouts. The pump
is now set to high pressure. It takes almost a minute for the accumulators to
charge before pressure settles at the required level.
PDF created with pdfFactory Pro trial version www.pdffactory.com
16
Upon attainment of operating system pressure, position errors are confirmed to
be within acceptable limits as a sign of near-zero internal forces. The system is
now ready to commence the test.
The test settings panel allows the operator to independently select designated
motion for each of the three axes. This will be enhanced to six 6 degrees of
freedom with the addition of rotational motion. The designated motion can
either be harmonic at preset amplitude, frequency and phase, or, pseudo
random, according to a predefined displacement history on file. A loop
counter is provided so that the designated displacement history can be
repeated over the desired number of times.
The next step is to mount the test specimen onto the table and move the table
to the start position. This will ensure the absence of any undesirable jerk at the
commencement of testing. For the same reason, if loop-around is required to
repeat a sequence, the application software ensures that start and end point
table positions coincide.
To move the table in real-time, the PC-based application program
communicates packets of data to the controller that describe incremental table
position at fixed time increment, typically, 2 ms or better. Thus, a set of eight
data points will define the next required rod position readout on the eight
actuators. This train of data flows asynchronously into a circular buffer on the
DSP. The DSP is responsible for moving to the next point in the buffer at the
strictly scheduled clock frequency. Acquired data on actuator positions and
accelerometer readouts flows to the PC in the same manner. It is queued by
the DSP into an n-channel circular buffer that is periodically milked by the
PC. Two-way data movement is through the USB and is implemented at both
ends using Direct Memory Access (DMA) hardware protocols. DMA data
transfers proceed without intervention by or interruption of routine DSP and
PC-CPU operation thereby ensuring that data flow does not interfere with
system performance. This is a vital requirement for real-time control and data
acquisition.
Data collected by the PC in the course of the test can be exported in MS-
Office compatible format for post processing by standard applications. Some
of these results appear in the next section.
In the unlikely event of an emergency such as power-failure or hydraulic trip,
the electronics and servo-valves on the system continue to be driven by a
battery powered uninterruptible power supply that will ensure an orderly
shutdown including a “soft landing” of the table onto its resting point.
3-Axis Table Response under Constant Amplitude Cycling
Constant amplitude cycling was used to tune servo-response in all three-axis
before proceeding to actual earthquake histories. Good displacement response
was obtained over a wide bandwidth of amplitude and frequency without
having to modify servo-gain settings. Thus, near perfect response in all three
axes was obtained under large amplitude small frequency, that was also by far,
the least sensitive to small changes in servo-settings. It also did not seem to
matter whether all three axis were active, or just one. Also, phase between
oscillations along different axis did not seem to matter. However, when
viewed in terms of acceleration, the signal appears noisy, which does not come
as a surprise given the experience of other workers in the area. These
PDF created with pdfFactory Pro trial version www.pdffactory.com
17
observations relate to oscillations in excess of 30 mm stroke and less than 3
Hz frequency.
As frequency goes up and amplitude comes down, table response becomes
more and more sensitive to the feed-forward and derivative gain components
of the servo settings. This is not altogether unexpected given rate sensitivity to
increase with frequency given a constant time interval for numerical
differentiation. With increasing frequency, the quality of the acceleration
signal improves to take a clean, sinusoidal shape as opposed to the noisy and
spiky waveform at lower frequency.
At frequency below 10 Hz, negligible cross-talk was observed between the
three axis. When the table is oscillated along any one axis, there is hardly any
perceptible oscillation along the other two axis. At higher frequency however,
cross talk emerges, rising up to about 20% at 15 Hz. 15 Hz appears to be a
particularly sensitive frequency, which may be associated with the natural
frequency of lateral vibration of the actuators. One may note that this cross-
talk emanates from two sources. One is flexing of the actuator. The major
component accrues from the lateral oscillation of the LVDT core. This induces
an oscillation in position feedback signal, which in turn causes “unsolicited”
table oscillation as the servo-algorithm responds to “correct” erroneously
perceived servo-error. Nylon guides were introduced to dampen LVDT core
vibrations. These did help diminish, but not eliminate cross-talk.
Lateral oscillation of actuators is inevitable in a 3-axis shake table. In order to
minimize or eliminate their adverse effect on the quality of testing and also on
the durability of the rig itself, several options may be independently pursued.
The problem is bound to become less severe with increasing table payload as
actuators get “fatter” without getting longer, thereby becoming more and more
immune to the effect of lateral oscillation. One may explore possibility of
reducing stroke specification if table payload is low. Finally, use of a
displacement transducer that is immune to the effect of lateral oscillation
would considerably improve table performance.
One may observe in summary that cross-talk in table response can be
eliminated to negligible proportions by increasing actuator lateral stiffness and
by using feedback transducers immune to lateral oscillations. It may be noted
however, that table operation under many actual earthquake spectra is unlikely
to see much cross-talk between axes because of the absence of substantial high
frequency component. This appears to be the case with all three spectra whose
test results appear below.
PDF created with pdfFactory Pro trial version www.pdffactory.com
18
3-Axis Table Response under El Centro and Chi-Chi Earthquake Spectra
Results from tests under three different earthquake spectra are presented
below. These were obtained using a 350 Kg flexible payload. These are “first-
shot” results without any iterative tuning. The El Centro and Kalamata
earthquake spectra were chosen because they had been used in a
comprehensive review of different shake tables2. The Chi-Chi earthquake was
selected because it is also severe and involves considerable movement along
all three axes. In case of the El Centro and Chi-Chi spectra, the payload was
mounted on single story building model frame in order to induce some
payload-table interaction. In case of the Kalamata spectrum, the payload was
hard fastened to the table.
200
Required
X, mm
Achieved
0
-200
0 5 10 15 20 25 30 35 40 45 50
200
Required
Y, mm
Achieved
0
-200
0 5 10 15 20 25 30 35 40 45 50
100
Required
Z, mm
Achieved
0
-100
0 5 10 15 20 25 30 35 40 45 50
Time, s
100 Required
Achieved
X, mm
-100
0 10 20 30 40 50 60 70
100
Required
Achieved
Y, mm
-100
0 10 20 30 40 50 60 70
50 Required
Achieved
Z, mm
-50
0 10 20 30 40 50 60 70
Time, s
Fig. 7 Three-axis table response computed from actuator position. Top: El Centro,
bottom: Chi-Chi. These are “first shot” responses with payload after initial
tuning without payload under harmonic movement.
Fig. 7 shows the required and achieved El Centro and Chi-Chi displacement-
time history along all three axes. Not shown is the Kalamata spectrum whose
response was also of the same quality
PDF created with pdfFactory Pro trial version www.pdffactory.com
19
Table response in terms of displacement-time history appears to compare very
favourably with that obtained under the similar spectra by other workers2. This
applies to all three earthquake spectra. Excellent table response is confirmed
by zoomed in segments of required versus achieved displacement-time history
that appears as Fig. 8. The error at any point does not exceed 0.5 mm, which
would be 0.25% of actuator stroke. This appears to compare favourably with
available data from the literature3. The phase lag between required and
achieved table movement waveform is under 30 ms, which is about half of that
reported by other authors3.
30
Required Required Required
-28
25 Achieved Achieved Achieved
-30 50
20
-32
15 49
-34
X , mm
X , mm
X, mm
10 -36
48
5 -38
-40
0 47
-42
-5
-44 46
2.8 3 3.2 3.4 3.6 3.8 4.05 4.1 4.15 4.2 4.25 4.3 4.35 4.4 4.8 4.9 5 5.1 5.2 5.3
Time, s Time, s Time, s
Required -10 Required 60 Required
112
Achieved Achieved Achieved
111 -12 55
110
-14 50
109
X , mm
X , mm
X , mm
108 -16 45
107 -18 40
106
-20 35
105
104 -22 30
5.5 5.6 5.7 5.8 5.9 6 6.1 6.7 6.8 6.9 7 7.2 7.4 7.6 7.8 8 8.2 8.4 8.6
Time, s Time, s Time, s
-102
Required Required
Required Achieved Achieved
-55 Achieved -103 15
-104
10
-60 X, mm
X, mm
-105
X, mm
-106 5
-65
-107
0
-70 -108
12.6 12.8 13 13.2 13.4 15 15.5 16 16.5 17 17.5
10.8 11 11.2 11.4 11.6 11.8 Time, s
Time, s
Time, s
Fig. 8. Zoomed-in transient segments at turning points on the El Centro X-axis
displacement-time history. Time lag of about 30 ms and displacement error
less than 0.5 appear to suggest table response that compares favourably with
the best reported in the literature.
Figs 9-11 show table response for the three spectra in terms of acceleration
response expressed as acceleration-time history as well as PSD for the three
spectra. Shown in the figures are original data, processed data from BiSS
MEMS accelerometers mounted on the table as well as from data obtained as
second derivative of measured displacement time history.
Table 2 lists the filter settings used in processing acceleration data. Table 3
lists the maximum percentage errors in table response measured for peak
displacement and acceleration data and Table 4 lists the table resonance
frequencies based on analysis of table response.
These data appear to compare favourable with those reported in the literature
for the El Centro and Kalamata spectra. A more complete picture will emerge
as rotational components are implemented on the table and as variations in
spectra and payloads are investigated.
In summary, one may note the excellent displacement – history response
obtained as indicated by Table 3 that shows a maximum 4% error in table
position – considering particularly, that no re-adjustment of system settings
PDF created with pdfFactory Pro trial version www.pdffactory.com
20
was involved. At the same time, while the maximum acceleration error of
120% may be comparable with those reported in the literature, it does
underscore the scope for future improvement. Further, one may note that the
acceleration history response shown in Figures 9-11 involved a subjective
element by way of selected filter settings that are listed in Table 2. A more
objective way of comparing table response would be to use the same
accelerometers, place them at similar locations on tables and impose similar
data acquisition and filtering processes before drawing any conclusions about
table acceleration history response.
F ro m a c c e le r o m e te r F r o m d is p la c e m e n t
O rig in a l D a ta o n th e ta b le tim e h is to ry
0 .4 0 .4
0 .2 0 .2 0 .2
0 0 0
g
-0 .2 -0 .2 - 0 .2
-0 .4 - 0 .4
0 20 40 0 20 40 0 20 40
T im e , s T im e , s T im e , s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-1 0 -1 0 -1 0
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
F re q u e n c y , H z F re q u e n c y , H z F req u e nc y, H z
F ro m a c c e le r o m e te r F r o m d is p la c e m e n t
O rig in a l D a ta o n th e ta b le tim e h is to ry
0 .4 0 .4 0 .4
0 .2 0 .2 0 .2
0 0 0
g
-0 .2 -0 .2 - 0 .2
-0 .4 -0 .4 - 0 .4
0 20 40 0 20 40 0 20 40
T im e , s T im e , s T im e , s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-1 0 -1 0 -1 0
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
F re q u e n c y , H z F req u e nc y, H z F re q u e n c y , H z
F ro m a c c e le ro m e te r F ro m d is p lac e m e n t
O r ig in al D a ta o n th e tab le tim e his to ry
0 .4 0 .4 0 .4
0 .2 0 .2 0 .2
0 0 0
g
-0 .2 -0 .2 - 0 .2
-0 .4 -0 .4 - 0 .4
0 20 40 0 20 40 0 20 40
T im e, s T im e , s T im e, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-1 0 -1 0 -1 0
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
F req u e n cy, H z F re q u e n c y , H z F re q u e n c y , H z
Fig. 9 X (top), Y (middle) and Z (bottom) table response to El-Centro spectrum
PDF created with pdfFactory Pro trial version www.pdffactory.com
From accelerometer From displacement
21
Original Data on the table time history
0.5 0.5 0.5
0 0 0
g
-0.5 -0.5 -0.5
0 10 20 30 0 20 40 0 20 40
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
From accelerometer From displacement
Original Data on the table time history
0.5 0.5 0.5
0 0 0
g
-0.5 -0.5 -0.5
0 10 20 30 0 20 40 0 20 40
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
From accelerometer From displacement
Original Data on the table time history
0.5 0.5 0.5
0 0 0
g
-0.5 -0.5 -0.5
0 10 20 30 0 20 40 0 20 40
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
Fig. 10 X (top), Y (middle) and Z (bottom) table response to Kalamata spectrum
PDF created with pdfFactory Pro trial version www.pdffactory.com
22
From accelerometer From displacement
Original Data on the table time history
0.2 0.2 0.2
0.1 0.1 0.1
0 0 0
g
-0.1 -0.1 -0.1
-0.2 -0.2 -0.2
0 20 40 60 0 20 40 60 0 20 40 60
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2 -5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
From accelerometer From displacement
Original Data on the table time history
0.2 0.2 0.2
0.1 0.1 0.1
0 0 0
g
-0.1 -0.1 -0.1
-0.2 -0.2 -0.2
0 20 40 60 0 20 40 60 0 20 40 60
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
From accelerometer From displacement
Original Data on the table time history
0.15 0.15 0.15
0.1 0.1 0.1
0.05 0.05 0.05
0 0 0
g
-0.05 -0.05 -0.05
-0.1 -0.1 -0.1
0 20 40 60 0 20 40 60 0 20 40 60
Time, s Time, s Time, s
0 0 0
10 10 10
PSD, g /f
2
-5 -5 -5
10 10 10
-10 -10 -10
10 0 2
10 0 2
10 0 2
10 10 10 10 10 10
Frequency, Hz Frequency, Hz Frequency, Hz
Fig. 11 X (top), Y (middle) and Z (bottom) table response to Chi-Chi spectrum
PDF created with pdfFactory Pro trial version www.pdffactory.com
23
Test Filter Filter characteristics
N R LP HP
X Chebyshev Type II digital filter 4 40 0.2 15
El Centro Y Chebyshev Type II digital filter 4 40 0.2 15
Z Chebyshev Type II digital filter 4 40 0.2 15
X Chebyshev Type II digital filter 3 60 0.1 30
Chi-Chi Y Chebyshev Type II digital filter 3 60 0.14 40
Z Chebyshev Type II digital filter 3 60 0.14 40
X Chebyshev Type II digital filter 4 50 0.25 50
Kalamata Y Chebyshev Type II digital filter 4 50 0.25 50
Z Chebyshev Type II digital filter 4 50 0.25 50
Table 2. Filter Characteristics used in processing acquired data
Maximum time history error (%)
Test X Y Z
Acc. Disp. Acc. Disp. Acc. Disp.
El Centro 33.0579 0.0344 36.6842 0.8281 30.7190 0.5494
Chi-Chi 2.2356 0.1200 12.0278 0.3961 128.2419 0.2922
Kalamata 31.4215 0.1812 91.3470 3.9275 11.1933 0.9021
Table 3. Maximum response error for peak value of displacement and acceleration
Axis Frequency, Hz
X 21.85
Y 22.75
Z 24.76
Table 4. Resonance frequencies of the table at flexible payload of 350 kg
PDF created with pdfFactory Pro trial version www.pdffactory.com
24
DISCUSSION
The shake table controls are based on a low-end digital signal processor that is
widely used in consumer electronics and therefore is inexpensive, readily
available, not subject to any dual-use embargoes and likely to be in production
for at least the next ten years. Other unique features of the technology are the
use of single-ended, double-acting actuators, contamination-insensitive,
industrial servo-hydraulics and energy-efficient hydraulic drive. All these
together add up to a technology that makes 3-axis, 6-DOF seismic testing
much more accessible and affordable than was hitherto possible. Future work
will be focused on eliminating frequency limitations on table performance that
have been attributed to the slender actuators associated with low payload
capacity. Work is in progress to implement 3-axis rotational component and
more data acquisition options for instrumented earthquake and 3-axis vibration
testing. These would convert the technology into a total solution that may be
offered as a turnkey product on the global market. The importance of
earthquake engineering as accentuated by recent seismic events ensures the
demand for this high technology, high value product.
It may be noted that the building blocks of both hardware and software used
on the IISc shake table are the same as in other single as well as n-channel test
control applications from BiSS Research. Apart from reducing the set up cost
of the system, this “open architecture” design approach also implies reduced
cost and superior support for other n-channel applications including Stewart
tables and multi-poster test rigs for automobiles, railway coaches, etc.
One possibility for a future project is the development of a new type of rig to
simulate the development of wave patterns that eventually result in tsunamis.
This would involve controlled motion of plates that form the bottom of a large
water reservoir.
While looking at the future, one may note the scope for considerable
engineering improvement. This includes provision to protect the system from
falling debris, installation of photographic aids and their interface with the
control system and development of new applications such as frequency sweep
tests to characterize resonance frequency of test specimens. There are no
apparent obstacles in scaling up the new technology to higher table payloads.
Going by the actual expenditures incurred towards the IISc project, tables with
payload of 5,000 to 50,000 Kgs can be profitably constructed at a fraction of
prevailing cost. This would imply considerable direct benefits to the taxpayer
and the potential for much wider public access to the technology of 3-axis
earthquake simulation. The practical use of shake table technology will be
determined by the ability to handle full-scale structures. This implies greater
payload capacity as indicated by the Japanese effort at building a 1,200-ton
facility1. In this regard, the technology described in this paper appears to bear
the potential of an affordable tool to academics, earthquake-engineering
specialists, practicing civil engineers, regulatory authorities and industry in
their joint effort to advance earthquake-resistant structures.
PDF created with pdfFactory Pro trial version www.pdffactory.com
25
CONCLUSIONS
• A 3-axis, 6DOF, 500 Kg payload earthquake shake table was
developed using eight 15-kN, 300-500 mm stroke single-ended,
double-acting actuators.
• Table movement is digitally controlled by a DSP-based controller
performing up to 6,000 servo-loop updates a second on all eight
channels. Servo gain settings remained unchanged for various payloads
and earthquake spectra that were tested.
• Some of the features of the table including the use of single-ended
actuators, direct-drive contamination insensitive valves and variable
frequency servo-controlled pump make the technology more reliable
and less expensive than conventional options.
• Tests on the table using El Centro, Kalamata and Chi-Chi earthquake
records indicate table response and accuracy that compares favourably
with those reported elsewhere. 3-axis table movement error was under
4% and phase lag between required and achieved position was of the
order of 30 ms.
• Measured acceleration and PSD data appear to compare well with
required signatures. However, there is scope for further improvement
of acceleration response.
• Several engineering aspects of the shake table hold the promise of
improvement. These include system protection from damage due to
debris, greater variety of applications including frequency sweep,
resonant mode identification, etc.
• Stiff shake tables of physically constrained configuration demand high
precision in actuator movement as well as in computed spatial
coordinates. This appears to be an inevitable problem specific to real-
time control of 8-actuator earthquake shake tables.
• Digital servo-control technology for 3-axis shake tables opens the
possibility of constructing tables of much larger capacity. This
combined with country-specific technologies such as contamination-
insensitive servo-hydraulics and unprecedented energy efficiency carry
the promise of commercially viable seismic testing.
Acknowledgement. The authors are grateful to Dept. of Civil Engineering,
Indian Institute of Science for the opening that made this development
possible and to Prof. R. N. Iyengar for his constant encouragement. The
servo-actuator assemblies were designed, built and installed at site by Vijay,
Yogesh, Ramakrishna, Diwakar, Rajesh and Sadat. The custom low noise
signal conditioners for LVDTs were designed by Nagarathna and fine-tuned at
site by Rincy and Girish. The on-site cabling and instrumentation was
performed by Ravi, Girish, Shiva Kumar and the on-site hydraulics assembly
was performed by Jayanna and Cheluvaraj. The civil work for this facility was
carried out by Giriraju.
PDF created with pdfFactory Pro trial version www.pdffactory.com
26
REFERENCES
[1] Ogawa, N., Ohtani, K, Katayama, T, Shibata, H., Construction of a 3-
dimensional large-scale shaking table and development of core
technology, Phil. Trans. R. Soc. Lond. A (2001) 359, 1725-1751
[2] A. J. Crewe, R. T. Severn, The European collaborative programme on
evaluating the performance of shaking tables, Phil. Trans. R. Soc.
Lond. A (2001) 359, 1671-1696
[3] Stewart, D., A platform with six degrees of freedom, Proc. Inst. Mech.
Engrs., 180, 1965, 371-386.
[4] Lung-Wen Tsai, Robot Analysis, The mechanics of serial and parallel
manipulators, 1999, John Wiley & Sons, Inc
[5] Gomez, E. Application of the MCS algorithm to the control system of
the Bristol shaking table, PhD thesis, University of Bristol.
[6] Gomez, E. G. & Stoten, D.P. 2000 A Comparative study of the
adaptive MCS control algorithm on European shaking tables, In Proc.
12th World conf. On Earthquake engineering, Auckland, New Zealand,
January 2000, paper 2626
[7] David P. Stoten, Eduardo G. Gomez, Adaptive control of shaking
tables using the minimum control synthesis algorithm, Phil. Trans. R.
Soc. Lond. A (2001) 359, 1697-1723
[8] Sunder, R., and Venkatesh, C.S., Microprocessor-based controller for
actuators in structural testing, Automation in Fatigue and Fracture
Testing and Analysis, ASTM STP1231, C. Amzallag, Ed., American
Society for Testing and Materials, Philadelphia, 1994, pp. 70-83
[9] Phelan, R. M., Automatic Control Systems, Cornell University Press,
Ithaca, N.Y., 1977.
PDF created with pdfFactory Pro trial version www.pdffactory.com
You might also like
- Incremental Encoder BDG Series 6360/6310Document22 pagesIncremental Encoder BDG Series 6360/6310Faulhaber Adrian0% (1)
- Arihant Class 12 Term 2 Physics 2022 @cbsebookshubDocument179 pagesArihant Class 12 Term 2 Physics 2022 @cbsebookshubgxsdgsdfg100% (4)
- CompactaciónDocument159 pagesCompactaciónDaniel Tapia100% (5)
- Mil-Std-1235b 1981Document62 pagesMil-Std-1235b 1981karismaNo ratings yet
- NMC Vacuum Airflow ProceduresDocument17 pagesNMC Vacuum Airflow ProceduresRafael Dupont67% (3)
- Development of A Digitally-Controlled Three-Axis Earthquake Shake TableDocument14 pagesDevelopment of A Digitally-Controlled Three-Axis Earthquake Shake TableDebendra Dev KhanalNo ratings yet
- Experimental Analysis of Earthquake Shake TableDocument4 pagesExperimental Analysis of Earthquake Shake TableAJER JOURNALNo ratings yet
- Experimental Analysis of Earthquake Shake TableDocument4 pagesExperimental Analysis of Earthquake Shake TableAJER JOURNALNo ratings yet
- An Ergonomic Evaluation of Excavating OperationsDocument4 pagesAn Ergonomic Evaluation of Excavating OperationsAnand sharmaNo ratings yet
- High-Fidelity Control of Seismic Shaking TableDocument20 pagesHigh-Fidelity Control of Seismic Shaking TableJose Luis SarmientoNo ratings yet
- Cyclic TriaxialDocument2 pagesCyclic TriaxialnkotiaNo ratings yet
- 65 19 ResponseDocument4 pages65 19 ResponseaekockautNo ratings yet
- 1 s2.0 S0266352X20302202 MainDocument9 pages1 s2.0 S0266352X20302202 Mainnhan nguyenNo ratings yet
- Experimental Setup For Seismic EvaluationDocument33 pagesExperimental Setup For Seismic EvaluationnejmudinzNo ratings yet
- Shaking Table Test Study On Seismic Performance of Concrete Arch Bridge With Steel WebDocument9 pagesShaking Table Test Study On Seismic Performance of Concrete Arch Bridge With Steel WebangelomarinilliNo ratings yet
- 63409Document7 pages63409Joshua BonasuhulNo ratings yet
- Jalbi - Bhattacharya - 2018 - Closed Form Solution For The First Natural Frequency of OWT Jackets On Mult Foundation SSIDocument21 pagesJalbi - Bhattacharya - 2018 - Closed Form Solution For The First Natural Frequency of OWT Jackets On Mult Foundation SSIIWINOSA AGHEDONo ratings yet
- Dynamic Characteristics of A Base Isolated Building From Ambient Vibration Measurements and Low Level Earthquake ShakingDocument10 pagesDynamic Characteristics of A Base Isolated Building From Ambient Vibration Measurements and Low Level Earthquake ShakingMarilene LobatoNo ratings yet
- Structural Seismic Design Optimization and Earthquake Engineering: Formulations and ApplicationsDocument27 pagesStructural Seismic Design Optimization and Earthquake Engineering: Formulations and ApplicationsAjayvidyanand SharmaNo ratings yet
- Earthquake Analysis of G+10 Building Using Response Spectrum Method and Time History Method - A ComparisonDocument3 pagesEarthquake Analysis of G+10 Building Using Response Spectrum Method and Time History Method - A ComparisonRahul KumarNo ratings yet
- Earthquake Analysis of G+10 Building Using Response Spectrum Method and Time History Method - A ComparisonDocument3 pagesEarthquake Analysis of G+10 Building Using Response Spectrum Method and Time History Method - A ComparisonGemechuNo ratings yet
- Experimental Study of An Adaptive Base Isolation System For BuildingsDocument8 pagesExperimental Study of An Adaptive Base Isolation System For BuildingslouhibiNo ratings yet
- Seismic InversionDocument9 pagesSeismic InversionMuhammad ArslanNo ratings yet
- Machineries Selection03Document8 pagesMachineries Selection03miningnova2No ratings yet
- Damage Detection Using Vibration MeasurementsDocument8 pagesDamage Detection Using Vibration Measurementsaqraa1999No ratings yet
- 1 s2.0 S095042301400182X MainDocument13 pages1 s2.0 S095042301400182X Mainalassane wadeNo ratings yet
- Validation by Centrifuge Testing of Numerical Simulations For Soil-Foundation-Structure SystemsDocument15 pagesValidation by Centrifuge Testing of Numerical Simulations For Soil-Foundation-Structure Systemsrtwueee fcbcNo ratings yet
- Experiment 9Document10 pagesExperiment 9Kushal DesardaNo ratings yet
- A Parametric Study of X and V Bracing Industrial Steel StructureDocument5 pagesA Parametric Study of X and V Bracing Industrial Steel StructureAce NovoNo ratings yet
- A Suite of Exercises For Verifying Dynamic Earthquake Rupture CodesDocument17 pagesA Suite of Exercises For Verifying Dynamic Earthquake Rupture CodesSumitNo ratings yet
- Semi-Active Control of The Benchmark Highway Bridge Based On Seismic Early Warning SystemsDocument13 pagesSemi-Active Control of The Benchmark Highway Bridge Based On Seismic Early Warning SystemsIrawan TaniNo ratings yet
- The Crosshole Sonic Logging CSL Measurement SystemDocument8 pagesThe Crosshole Sonic Logging CSL Measurement SystemlimaNo ratings yet
- Response of A Substandard Two-Column Bridge Bent Subjected To Near-Fault Ground MotionDocument16 pagesResponse of A Substandard Two-Column Bridge Bent Subjected To Near-Fault Ground MotionNeeraj ChaddhaNo ratings yet
- 07 TT 05 Seismic ABB PDFDocument3 pages07 TT 05 Seismic ABB PDFAhsanNo ratings yet
- Robotic Wheelchair Control Considering User ComforDocument9 pagesRobotic Wheelchair Control Considering User ComforKaterineNo ratings yet
- Fatigue Analysis of Steel Jacket Platform in Shallow Water Depth in The Gulf of GuineaDocument12 pagesFatigue Analysis of Steel Jacket Platform in Shallow Water Depth in The Gulf of GuineaAlireza Asgari MotlaghNo ratings yet
- Acceleration Environment: A Researcher's Guide ToDocument50 pagesAcceleration Environment: A Researcher's Guide Tobriyid catalina cruz ostosNo ratings yet
- Some Applications of Virtual Instrumentation in NDTDocument8 pagesSome Applications of Virtual Instrumentation in NDTJenish BaldhaNo ratings yet
- 9781845647506008FU1Document12 pages9781845647506008FU1ashap1905_90005917No ratings yet
- University of California, Los Angeles: Proposal Writing GuideDocument6 pagesUniversity of California, Los Angeles: Proposal Writing Guiderajeshwar suddalaNo ratings yet
- Monolithic Multi Degree of Freedom (Mdof) Capacitive Mems AccelerometersDocument20 pagesMonolithic Multi Degree of Freedom (Mdof) Capacitive Mems AccelerometersjitendraNo ratings yet
- Investigation of Failure Patterns in Sand Due To Laterally Loaded Pile Using X-Ray CTDocument7 pagesInvestigation of Failure Patterns in Sand Due To Laterally Loaded Pile Using X-Ray CTSwaraj SahaNo ratings yet
- Gps in Dynamic Monitoring of Long-Period Structures: M. CëelebiDocument7 pagesGps in Dynamic Monitoring of Long-Period Structures: M. CëelebiSarmad BarwaryNo ratings yet
- Long Span Bridge Health Monitoring System in Japan PDFDocument8 pagesLong Span Bridge Health Monitoring System in Japan PDFblukututNo ratings yet
- Experimental Analysis of A Shake Table Test of Timber-Framed Structures With Stone and Earth InfillDocument13 pagesExperimental Analysis of A Shake Table Test of Timber-Framed Structures With Stone and Earth Infillflo_24_11No ratings yet
- 18 Selection - and - Scaling - of - Ground - Motion - RDocument8 pages18 Selection - and - Scaling - of - Ground - Motion - Rprraaddeej chatelNo ratings yet
- 14 - 12 03 0104 PDFDocument8 pages14 - 12 03 0104 PDFKashif AlamNo ratings yet
- Vibration Analysis of A 3-Bladed Marine Propeller Shaft For 35000DWT Bulk CarrierDocument9 pagesVibration Analysis of A 3-Bladed Marine Propeller Shaft For 35000DWT Bulk CarrierAfiq IkhwanNo ratings yet
- Structural and Fatigue Analysis of Equipment For Cutting Weeds Between Plants On The Same RowDocument12 pagesStructural and Fatigue Analysis of Equipment For Cutting Weeds Between Plants On The Same RowGabriel GheorgheNo ratings yet
- Generic Criteria For Vibration-Sensitive EquipmentDocument17 pagesGeneric Criteria For Vibration-Sensitive EquipmentnoijpNo ratings yet
- Structural Health Monitoring For A Wind TurbineDocument21 pagesStructural Health Monitoring For A Wind TurbineMArceloNo ratings yet
- ReyesChristain-Denver-P ME3171 TechnicalReportFormat ComAppDocument8 pagesReyesChristain-Denver-P ME3171 TechnicalReportFormat ComAppNATHANIEL YACASNo ratings yet
- 36 Exploration of Uni-Axial Shake Table DynamicsDocument17 pages36 Exploration of Uni-Axial Shake Table DynamicsAirouche_MeNo ratings yet
- 1 s2.0 S0022460X23001177 MainDocument19 pages1 s2.0 S0022460X23001177 MainmohamedNo ratings yet
- Vertical Vibrations of Block FoundationsDocument5 pagesVertical Vibrations of Block FoundationsSrinivasan VenkatramanNo ratings yet
- Java-Powered Virtual Laboratories For Earthquake Engineering EducationDocument17 pagesJava-Powered Virtual Laboratories For Earthquake Engineering EducationDumitrita VatamanNo ratings yet
- Structural Health Monitoring of Offshore Jacket Structure SHM AnalysisDocument4 pagesStructural Health Monitoring of Offshore Jacket Structure SHM AnalysisArturoNo ratings yet
- Research ArticleDocument6 pagesResearch ArticleSangeet SharmaNo ratings yet
- Implementing Machine Learning in Earthquake EngineeringDocument5 pagesImplementing Machine Learning in Earthquake EngineeringEmby BinoeNo ratings yet
- Drift 2Document12 pagesDrift 2Igba Tobit UvieogheneNo ratings yet
- Energy Absorption of Safety Nets in Building ConstructionDocument9 pagesEnergy Absorption of Safety Nets in Building ConstructionJorge ChavezNo ratings yet
- Numerical Analysis and Validation of Irregularity in Moment Frame Structure Due To Varying Location of Tuned Mass DamperDocument9 pagesNumerical Analysis and Validation of Irregularity in Moment Frame Structure Due To Varying Location of Tuned Mass DamperIJRASETPublicationsNo ratings yet
- Geometrical OptimizationDocument7 pagesGeometrical OptimizationVijay KambleNo ratings yet
- Hübler 2018 J. Phys. Conf. Ser. 1037 032035Document12 pagesHübler 2018 J. Phys. Conf. Ser. 1037 032035rathanNo ratings yet
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)From EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)No ratings yet
- 3Document3 pages3Huzaifa U FarooqNo ratings yet
- Lintel DrawingsDocument1 pageLintel DrawingsHuzaifa U FarooqNo ratings yet
- Flexural Behavior of Reinforced Concrete Beams by Using Rice Husk Ash As Partial Replacement of Fine Aggregates in Cement ConcreteDocument6 pagesFlexural Behavior of Reinforced Concrete Beams by Using Rice Husk Ash As Partial Replacement of Fine Aggregates in Cement ConcreteHuzaifa U FarooqNo ratings yet
- OSL Account Opening RequirementsDocument6 pagesOSL Account Opening RequirementsHuzaifa U FarooqNo ratings yet
- C191 Setting TimeDocument8 pagesC191 Setting TimeHuzaifa U FarooqNo ratings yet
- Compressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50 MM) Cube Specimens)Document12 pagesCompressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50 MM) Cube Specimens)Huzaifa U Farooq100% (1)
- 0.077634 ft3/d 0.094082 ft3/d 0.28893 ft3/d: ProjectDocument1 page0.077634 ft3/d 0.094082 ft3/d 0.28893 ft3/d: ProjectHuzaifa U FarooqNo ratings yet
- MTCXO1004 Ver1Document2 pagesMTCXO1004 Ver1dcastrelos2000No ratings yet
- Waves Revision Notes (IGCSE PHYSICS)Document12 pagesWaves Revision Notes (IGCSE PHYSICS)Khushi MehtaNo ratings yet
- Steam ReliefDocument8 pagesSteam ReliefhgscanavinoNo ratings yet
- The Science of Meditation: A Quantum Crystallography PerspectiveDocument11 pagesThe Science of Meditation: A Quantum Crystallography PerspectiveposmarichardNo ratings yet
- Muhammad Umer Shehzad - Jawad FakhirDocument74 pagesMuhammad Umer Shehzad - Jawad FakhirMarissa WhiteNo ratings yet
- Lab 1: Periodic Signals and The Fourier SeriesDocument5 pagesLab 1: Periodic Signals and The Fourier SeriessibascribdNo ratings yet
- Budget of Work in Science: Quarter: 3rd Grade Level: Grade 7 School: M.B. Asistio Sr. High School - MainDocument2 pagesBudget of Work in Science: Quarter: 3rd Grade Level: Grade 7 School: M.B. Asistio Sr. High School - MainRowena Sta MariaNo ratings yet
- Wave MechanicsDocument77 pagesWave MechanicsAlbasher SahibuddinNo ratings yet
- User Manual: PAC-T100 (Transformer Protection and Control Unit)Document90 pagesUser Manual: PAC-T100 (Transformer Protection and Control Unit)syed Mujtaba hassan100% (1)
- The Statistical Distribution of The Maxima of A Random Function by Cartwright and Longuet HigginsDocument22 pagesThe Statistical Distribution of The Maxima of A Random Function by Cartwright and Longuet Higginsadaniliu13No ratings yet
- SVP BooksDocument88 pagesSVP BooksmooseekaNo ratings yet
- Vibration Analysis of Gear Box.5-MilosprokoDocument3 pagesVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- QuestionDocument48 pagesQuestionatharali752155No ratings yet
- Waves and Sound P2Document40 pagesWaves and Sound P2Muhammad FaisalNo ratings yet
- Easy, Frequency-Selective Measurement of EMF EmissionsDocument12 pagesEasy, Frequency-Selective Measurement of EMF EmissionsRajesh MishraNo ratings yet
- DP Physics - Practical - Speed of Sound (Drinking Straw)Document3 pagesDP Physics - Practical - Speed of Sound (Drinking Straw)asbjunk6No ratings yet
- DNV Os H101Document55 pagesDNV Os H101Noralia Amanina Osman100% (2)
- Science Measures The Human Energy FieldDocument7 pagesScience Measures The Human Energy FieldNICOL JOHANA ANGULO ORTIZNo ratings yet
- Digilent - Hands-On Discovery For Analog Electronics EducationDocument45 pagesDigilent - Hands-On Discovery For Analog Electronics EducationOnofre Daniel100% (1)
- Agilent E4980A Precision LCR Meter - 5989-4435EN PDFDocument37 pagesAgilent E4980A Precision LCR Meter - 5989-4435EN PDFprovolissima0% (1)
- An Ultrasonic Sensor For Human Presence Detection PDFDocument6 pagesAn Ultrasonic Sensor For Human Presence Detection PDFenoc konanNo ratings yet
- AMI UNIT III Presentation 4 03.09.2020Document23 pagesAMI UNIT III Presentation 4 03.09.2020Jayashree SathiyanarayananNo ratings yet
- Bravo 1-17Document487 pagesBravo 1-17lone survivorNo ratings yet
- IFR32135-15Ah-UN38 - Test ReportDocument13 pagesIFR32135-15Ah-UN38 - Test ReportAlexandre RibeiroNo ratings yet
- Edited Action ResearchDocument32 pagesEdited Action ResearchEdz SoretsellaBNo ratings yet