Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Art of Botanical IllustrationDocument105 pagesThe Art of Botanical Illustrationpatience7100% (4)
- Technical Manual SABROEDocument288 pagesTechnical Manual SABROEyiannis1786% (14)
- Year 2 - SATs Survival Easter English Revision BookletDocument17 pagesYear 2 - SATs Survival Easter English Revision BookletCristina Guajardo0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
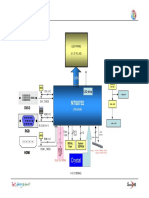
- BEJE2242VA Block Diagram 1670405Document1 pageBEJE2242VA Block Diagram 1670405David RomeroNo ratings yet
- Lesson1 - CRS002 JNDocument13 pagesLesson1 - CRS002 JNHaifa KalantunganNo ratings yet
- Medium Manufacturer-Jewellery 2020Document12 pagesMedium Manufacturer-Jewellery 2020Diamond Big BrokerNo ratings yet
- Best Practice Guide 2021Document14 pagesBest Practice Guide 2021Azme Pak LangNo ratings yet
- 81221H Pressure ENGDocument11 pages81221H Pressure ENGGopal HegdeNo ratings yet
- The Book of Astarte and AstarothDocument11 pagesThe Book of Astarte and Astaroth69bjkf9rbpNo ratings yet
- Searchq Elbow+Mercury+Steering+Pressure&Rlz 1CDGOYI EnAE911AE911&Hl en US&Ei 8kFNZNmIPNmB9u8P1ZaV2Ac&OqDocument1 pageSearchq Elbow+Mercury+Steering+Pressure&Rlz 1CDGOYI EnAE911AE911&Hl en US&Ei 8kFNZNmIPNmB9u8P1ZaV2Ac&Oqt8fn5ykc84No ratings yet
- Greenery and Landscaping 2019 PDFDocument174 pagesGreenery and Landscaping 2019 PDFNeeraj VashistNo ratings yet
- Ngn110 Mce HandoutDocument8 pagesNgn110 Mce HandoutLayan ArefNo ratings yet
- Extra Exercises For Relative ClausesDocument12 pagesExtra Exercises For Relative Clausesfabienne destouesseNo ratings yet
- Stochastic ProcessDocument610 pagesStochastic ProcesshopanzNo ratings yet
- Elec 4 M.salazar Problem Set Ee 3Document2 pagesElec 4 M.salazar Problem Set Ee 3murphy salazarNo ratings yet
- Electric Charges & Fields: Chapter-1 class-XIIDocument20 pagesElectric Charges & Fields: Chapter-1 class-XIIMohit SahuNo ratings yet
- MP 12th Five Year PlanDocument599 pagesMP 12th Five Year Planphilodog100% (2)
- Rhapsody: Actual Design Area: 1" X 2"Document1 pageRhapsody: Actual Design Area: 1" X 2"Anonymous Y2qwEuANo ratings yet
- LPGDocument13 pagesLPGsoheilkhosh3311No ratings yet
- Jmfa02 1990 18to29Document13 pagesJmfa02 1990 18to29Amal MohamedNo ratings yet
- Petzl Sport Catalog 2010 GBDocument81 pagesPetzl Sport Catalog 2010 GBPatrascu Lucian0% (1)
- Ch06 SlidesDocument73 pagesCh06 SlidesbeelzeburtonNo ratings yet
- 3Document14 pages3amk2009No ratings yet
- Engineering Specification For Reinfoced Concrete StuctureDocument12 pagesEngineering Specification For Reinfoced Concrete StuctureTri SuhartantoNo ratings yet
- Romeo and Juliet Movie ComparisonDocument2 pagesRomeo and Juliet Movie Comparisonameanie68100% (2)
- Laminar Air FlowDocument9 pagesLaminar Air FlowsserzadNo ratings yet
- Oil & Gas Magazines With Top 50 Powerful Names in MEDocument76 pagesOil & Gas Magazines With Top 50 Powerful Names in MEGeorge V ThomasNo ratings yet
- Modified GCC Fillers in Printing Paper ProductionDocument7 pagesModified GCC Fillers in Printing Paper ProductionPenkinNo ratings yet
- Control TheoryDocument387 pagesControl TheoryvondutchlgNo ratings yet
- Guide To Waste Sorting: Le Paris Du TriDocument7 pagesGuide To Waste Sorting: Le Paris Du TrivusprrNo ratings yet