Download as pdf or txt
You might also like
- Assignment Unit 3 - With AnswerDocument6 pagesAssignment Unit 3 - With AnswereuanaresNo ratings yet
- Microbiologics Information Manual-9020-7751 PDFDocument190 pagesMicrobiologics Information Manual-9020-7751 PDFbogdan.tomosNo ratings yet
- System Hardware SOEN228Document5 pagesSystem Hardware SOEN228Hichem SehabiNo ratings yet
- Lab 2Document4 pagesLab 2geoaamer100% (1)
- Familiarization To MATLABDocument8 pagesFamiliarization To MATLABJonMarcoReyesNo ratings yet
- Lab 1Document6 pagesLab 1Sai SaurabNo ratings yet
- Interview Questions for IBM Mainframe DevelopersFrom EverandInterview Questions for IBM Mainframe DevelopersRating: 1 out of 5 stars1/5 (1)
- LAB 9 - The Performance of MIPS: GoalsDocument5 pagesLAB 9 - The Performance of MIPS: GoalsChris NutsukpuiNo ratings yet
- Cpre 381 Project Report 1Document22 pagesCpre 381 Project Report 1api-269044562No ratings yet
- LAB 7 - Writing Assembly Code: Programming". If You Have Difficulties, Go Again Through The SlidesDocument11 pagesLAB 7 - Writing Assembly Code: Programming". If You Have Difficulties, Go Again Through The SlidesNANA NANANo ratings yet
- Milp Base PaperDocument4 pagesMilp Base PapervenkateshjuturuNo ratings yet
- Lab Project: Shift-and-Add Multiplication Circuit With StorageDocument5 pagesLab Project: Shift-and-Add Multiplication Circuit With StoragesneophNo ratings yet
- Lab4 CombMultDocument12 pagesLab4 CombMultMayank AgarwalNo ratings yet
- Lecture 17: Designing A Central Processor Unit 1: The ArchitectureDocument6 pagesLecture 17: Designing A Central Processor Unit 1: The ArchitectureTaqi Shah100% (1)
- Booth'S Multiplier & 32 BIT ALU For Arm7 Microprocessor: Ece345 Initial Project ProposalDocument4 pagesBooth'S Multiplier & 32 BIT ALU For Arm7 Microprocessor: Ece345 Initial Project ProposalRushikesh DeshmukhNo ratings yet
- A Level CS CH 6 9618Document9 pagesA Level CS CH 6 9618calvin esauNo ratings yet
- A New Vlsi Architecture of Parallel Multiplier Based On Radix-4 Modified Booth Algorithm Using VHDLDocument8 pagesA New Vlsi Architecture of Parallel Multiplier Based On Radix-4 Modified Booth Algorithm Using VHDLanshuj11No ratings yet
- Answer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputDocument12 pagesAnswer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputAmit JainNo ratings yet
- The MagPi Issue 6Document32 pagesThe MagPi Issue 6chiquitito100% (1)
- Sheet 03Document3 pagesSheet 03eir.gnNo ratings yet
- Project1 Hardware Design With Verilog: Submission ModalitiesDocument5 pagesProject1 Hardware Design With Verilog: Submission ModalitiesZulqarnain KhanNo ratings yet
- Lecture 17: Designing A Central Processor Unit 1: The ArchitectureDocument6 pagesLecture 17: Designing A Central Processor Unit 1: The ArchitecturerinobiNo ratings yet
- Reporte 1Document8 pagesReporte 1diego.campos7896No ratings yet
- Computer Organization and Architecture Lab 2014Document131 pagesComputer Organization and Architecture Lab 2014Zain Ul AbideenNo ratings yet
- Lab 1Document4 pagesLab 1Muhammad UmarNo ratings yet
- Lab 2: Modifying Legup To Limit The Number of Hardware Functional UnitsDocument8 pagesLab 2: Modifying Legup To Limit The Number of Hardware Functional UnitsSuresh KumarNo ratings yet
- Algorithm and DesignDocument6 pagesAlgorithm and DesignhaigshaiNo ratings yet
- MIT6 189IAP11 hw2Document8 pagesMIT6 189IAP11 hw2Ali AkhavanNo ratings yet
- How To Fit Sigmoid Functions in Openoffice Calc and ExcelDocument3 pagesHow To Fit Sigmoid Functions in Openoffice Calc and ExcelDaryl harperNo ratings yet
- Project - Behavioral Model: Homework 2 - April 24, 2005Document2 pagesProject - Behavioral Model: Homework 2 - April 24, 2005Shawn SagarNo ratings yet
- Coa Lab FileDocument19 pagesCoa Lab FileNARENDERNo ratings yet
- IB 115 Lab #1: An Introduction To Matlab: You Must Hand in Question 17 and 19 For GradingDocument9 pagesIB 115 Lab #1: An Introduction To Matlab: You Must Hand in Question 17 and 19 For GradingStacyLiNo ratings yet
- NEW333Document9 pagesNEW333Amish SuchakNo ratings yet
- Note 2Document30 pagesNote 2panujyneNo ratings yet
- BaiTap Chuong123Document19 pagesBaiTap Chuong123Nguyễn Ngọc TúNo ratings yet
- Lab 2: Brief Tutorial On Openmp Programming Model: Adrián Álvarez, Sergi Gil Par4207 2019/2020Document11 pagesLab 2: Brief Tutorial On Openmp Programming Model: Adrián Álvarez, Sergi Gil Par4207 2019/2020Adrián AlvarezNo ratings yet
- Computer & ITDocument148 pagesComputer & ITMohit GuptaNo ratings yet
- Ece4750 Lab1 ImulDocument7 pagesEce4750 Lab1 ImulThuy NguyenNo ratings yet
- Synopsys Booth MultiplierDocument6 pagesSynopsys Booth Multiplierbipin123456789No ratings yet
- Analysis and Design of AlgorithmsDocument75 pagesAnalysis and Design of AlgorithmsSiva RajeshNo ratings yet
- Module 2 NotesDocument28 pagesModule 2 NotesKrithika KNo ratings yet
- Lab 1Document10 pagesLab 1Preeti KatiyarNo ratings yet
- ArchitectureDocument112 pagesArchitectureKrishnaveni DhulipalaNo ratings yet
- Lab1 15Document5 pagesLab1 15Eng:ehab AlmkhlafiNo ratings yet
- Activity No 6 Bit ManipulationDocument6 pagesActivity No 6 Bit ManipulationMark Daniel RuizNo ratings yet
- Study of Combinational and Booth Multiplier: Neha Goyal, Khushboo Gupta, Renu SinglaDocument4 pagesStudy of Combinational and Booth Multiplier: Neha Goyal, Khushboo Gupta, Renu SinglajdNo ratings yet
- Project Report CS 341: Computer Architecture LabDocument12 pagesProject Report CS 341: Computer Architecture LabthumarushikNo ratings yet
- Scilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaDocument8 pagesScilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaWendell Kim LlanetaNo ratings yet
- 05 HWDocument3 pages05 HWSandipChowdhuryNo ratings yet
- Laboratory Exercise 3: Using Logic InstructionsDocument3 pagesLaboratory Exercise 3: Using Logic InstructionsKhôiPhạmNo ratings yet
- Design of A 16-Bit Posit Multiplier With Power Efficiency: Monisha.R, Sivasakthi.VDocument4 pagesDesign of A 16-Bit Posit Multiplier With Power Efficiency: Monisha.R, Sivasakthi.VRatnakarVarunNo ratings yet
- Introduction To ProgrammingDocument28 pagesIntroduction To ProgrammingDiego Antonio Carrasco MolinaNo ratings yet
- Lab 5 MatlabDocument28 pagesLab 5 MatlabMiguel Calle RomeroNo ratings yet
- Architectures For Programmable Digital Signal Processing DevicesDocument24 pagesArchitectures For Programmable Digital Signal Processing DevicesShibani SanaNo ratings yet
- Logical OperationsDocument6 pagesLogical OperationsLysergic WarNrumorNo ratings yet
- Advanced Numerical Methods with Matlab 1: Function Approximation and System ResolutionFrom EverandAdvanced Numerical Methods with Matlab 1: Function Approximation and System ResolutionNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreFrom EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo ratings yet
- LAB 3 - Verilog For Combinatorial Circuits: GoalsDocument7 pagesLAB 3 - Verilog For Combinatorial Circuits: GoalsJoey WangNo ratings yet
- LAB 6 - Testing The ALU: GoalsDocument9 pagesLAB 6 - Testing The ALU: GoalsJoey WangNo ratings yet
- LAB 5 - Implementing An ALU GoalsDocument9 pagesLAB 5 - Implementing An ALU GoalsJoey WangNo ratings yet
- Lab 4 - Finite State Machines: GoalsDocument7 pagesLab 4 - Finite State Machines: GoalsJoey WangNo ratings yet
- Why Systolic ArchitecturesDocument10 pagesWhy Systolic ArchitecturesJoey WangNo ratings yet
- McLean Company HR Trends Webinar Presentation DeckDocument50 pagesMcLean Company HR Trends Webinar Presentation DeckMd. Sahed HossainNo ratings yet
- SAP BAPI Training Material PDFDocument3 pagesSAP BAPI Training Material PDFSubhas Chandra SantraNo ratings yet
- Store Images in SQL Server Using VBDocument3 pagesStore Images in SQL Server Using VBDaryll Joe CananNo ratings yet
- Skripta - Teorija Iz.... (Za Ispit)Document46 pagesSkripta - Teorija Iz.... (Za Ispit)Mahmad FatihNo ratings yet
- Surneco Vs ErsDocument10 pagesSurneco Vs ErsMark Jason Crece AnteNo ratings yet
- Mineral Resources of BangladeshDocument25 pagesMineral Resources of BangladeshFOuadHasan100% (1)
- McLaren 570S COUPE Order SummaryDocument4 pagesMcLaren 570S COUPE Order SummarysolejNo ratings yet
- Experimental Stress Analysis-Chapter 7 PDFDocument6 pagesExperimental Stress Analysis-Chapter 7 PDFSiva SriNo ratings yet
- Mathematics P2 Nov 2016 Memo Afr & EngDocument26 pagesMathematics P2 Nov 2016 Memo Afr & EngThabiso Jimmy LengwateNo ratings yet
- Module 1Document48 pagesModule 1ronaleneoNo ratings yet
- Reliable Distance Protection: Get Precise Line Parameters With The CPC 100 + CP CU1Document3 pagesReliable Distance Protection: Get Precise Line Parameters With The CPC 100 + CP CU1Jonas PedrosoNo ratings yet
- Mathematical Model Prototype To Optimise EngineeriDocument10 pagesMathematical Model Prototype To Optimise EngineeriJawad AhmadNo ratings yet
- Member Full Version: XcopterDocument1 pageMember Full Version: Xcoptersmw54791No ratings yet
- 2 Stage Air Compressor Report PDFDocument31 pages2 Stage Air Compressor Report PDFChandan JobanputraNo ratings yet
- G.R. No. 208912 (Aquino vs. Aquino) (Iron Curtain Rule)Document47 pagesG.R. No. 208912 (Aquino vs. Aquino) (Iron Curtain Rule)Princess Cayabyab100% (1)
- Rate Analysis As Percurrent RatesDocument14 pagesRate Analysis As Percurrent RatesPanyam Babu ShivanandNo ratings yet
- COA's Adjudication FunctionDocument42 pagesCOA's Adjudication FunctiondemosreaNo ratings yet
- Zimbabwe Aviation Contacts and InformationDocument2 pagesZimbabwe Aviation Contacts and InformationFARAI KABANo ratings yet
- Tbu RsDocument9 pagesTbu RsmimramesNo ratings yet
- Pertemuan 1 Auditing 1: Introduction To Auditing and Assurance ServicesDocument36 pagesPertemuan 1 Auditing 1: Introduction To Auditing and Assurance Servicesdina cholidinNo ratings yet
- BSCID (1) Punjab Technical University Jalandhar Syllabus Scheme (1 ST To 6 TH Semester) For BSC in Interior DesigningDocument24 pagesBSCID (1) Punjab Technical University Jalandhar Syllabus Scheme (1 ST To 6 TH Semester) For BSC in Interior DesigningTollamu SanaNo ratings yet
- Morcom Public Safety DASDocument2 pagesMorcom Public Safety DASAla'a AbdullaNo ratings yet
- Women On WheelsDocument19 pagesWomen On Wheelsmaitrishah_18No ratings yet
- The Use of Monitored Attendance SMS System To The Late Students in Unida Christian Colleges A.Y. 2022-2023Document7 pagesThe Use of Monitored Attendance SMS System To The Late Students in Unida Christian Colleges A.Y. 2022-2023Jude De LeonNo ratings yet
- Int J Hydrogen Energy 2004Document7 pagesInt J Hydrogen Energy 2004NicolásRipollKameidNo ratings yet
- Aadipandey Teri MbaDocument101 pagesAadipandey Teri MbaADITYA PANDEY100% (1)
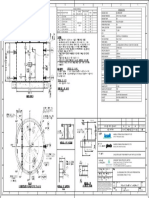
- G.A. Drawing For CITRIC ACID PREPARATION Tank (T-1104)Document1 pageG.A. Drawing For CITRIC ACID PREPARATION Tank (T-1104)Magnum CompositesNo ratings yet
- Porps Prospectus 2022 23Document16 pagesPorps Prospectus 2022 23Siva SubrahmanyamNo ratings yet
- Mohanraj Resume 2019Document4 pagesMohanraj Resume 2019johohiNo ratings yet