Download as docx, pdf, or txt
You might also like
- BCA - 1st - SEMESTER - MATH NotesDocument25 pagesBCA - 1st - SEMESTER - MATH Noteskiller botNo ratings yet
- MATH2101 Cheat SheetDocument3 pagesMATH2101 Cheat SheetWong NgNo ratings yet
- AE 483 Linear Algebra Review PDFDocument12 pagesAE 483 Linear Algebra Review PDFpuhumightNo ratings yet
- Math C1 - Matrices and VectorsDocument14 pagesMath C1 - Matrices and VectorsIvetteNo ratings yet
- Summary QM2 Math IBDocument50 pagesSummary QM2 Math IBIvetteNo ratings yet
- Kashif Khan Assignment of Linear Algebra.Document10 pagesKashif Khan Assignment of Linear Algebra.engineerkashif97No ratings yet
- Linear Algebra Cheat SheetDocument3 pagesLinear Algebra Cheat SheetMiriam Quan100% (1)
- Nda Ex: Study MaterialformathsDocument7 pagesNda Ex: Study MaterialformathsMangsuan mungcheshamNo ratings yet
- 5 System of Linear EquationDocument12 pages5 System of Linear EquationAl Asad Nur RiyadNo ratings yet
- Solving Systems of Linear Equations Using MatricesDocument10 pagesSolving Systems of Linear Equations Using MatricesAsim MalikNo ratings yet
- 1 System of Linear Equations and Their Solutions: An Example For MotivationDocument5 pages1 System of Linear Equations and Their Solutions: An Example For MotivationMehul JainNo ratings yet
- Chapter 15 Linear AlgebraDocument59 pagesChapter 15 Linear AlgebraAk ChintuNo ratings yet
- MathematicsDocument66 pagesMathematicsTUSHIT JHANo ratings yet
- Determinant Basic ConceptDocument12 pagesDeterminant Basic ConceptReena SharmaNo ratings yet
- Linear Algebra IDocument43 pagesLinear Algebra IDaniel GreenNo ratings yet
- Matrices and Linear AlgebraDocument13 pagesMatrices and Linear AlgebraRaulNo ratings yet
- Linear Algebra: Chapter 2: Systems of Linear EquationsDocument32 pagesLinear Algebra: Chapter 2: Systems of Linear EquationsYusri Abu BakarNo ratings yet
- Reduced Row EchelonDocument4 pagesReduced Row EchelonNishant PandaNo ratings yet
- Cu 3Document39 pagesCu 3omgitsjediNo ratings yet
- VCLA ALA DIV-C Group 12Document13 pagesVCLA ALA DIV-C Group 12Parth GajjarNo ratings yet
- Egm4313 Exam1 Review StaticsDocument3 pagesEgm4313 Exam1 Review StaticsMark ViauNo ratings yet
- 2.7.3 Example: 2.2 Matrix AlgebraDocument8 pages2.7.3 Example: 2.2 Matrix Algebrafredy8704No ratings yet
- Linear Algebra NotesDocument6 pagesLinear Algebra NotesAngela ZhouNo ratings yet
- Maths 2 For Eng - Lesson 1Document9 pagesMaths 2 For Eng - Lesson 1Abdulkader TukaleNo ratings yet
- Mth501 Midterm Short Notes 1 To 18Document53 pagesMth501 Midterm Short Notes 1 To 18omersaleemNo ratings yet
- Usme, Dtu Project On Matrices and Determinants Analysis BY Bharat Saini Tanmay ChhikaraDocument17 pagesUsme, Dtu Project On Matrices and Determinants Analysis BY Bharat Saini Tanmay ChhikaraTanmay ChhikaraNo ratings yet
- Eigenvalues of GraphsDocument29 pagesEigenvalues of GraphsDenise ParksNo ratings yet
- Matrix and Determinants NotesDocument7 pagesMatrix and Determinants NotesYash TiwariNo ratings yet
- MTH501 Quiz-1 by Attiq Kundi-UpdatedDocument14 pagesMTH501 Quiz-1 by Attiq Kundi-UpdatedAbdurrehman M.IbrahimNo ratings yet
- Basic Mathematical FoundationsDocument60 pagesBasic Mathematical Foundationsayush247No ratings yet
- 1 Linear AlgebraDocument5 pages1 Linear AlgebraSonali VasisthaNo ratings yet
- MatrixDocument44 pagesMatrixJomil John ReyesNo ratings yet
- Linear Algebra Test 1 ReviewDocument5 pagesLinear Algebra Test 1 Reviewjohn doeNo ratings yet
- Module 1 Theory of MatricesDocument75 pagesModule 1 Theory of MatricesShashank MahaleNo ratings yet
- Mat133 Reveiw NotesDocument27 pagesMat133 Reveiw NotesDimitre CouvavasNo ratings yet
- LAO MatricsDocument4 pagesLAO Matricshodcommerceeve rkmvcNo ratings yet
- Class 10 Notes (Filled)Document12 pagesClass 10 Notes (Filled)2kt2j5dwy6No ratings yet
- Engg AnalysisDocument117 pagesEngg AnalysisrajeshtaladiNo ratings yet
- Matrix EquationsDocument40 pagesMatrix EquationsMohan RajNo ratings yet
- Math Majorship LinearDocument12 pagesMath Majorship LinearMaybelene NavaresNo ratings yet
- WEEK 5-StudentDocument47 pagesWEEK 5-Studenthafiz patahNo ratings yet
- 1.4 Matrices and Matrix Operations: Definition: A Matrix Is A Rectangular Array of Numbers. The Numbers in The ArrayDocument6 pages1.4 Matrices and Matrix Operations: Definition: A Matrix Is A Rectangular Array of Numbers. The Numbers in The ArrayAMIR ALINo ratings yet
- Solution For Linear SystemsDocument47 pagesSolution For Linear Systemsshantan02No ratings yet
- Rank of A MatrixDocument4 pagesRank of A MatrixSouradeep J ThakurNo ratings yet
- Fom Assignment 1Document23 pagesFom Assignment 11BACS ABHISHEK KUMARNo ratings yet
- Eigenvalues and Eigenvectors: An: Example. Consider The MatrixDocument23 pagesEigenvalues and Eigenvectors: An: Example. Consider The MatrixlsvikneshNo ratings yet
- MR 2015matricesDocument9 pagesMR 2015matricesManisha AldaNo ratings yet
- Algebra MatricialDocument17 pagesAlgebra MatricialjoelmulatosanchezNo ratings yet
- MATH219 Lecture 7Document16 pagesMATH219 Lecture 7Serdar BilgeNo ratings yet
- Determinants, Part II Math 130 Linear AlgebraDocument6 pagesDeterminants, Part II Math 130 Linear AlgebraCody SageNo ratings yet
- Soci709 (Formerly 209) Module 4 Matrix Representation of Regression ModelDocument19 pagesSoci709 (Formerly 209) Module 4 Matrix Representation of Regression ModelwerelNo ratings yet
- Maths CH 2@2014Document33 pagesMaths CH 2@2014ALEMU TADESSENo ratings yet
- Review Materi Matriks 1Document23 pagesReview Materi Matriks 1Nafiah Sholikhatun jamilNo ratings yet
- 124 - Section 1.2Document41 pages124 - Section 1.2Aesthetic DukeNo ratings yet
- WIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFDocument177 pagesWIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFEswar RcfNo ratings yet
- Lec 8 (MTH100) Matrices and DeterminesDocument9 pagesLec 8 (MTH100) Matrices and Determinesswatkhan3958No ratings yet
- Linear Algebra Linear Equation To GaussDocument41 pagesLinear Algebra Linear Equation To GaussKhemme Lapor Chu UbialNo ratings yet
- Systems of Linear EquationsDocument10 pagesSystems of Linear EquationsDenise ParksNo ratings yet
- Factoring Part 2 Diff 2 SQJ Sum and Diff of 2 Cubes Year2Document15 pagesFactoring Part 2 Diff 2 SQJ Sum and Diff of 2 Cubes Year2BarbieNo ratings yet
- Operations On Radical ExpressionsDocument28 pagesOperations On Radical ExpressionsMiiMii Imperial Ayuste50% (2)
- MATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Document32 pagesMATLAB Programming Tutorial - Version 05-: Electromagnetic Fields Theory (BEE3113)Johnjoseph Vera100% (1)
- Imaginary and Complex NumbersDocument23 pagesImaginary and Complex Numbersbrowniezboy100% (1)
- 11 Annual Harvard-MIT Mathematics TournamentDocument3 pages11 Annual Harvard-MIT Mathematics TournamentHaikal M RoyyanNo ratings yet
- Spatial Descriptions & Transformations: Berke GürDocument47 pagesSpatial Descriptions & Transformations: Berke GürOmar Seraj Ed-DeenNo ratings yet
- 430258214maths Psa Quantitative Aptitude For Class Ix and X 2014-15Document95 pages430258214maths Psa Quantitative Aptitude For Class Ix and X 2014-15jpsmu09100% (1)
- Addition and Subtraction of FractionsDocument3 pagesAddition and Subtraction of FractionsMuhammad Mubin MaqbaNo ratings yet
- Math Baby Thesis - JovenDocument12 pagesMath Baby Thesis - JovenJoven MadrigalNo ratings yet
- B.sc. MathematicsDocument7 pagesB.sc. Mathematicsusmantahir73% (30)
- Number Theory by Naresh Vasant Afre 08 April 2022Document31 pagesNumber Theory by Naresh Vasant Afre 08 April 2022Swapnil OzaNo ratings yet
- Invers Transformasi LaplaceDocument2 pagesInvers Transformasi LaplaceMuhammad SatrioNo ratings yet
- Class 10 - Maths - MatricesDocument39 pagesClass 10 - Maths - Matricesanirahul jtNo ratings yet
- Linear Transformations and MatricesDocument6 pagesLinear Transformations and MatricesRaulNo ratings yet
- Ncert Exemplar Nov2020 Class 7 Maths Solutions Chapter 4Document18 pagesNcert Exemplar Nov2020 Class 7 Maths Solutions Chapter 4Chandra ReddyNo ratings yet
- Nurcy Maths AssignmentDocument3 pagesNurcy Maths AssignmentAmon KapelaNo ratings yet
- Lecture-4: Basic Feasible SolutionDocument7 pagesLecture-4: Basic Feasible SolutionsatyajitNo ratings yet
- Math 110: Linear Algebra Homework #7: 2.6: Dual SpacesDocument8 pagesMath 110: Linear Algebra Homework #7: 2.6: Dual SpacesCody SageNo ratings yet
- Number SlideDocument33 pagesNumber SlideCristeena Merin MathewNo ratings yet
- Math Grade 7 Q1 Module 4.1 Properties On Operations of IntegersDocument8 pagesMath Grade 7 Q1 Module 4.1 Properties On Operations of IntegersKitty GengNo ratings yet
- Topic 1B. Complex Numbers - MatricesDocument60 pagesTopic 1B. Complex Numbers - MatricesJessicaNo ratings yet
- Math 8 Consolidation - Lesson 2Document32 pagesMath 8 Consolidation - Lesson 2Jessa CanopinNo ratings yet
- Solutions Manual To Accompany A Graphical Approach To Algebra and Trigonometry 5th Edition 9780321644725Document37 pagesSolutions Manual To Accompany A Graphical Approach To Algebra and Trigonometry 5th Edition 9780321644725graysonsan0wtc100% (16)
- Evans M. Harrell II James V. Herod: Linear Methods of Applied Mathematics andDocument4 pagesEvans M. Harrell II James V. Herod: Linear Methods of Applied Mathematics andjaved shaikh chaandNo ratings yet
- Mathematical Methods, Michaelmas 2009: Prof. F.H.L. Essler October 27, 2009Document89 pagesMathematical Methods, Michaelmas 2009: Prof. F.H.L. Essler October 27, 2009Roy VeseyNo ratings yet
- OLD Is GOLD 05 IPM 2024 Functions Maxima MinimaDocument7 pagesOLD Is GOLD 05 IPM 2024 Functions Maxima MinimasamyakkatariaamityNo ratings yet
- FG ModuleDocument6 pagesFG ModulePrivate27No ratings yet
- Unit 1.2 Worksheet 1 - Indentifying and Evaluating FunctionsDocument3 pagesUnit 1.2 Worksheet 1 - Indentifying and Evaluating FunctionsFrankie Rose IIINo ratings yet
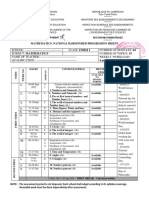
- MATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Document14 pagesMATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Valere DJOHNo ratings yet
- Synthetic Division of PolynomialsDocument2 pagesSynthetic Division of PolynomialsJerson YhuwelNo ratings yet