Download as ppsx, pdf, or txt
You might also like
- Free Download Here: John P Uyemura Introduction To Vlsi PDFDocument2 pagesFree Download Here: John P Uyemura Introduction To Vlsi PDFThree PlusNo ratings yet
- Pulsar 180 Wiring DiagramDocument1 pagePulsar 180 Wiring DiagramAbdul Khader100% (2)
- Surge Arrester ModelingDocument3 pagesSurge Arrester Modelingummadinagarjunareddy10No ratings yet
- Assignment TheoryDocument11 pagesAssignment TheoryChomfwix VlogsNo ratings yet
- 21EC43-2 Labmanual - ModifyDocument31 pages21EC43-2 Labmanual - ModifybnchoukimathNo ratings yet
- Traiki2018 FormulaDocument6 pagesTraiki2018 FormulaTamilselvanNo ratings yet
- Adaptive PID Interleaved3Document3 pagesAdaptive PID Interleaved3Hattab MakerNo ratings yet
- Current and Voltage: Q I DQ I DT QT ItDocument20 pagesCurrent and Voltage: Q I DQ I DT QT ItPraneetha InumarthiNo ratings yet
- CH 1 SlideDocument35 pagesCH 1 Slide2bd1productionteam1No ratings yet
- Power Electronics Introdution Slides Chapter 1Document36 pagesPower Electronics Introdution Slides Chapter 1magic1111No ratings yet
- Fundamentals of Power Electronics (PDFDrive)Document1,355 pagesFundamentals of Power Electronics (PDFDrive)jeos20132013No ratings yet
- Malariy Teehnologs.: Department FnginceringDocument7 pagesMalariy Teehnologs.: Department FnginceringSmakshi ChoudharyNo ratings yet
- Fundamental of Electrical EngineerDocument71 pagesFundamental of Electrical EngineerRiethanelia UsunNo ratings yet
- Voltage Regulation of Photovoltaic Arrays: Small-Signal Analysis and Control DesignDocument13 pagesVoltage Regulation of Photovoltaic Arrays: Small-Signal Analysis and Control DesignRodrigo DiasNo ratings yet
- ConferanceDocument7 pagesConferanceMohcine MokhlisNo ratings yet
- Det1013 - Electrical Technology: Introduction To Electric CircuitDocument118 pagesDet1013 - Electrical Technology: Introduction To Electric Circuitcaj7687No ratings yet
- 4.1 Electrical QuantitiesDocument78 pages4.1 Electrical QuantitiesDharshaan GopaulNo ratings yet
- A Simplified Matlab Based Simulation of PV Module With Effect of Temperature and IrradiationDocument4 pagesA Simplified Matlab Based Simulation of PV Module With Effect of Temperature and IrradiationerpublicationNo ratings yet
- Fundamentals of Fundamentals of Cicittheo Cicittheo Circuit Theory Circuit TheoryDocument31 pagesFundamentals of Fundamentals of Cicittheo Cicittheo Circuit Theory Circuit TheoryEunmi JeongNo ratings yet
- 2 - Analogue Electonics ST PaulsDocument39 pages2 - Analogue Electonics ST PaulsthuanNo ratings yet
- Basic Electrical EngineeringDocument92 pagesBasic Electrical EngineeringJeffrey ilevbagieNo ratings yet
- Capacitor SwitchingDocument5 pagesCapacitor SwitchingbhuvanesbraveNo ratings yet
- Bee LabDocument68 pagesBee LabwasimchaspraNo ratings yet
- MPPT (PandO-INC-FUZZY-ANFIS) Simulation and Hardware Implementation.Document124 pagesMPPT (PandO-INC-FUZZY-ANFIS) Simulation and Hardware Implementation.farid saadNo ratings yet
- FSM Model of A Simple Photovoltaic System: Martina LATKOVA, Michal BAHERNIK, Marek HOGER, Peter BRACINIKDocument6 pagesFSM Model of A Simple Photovoltaic System: Martina LATKOVA, Michal BAHERNIK, Marek HOGER, Peter BRACINIKBojan BankovicNo ratings yet
- Jee Woolim1999Document3 pagesJee Woolim1999Arabindo ChandraNo ratings yet
- Chapter 08Document33 pagesChapter 08cbcb gdfgsdfNo ratings yet
- Synchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Document5 pagesSynchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Rick MaityNo ratings yet
- Chapter 01 - Introduction To Power ElectronicsDocument23 pagesChapter 01 - Introduction To Power ElectronicsAdelChouderNo ratings yet
- User Manual Machine Lab FullDocument40 pagesUser Manual Machine Lab FullMd. Sojib KhanNo ratings yet
- Simulation of Impulse Generator Followed by Practical VerificationDocument5 pagesSimulation of Impulse Generator Followed by Practical Verificationali esmaeelniaNo ratings yet
- FATEMEH Karimi Pour, MAHROKH Bavandi, AZLI YahyaDocument5 pagesFATEMEH Karimi Pour, MAHROKH Bavandi, AZLI YahyagerdNo ratings yet
- Circuit Simulation Lab 2Document9 pagesCircuit Simulation Lab 2Bhushan RaneNo ratings yet
- Analysed Electrical QueriesDocument33 pagesAnalysed Electrical QueriesmadhivananspNo ratings yet
- Elec Level 5Document108 pagesElec Level 5Timothy Michael NdalaNo ratings yet
- A Quick and Simplified Approach For Understanding The Dynamics of The SEPIC Converter For Low Voltage Applications Simulation StudyDocument4 pagesA Quick and Simplified Approach For Understanding The Dynamics of The SEPIC Converter For Low Voltage Applications Simulation StudyChandra ShettyNo ratings yet
- (B) 18 Pages Converter Dynamics and ControlDocument18 pages(B) 18 Pages Converter Dynamics and ControlClare DianneNo ratings yet
- Module-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeDocument22 pagesModule-5 - INVERTER - VII-POWER ELECTRONICS - 2015-17 SchemeK N DEEPSHINo ratings yet
- Adobe Scan 26 Jan 2023Document15 pagesAdobe Scan 26 Jan 2023karthikeyagajula93No ratings yet
- Circuit TestingDocument22 pagesCircuit TestingAlexandre OliveiraNo ratings yet
- ACFrOgBbD2Sp2EBe3VLqrn31bgIjEvDnkhq7YRTv9n0T6fq4 8Vs4mBeRIEP8Fm3MRcegabpCZ1fbvL9kfkQ9GJQhf7d 2pA8JHi4H0SJDQoNJ5P4avSkYC-ffiUvG8Z1HhQhsCZ0z4Swl-6BYzbDocument70 pagesACFrOgBbD2Sp2EBe3VLqrn31bgIjEvDnkhq7YRTv9n0T6fq4 8Vs4mBeRIEP8Fm3MRcegabpCZ1fbvL9kfkQ9GJQhf7d 2pA8JHi4H0SJDQoNJ5P4avSkYC-ffiUvG8Z1HhQhsCZ0z4Swl-6BYzbvenghadanathaNo ratings yet
- Pe 1Document2 pagesPe 1Vaibhav YadavNo ratings yet
- Chapter 1Document117 pagesChapter 1badrilaminNo ratings yet
- Characterization Switched Converters: Low-Frequency of DC-DCDocument10 pagesCharacterization Switched Converters: Low-Frequency of DC-DCh1169104No ratings yet
- Chaper 6 Dynamic Modeling: Presentation #3Document14 pagesChaper 6 Dynamic Modeling: Presentation #3Sabri BouloumaNo ratings yet
- Eel 6245Document7 pagesEel 6245Fahad AliNo ratings yet
- Chapter 6 - Inductance, Capacitance, and Mutual Inductance PDFDocument44 pagesChapter 6 - Inductance, Capacitance, and Mutual Inductance PDFDaniaNo ratings yet
- Steady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021Document37 pagesSteady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021f789sgacanonNo ratings yet
- Steady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021Document37 pagesSteady-State Equivalent Circuit Modeling, Losses and Efficiency 08312021f789sgacanonNo ratings yet
- Comparative Analysis of MPPT Based Solar Charge ControllerDocument7 pagesComparative Analysis of MPPT Based Solar Charge ControllerMechanical Robot Designers V CreationsNo ratings yet
- PCB Design & Manufacturing CURRICULUMDocument19 pagesPCB Design & Manufacturing CURRICULUMSunita kumariNo ratings yet
- EE-391 Manual 02Document68 pagesEE-391 Manual 02Deb Kumar SarkarNo ratings yet
- ASU-KALIBO IM - : Aklan State University College of Industrial Technology Kalibo, AklanDocument11 pagesASU-KALIBO IM - : Aklan State University College of Industrial Technology Kalibo, AklanAries PenalosaNo ratings yet
- Circuit Analysis IDocument34 pagesCircuit Analysis ITaga Phase 7100% (1)
- Boosted MLIDocument8 pagesBoosted MLIAjmal FarooqNo ratings yet
- Paper 5Document12 pagesPaper 5headerwebNo ratings yet
- Introduction To Power: Unit - 1 ElectronicsDocument41 pagesIntroduction To Power: Unit - 1 ElectronicsDevi Debora SiregarNo ratings yet
- B23CS1044 (Neeraj Kumar) Lab 2Document8 pagesB23CS1044 (Neeraj Kumar) Lab 2b23cs1044No ratings yet
- Lab Manual STDocument68 pagesLab Manual STAlex MutiuNo ratings yet
- Zhang - Performance Prediction of PV ModulesDocument14 pagesZhang - Performance Prediction of PV ModulesosmanalNo ratings yet
- Lecture (2) : Mathematical Modeling of SystemsDocument52 pagesLecture (2) : Mathematical Modeling of SystemsHasan AljabaliNo ratings yet
- Objectives:: The State EquationsDocument12 pagesObjectives:: The State EquationsHasan AljabaliNo ratings yet
- A Survey of Detection and Mitigation Techniques of Primary User Emulation Attacks in Cognitive Radio Networks PDFDocument9 pagesA Survey of Detection and Mitigation Techniques of Primary User Emulation Attacks in Cognitive Radio Networks PDFHasan AljabaliNo ratings yet
- A Survey of Artificial Intelligence For Cognitive Radios-xAc PDFDocument16 pagesA Survey of Artificial Intelligence For Cognitive Radios-xAc PDFHasan AljabaliNo ratings yet
- Frequency DNA and The Human BodypdfDocument6 pagesFrequency DNA and The Human BodypdfRegaldna Felix100% (1)
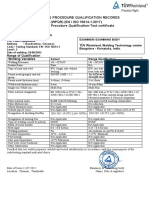
- Welding Procedure Qualification Records (WPQR) (EN / ISO 15614-1:2017) Welding Procedure Qualification-Test CertificateDocument3 pagesWelding Procedure Qualification Records (WPQR) (EN / ISO 15614-1:2017) Welding Procedure Qualification-Test Certificateramesh rajaNo ratings yet
- 17Document5 pages17NelarapuMaheshNo ratings yet
- Test Corrosion October 2015Document7 pagesTest Corrosion October 2015Nitin KumarNo ratings yet
- Toyocool Chiller Controller Manufacturer Instruction ManualDocument17 pagesToyocool Chiller Controller Manufacturer Instruction ManualLucinei ManoelNo ratings yet
- IRB4600 ROB0109EN J datasheet-Rev.KDocument2 pagesIRB4600 ROB0109EN J datasheet-Rev.KGordon NorfcothNo ratings yet
- EC Lab ManualDocument5 pagesEC Lab ManualsruthyNo ratings yet
- Washer Tech Data Sheet: Troubleshoot The Problem by Using Charts On The Pages 3-5. Quick CheckDocument16 pagesWasher Tech Data Sheet: Troubleshoot The Problem by Using Charts On The Pages 3-5. Quick CheckPedro ArceNo ratings yet
- Wideband Doherty Power Amplifier Design For Base Station ApplicationDocument17 pagesWideband Doherty Power Amplifier Design For Base Station ApplicationMatthew CarterNo ratings yet
- LCA Assignment 1 Spring 2023Document6 pagesLCA Assignment 1 Spring 2023Huzaifa Pervaiz MayoNo ratings yet
- CWR-10 (Pharma)Document3 pagesCWR-10 (Pharma)Felix BenzanNo ratings yet
- 1 s2.0 S2666285X22000280 MainDocument6 pages1 s2.0 S2666285X22000280 Main19euec163 TARUN SNo ratings yet
- 17 - Electric FieldsDocument48 pages17 - Electric FieldsKamran KhursheedNo ratings yet
- Eto Mix Question & AnswersDocument14 pagesEto Mix Question & AnswersKidanemariam TeseraNo ratings yet
- PS-M-0263 B PANFILE of TSM - 315 - PC14Document1 pagePS-M-0263 B PANFILE of TSM - 315 - PC14ankitNo ratings yet
- EV Discharging Outlet 3kw-5kw Type 2 V2L Adapter DescriptionDocument1 pageEV Discharging Outlet 3kw-5kw Type 2 V2L Adapter DescriptionHuang MironNo ratings yet
- Ohm's LawDocument2 pagesOhm's LawmarkelsoncandadoNo ratings yet
- ABB A16 40 00Document4 pagesABB A16 40 00aparna.vNo ratings yet
- Experiment No: 4 AIM: To study the applications of IC 741 as Comparator. APPARATUS: IC uA741, Resistors 1KΩ (2), Resistors 10KΩ (1), Function Generator, D.CDocument9 pagesExperiment No: 4 AIM: To study the applications of IC 741 as Comparator. APPARATUS: IC uA741, Resistors 1KΩ (2), Resistors 10KΩ (1), Function Generator, D.CTejinder SinghNo ratings yet
- Ground PracticesDocument3 pagesGround PracticesPaula Almeida CavalcantiNo ratings yet
- Ex No: 1 DateDocument4 pagesEx No: 1 DateVignesh AadhiNo ratings yet
- EEE418 Embedded SystemDocument13 pagesEEE418 Embedded SystemABDULLAH AL BAKINo ratings yet
- LG 50pj250-Ua Chassis Pu01aDocument56 pagesLG 50pj250-Ua Chassis Pu01acentauro2013100% (1)
- ES710 DB enDocument4 pagesES710 DB enPham HoaNo ratings yet
- Chapter 1 - ADocument23 pagesChapter 1 - AAHMAD ASRI ABD SAMATNo ratings yet
- EEC 311 Control Eng. 1Document38 pagesEEC 311 Control Eng. 1Yusuf KehindeNo ratings yet
- Physics Electrostatics 2Document55 pagesPhysics Electrostatics 2kishore_subrama3240No ratings yet
- Ziehm Vision Vario Family Service ManualDocument214 pagesZiehm Vision Vario Family Service ManualdrakonNo ratings yet