Professional Documents
Culture Documents
C11-Schindler-MX-GC Release 4 MRL. Basic Maintenance Tasks
C11-Schindler-MX-GC Release 4 MRL. Basic Maintenance Tasks
Uploaded by
ElputoAmo XDOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
C11-Schindler-MX-GC Release 4 MRL. Basic Maintenance Tasks
C11-Schindler-MX-GC Release 4 MRL. Basic Maintenance Tasks
Uploaded by
ElputoAmo XDCopyright:
Available Formats
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.
0
Date :June-2019
Page : 1/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
BASIC MAINTENANCE TASKS
The purpose of this manual is to provide to the service mechanics the procedures for
perform the main operations to be done during the regular maintenance visits,
including code tests, in Non OTIS units. Only the relevant operations (those which must
be done following a special procedure) are described.
If during the maintenance operations in this model you find any task that can’t be done
following the OTIS procedures and is not described here, please contact with EMEA
Non OTIS Support Center (EMEA.SupportNOE@otis.com).
According to EN81 standard, installer must provide an instruction manual of the lift.
This manual includes detailed information about maintenance tasks and code tests
procedures. Please, request this manual to customer.
All jobsite work activity must be in full compliance with Otis World Wide Jobsite Safety Standards
(WWJSSS). When carrying out this procedure particular consideration should be given to control of the
elevator, LOTO, hoisting and rigging, ensuring public safety (signs and barriers), working in close proximity of
unguarded rotating equipment (sheaves) and the wearing of appropriate PPE (hand gloves, etc.). It is
required that the mechanic(s) carrying out the repair complete the appropriate JHA for the task at hand to
familiarize themselves with the work environment. If you are unsure of the WWJSSS standards in regard to
the work task at hand, immediately stop work and refer to your Supervisor.
OTIS Elevator Cardinal Rules
ALWAYS use fall protection when a fall hazard exists.
ALWAYS lock and tag out equipment when power is not required.
ALWAYS control live electricity and rotating equipment when working within close
proximity of the hazard.
ALWAYS establish and maintain control of the elevator prior to accessing/egressing the
hoistway, working on the car top, and in the pit.
ALWAYS follow proper jumper procedures.
ALWAYS use certified and inspected hoisting and rigging equipment.
NEVER ride the car top with the elevator in normal operation.
NEVER work above or below others when working in the hoistway.
No team members are to use the tools, materials, or methods described in this
document without reading, following, and understanding the document prior to the
commencement of the work or task.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 2/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
SUMMARY
A. GENERAL INFORMATION
1. GENERAL DESCRIPTION OF THE PRODUCT 3
2. BOARDS LOCACTION AND CONNECTION OVERVIEW 4
3. GENERAL DESCRIPTION OF THE EMBEDDED USER INTERFACE 5
4. TOP OF CAR ACCESS PROCEDURE 5
5. PIT ACCESS PROCEDURE 7
6. SPECIAL TOOLING REQUIRED FOR MAINTENANCE 7
7. HOW TO MAKE CALLS FROM THE LANDING PANEL 8
8. HOW TO DISABLE DOOR OPERATIONS 8
9. LOCK OUT OF MAIN ELECTRICAL SWITCHES 8
B. MAINTENANCE TASKS
1. ROPES INSPECTION 9
2. HOW TO CHECK LOADWEIGHING DEVICE 9
3. TEST OF EMERGENCY CAR LIGHT AND ALARM 9
4. TEST OF MANUAL RESCUE OPERATION 10
5. TEST OF CAR SAFETY GEAR WITH EMPTY CAR AND LOW SPEED 11
6. TEST OF FINAL LIMITS (KNE) 11
7. ADHERENCE TEST 12
8. RUN TIME LIMIT TEST (DDP) 13
9. INSPECTION LIMIT SWITCH 13
10. BRAKE TEST: EMPTY CAR UPWARDS STOPPING DISTANCE 13
11. BRAKE MAINTENANCE 15
12. ONE SHOE BRAKING TEST UPWARDS 18
13. VF FAN TEST 20
14. POSITIONING SYSTEM MAINTENANCE 21
C. BASIC CALLBACKS SOLUTION
1. HOW TO CHECK THE SAFETY CHAIN FROM LANDING PANEL 22
2. HOW TO RESET PERMANENT ERROR 23
3. HOW TO RESET LIFT FROM TOP OF THE CAR 24
4. HOW TO CHECK ERROR LOG 24
D. MAIN ADJUSTMENT PROCEDURES
1. LEARNING RUN 25
2. ADJUST FLOOR LEVELS 25
3. LOADWEIGHING DEVICE CALIBRATION 25
4. VF DRIVE REPLACEMENT 25
5. GCIOB BOARD REPLACEMENT 26
6. LON NODE REPLACEMENT 26
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 3/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
A. GENERAL INFORMATION
1. GENERAL DESCRIPTION OF THE PRODUCT
Eurolift is a model from Schindler for both modernizations and new installations. It was released around 2000
and was discontinued around 2014, replaced by Schindler 5500.
This manual is focused on the machine room less version of the product but most of the contents apply also to
the machine room version.
VF drive VF11/22/33/44 BR (not
regenerative)
LWD at dead hitch end
Gearless machine (PMS420,
PMS230, SM250)
Foldable platform
(access to Top of Car not allowed)
Typical VF
door drives
(LUST,
Typical COP IDD3000)
Controller cabinet for
Miconic MX-GC at top
landing
Note: Pictures show the
typical components but
Typical landing fixtures (also allows BIO devices
several others can be used. and Schindler’s destination dispatch Miconic 10)
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 4/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
2. BOARDS LOCATION AND CONNECTION OVERVIEW
Hoistway
Landing cabinet headroom
Positioning system (on top of car)
KUET/RKUET AGSI/ALSIS
VF Drive
Machine
ASIXA
GCIOB
RECPCB
LONIC
PDB (Power Distribution
Board)
BCM (Brake Control
Top of Car Module)
LONIBV LONLMDMS (Load
Weighing Device)
LONCOP COP
LONDY NWDY
NWPB5 NWPB5 NWPB5
LONDI NWDI
Digital signals
LON-C Bus NWPBU
LONCUS
LON-S Bus NWPBD
NWDB
NWSI Bus
RS-422 Bus LONPBD
NWSL
Detailed explanations can be
found in training documents Hoistway
at EMEA FOD website.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 5/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
3. GENERAL DESCRIPTION OF THE EMBEDDED USER INTERFACE
ASIXA board includes a user interface which provides useful information to service mechanic.
Communication info
SK
Chip Card
ETHERNET
T1 T2 T3A T3B T4 T5
Lift identification zone Safety chain checking
COM
BATT
points
Rx
CCS Lift ID NGL
Tx DUEISK-A NGO Power supplies info
LON LR-U 2NG
JMOF selector 1↔ LUET O
LTRT
(installation mode) 0 JMOF LR-D
Car position
and door zone
ESC ▲ ▼ OK
Service tool (SMLCD)
(SMLCD)
For detailed information about this user interface, please check “Field Manual Schindler MX-GC Release 4.
Service interface manual” in EMEA FOD website.
4. TOP OF CAR ACCESS PROCEDURE
In Eurolift model the machine interferes with the car overrun. Therefore, it is not allowed to access to top of
the car. Instead of this, a foldable platform has been installed for maintenance purposes. This platform can be
unfolded from within the car and allows the mechanic to work on the hoistway items and travel in inspection
mode in a non-hazardous position.
Platform has safety contacts which make not possible to travel in normal when platform is unfolded.
The following is a schematic description about how to unfold the platform.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 6/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Due to this special situation (access to top of car not allowed, safety contacts in the platform), a special
procedure for getting access to the platform and move the lift in inspection has been developed. The
procedure is as follows:
Access to platform must be carried out from the landing where the controller is located (typically, the top
floor) because JRH switch (equivalent to ERO in OTIS) will be used during the process.
a) Make a hall call from the landing where the controller is located.
b) Make two car calls, one to the floor immediate below and the other to the bottom floor (call to bottom
floor assures that the downwards travel command is hold during the process and, thus, the efficiency
of the test is improved).
c) Open the landing door when top of the car is approximately at the landing level. Make a hall call and
wait about 10 seconds (this is for testing the landing door lock of the access floor).
d) Close the door and make a hall call again to the access floor.
e) Open the controller cabinet and, once the car doors are fully opened, switch JRH. By doing this, lift is
not in Normal mode but in the equivalent to ERO mode.
f) Make a car call. Car should not be registered. Therefore, JRH is working and lift is not in normal but
under the control of the mechanic.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 7/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
g) Get access to car and unfold the platform (be cautious and hold the platform during the process
because, even when the platform has a latch for preventing it to fall down, it could get released and fall
free). Put the platform on the working position unfolding and securing the ladder and go back to the
controller.
h) Switch JRH to Normal and make a car call. Call should not be registered, what means the contacts of
the platform avoid the lift to work in normal with platform unfolded. Switch back JRH to “ERO”
position and close the controller cabinet.
i) Jump to the platform and put the lift in Inspection mode on top of the car.
j) Press down button on Inspection Box. Doors should begin to close. Release the button when doors are
halfway to the closed position. (This verifies the inspection box works properly).
k) Press Stop push button on Inspection Box and, again, press the down button in inspection. Doors
should not move, what means the Stop push button is working properly.
l) Release Stop and check the performance of the lift in inspection mode by making short runs
downwards first and upwards afterwards. Once checked both directions work properly, it is allowed to
travel in Inspection as needed.
m) Remember to push Stop every time the car is stopped.
EXITING FROM THE PLATFORM
a) Travel in inspection mode to the top floor (or the top where the controller cabinet is located) and stop
the car at door zone trying to not overpass the landing level. Press Stop on top of the car.
b) Press the Stop of the door drive in order to cut the power off to the door drive and make possible to
open the doors manually.
c) Put the Inspection switch back to Normal and release the STOP push button.
d) Release the Stop of the door drive, go down from the platform, open the controller cabinet and confirm
the JRH switch is in “ERO” position.
e) Fold the car platform and put it back to its normal position, checking carefully that it is properly fitted.
f) Switch JRH to Normal position and check the lift works properly.
5. PIT ACCESS PROCEDURE
There is nothing special in Eurolift regarding the pit so the OTIS procedure according with the WWJSS can be
followed.
6. SPECIAL TOOLING REQUIRED FOR REGULAR MAINTENANCE
Both Service Tool (SMLCD) and ERO box (JRH according with Schindler terminology) are included on the
ASIXA board. Therefore, the only tool needed for the regular maintenance tasks is the bolt for blocking
partially the brake of the machine in order to perform the one shoe braking test. This bolt can be found usually
inside the controller cabinet.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 8/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Figure 1: Locking bolt for PMS230
machines. Part number: Unknown.
Figure 2: Locking bolt for PMS420
machines. Part number: SHR-128613
Figure 1 Figure 2
7. HOW TO MAKE CALLS AND DOOR COMMANDS FROM THE LANDING PANEL
It is possible to make car calls by using the embedded service tool (SMLCD). For doing so, from the main
screen press OK and, once the menu tree is shown, use the arrows for navigate and go to the option
COMMANDS Car Calls. Destination floor and landing (when double entrance) have to be introduced.
After confirmation by pressing OK, car call is performed. This menu can be accessed from any other menu by
pressing simultaneously the keys ESC and OK.
It is also possible to make floor calls in the menu option COMMANDS Floor Calls. Floor and landing
(when double entrance) from where the call is made have to be introduced and whether the call will be an up or
a down call. After confirmation by pressing OK, floor call is performed.
In order to make door operations, go to COMMANDS Doors. For lifts with double entrance, front or rear
landing can be selected and, once the landing has been chosen, the system allows opening or closing it. After
confirmation by pressing OK, door operation is performed.
8. HOW TO DISABLE DOOR OPERATIONS
In Order to disable door operations (DDO in OTIS acronyms) SMLCD can be used. From main screen, press
OK and, once the menu tree is shown, use the arrows for navigate and go to the option COMMANDS
Special Trips KFM and press OK. KFM is a special mode of operation of the lift that, when enabled,
makes the lift to don’t perform door operations nor attend calls. Service mechanic can send the car to the top
and bottom floors with the commands DFM-U and DFM-D (in the same menu than KFM). Car calls without
door operation can be done as well from the SMLCD.
9. LOCK OUT OF MAIN ELECTRICAL SWITCHES
Note: this is for reference only. Check wiring diagram of your jobsite.
The main switches located in the controller cabinet and that could be necessary to lock out are:
JH (3 phases main switch) Disconnects everything but the lighting system.
SIS disconnects brake module, door motor, NGL power supply and governor remote tripping coils.
SIL and JFIL Car lighting and sockets (in controller cabinet, pit and headroom if any).
SIBS Hoistway lighting.
JHO disconnects optional power supplies (NGO).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 9/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
B. MAINTENANCE TASKS
1. ROPES INSPECTION
Schindler’s Eurolift uses standard steel traction ropes so they can be inspected following the OTIS procedures
for these tasks.
2. HOW TO CHECK LOAD WEIGHING DEVICE
Load information is shown directly on the main screen (Status Lift) of the SMLCD. It is updated in real time
so putting load in car should have immediate effect
on the value shown in this screen (value is shown as
a percentage of the nominal load).
If nothing is shown in this position of the screen, it
means load weighing device is disabled.
If load indication doesn’t match with load in car,
recalibrate the load weighing device (procedure is
described in SMLCD User’s Manual).
In order to check the overload performance, do as
follows:
Put load in car and check the load percentage value shown on the screen (let’s call it X).
In menu Parameters Drive Settings, check the parameter Nominal Load (let’s call it Y)
Change the Nominal Load to a value X∙Y/110 and press OK. Go back to main screen (press at the same
time the keys ESC and ▲) and check the value is now 110%. The lift should be out of service, the
overload buzzer sounds and overload indication is shown on COP.
Set back the Nominal Load parameter to its previous value and check the load indication is according with
the load in car.
3. TEST OF EMERGENCY CAR LIGHT AND ALARM
Make a car call to the top landing and, once the doors are opened, put the lift in JRH (equivalent to ERO) mode.
Switch off JFIL in the controller cabinet and check the emergency car light is in operation.
Press the alarm button in car and check the buzzer sounds and phone call with the call center is established.
Check the performance of microphone and loudspeaker in COP are good. Check as well that proper lights in car
for “Alarm sent” and “Help is coming” turn on.
Switch on JFIL, put JRH back in Normal position, and check the lift works in Normal mode.
Wait a few minutes in order to check the alarm has been properly acknowledged and, therefore, the
communication device doesn’t try to call again to the call center.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 10/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
4. TEST OF MANUAL RESCUE OPERATION
Depending on the type of machine, the rescue operation is carried out manually with a lever connected by a
Bowden cable to the machine or electrically by supplying the brake directly from a battery through two buttons
(DEV and DEV1) in the controller cabinet.
Manual rescue device Electric rescue device
The general procedure is as follows:
Switch off main switch (JH) in controller cabinet. All devices (except lighting circuit) are disconnected but
ASIXA board remains powered by the battery included in the controller. If this is not the situation, replace the
battery.
Press arrows keys ▲ and ▼ at the same time in the SMLCD. Leds LR-U, LUET and LR-D LR-U
should turn on at the same time (this allows to be sure that, when performing manual rescue LUET
operation, information about door zone and movement direction is available). LR-D
Check the car position information in the screen: while powered by
battery, SMLCD screen shows on the bottom line the distance (in cm)
from the current car position to the nearest landing (+ sign means the
nearest landing is above the car position, - means the nearest landing is
below). The internal level of the nearest floor is shown on the second row.
Release the brake using the lever or pressing DEV and DEV1 buttons at the same time. Check the position
(with the indication of the bottom line of SMLCD) and direction (LR-U is on when going up, LR-D is on when
going down) of the car. If speed reaches 0,3 m/s a buzzer sounds (WARNING: Speed is not automatically
limited so immediately release the lever/buttons if car speeds up too much).
Once the door zone is reached (LUET led turns on), release the lever/buttons, open the door and rescue the
passengers.
Check that instructions about the rescue procedure are available on the cover of the controller cabinet.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 11/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
5. TEST OF CAR SAFETY GEAR WITH EMPTY CAR AND LOW SPEED
Make a car call to the top landing. Check there is nobody in car.
Leave the car to open and close the doors and then put the lift in JRH mode.
Move the car downwards in JRH mode and, at the desired moment (car speed
can be checked with SMLCD), engage the safeties by pressing the button DBV
located in the controller cabinet. Car stops and error message is shown in
SMLCD.
Move again the car downwards in JRH. Car should keep stopped (speed
shown in SMLCD is 0.0 m/s but machine should keep rotating (noise from the
machine can be heard from the top landing). Release the JRH down direction
button.
Open the landing door and check the position of the car. Close the door and try to move the car downwards
again for a 4-5 seconds. Open again the landing door and check the car didn’t move.
Put the lift in Normal mode and check the safety chain is opened (at least leds T3B, T4 and T5 should be
off). Switch back to JRH.
Move the car upwards in JRH mode in order to disengage the safeties. The contact in car for the safety gear
(KF) should reset automatically. It could be necessary to reset the governor contact (KBV) and/or the governor
tension device contact (KSSBV).
Reset the error: with the lift in JRH, press Stop (JHM), press and release both upwards and downwards
buttons at the same time, release JHM and switch JRH to Normal. Car should make a correction run
(synchronization run according with Schindler naming) to the nearest floor. Check the proper performance.
6. TEST OF FINAL LIMITS (KNE)
MX-GC control system includes a Test function (KNE) which moves the car from the top/bottom landing
towards the hoistway end for an adjustable distance. Setting this distance longer than the KNE actuation
distance, the performance of this contact can be checked. The procedure would be as follows:
Make a car call to the top landing. Check there is nobody in car.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On).
Using the SMLCD, go to menu TESTS Acceptance Tests KNE Test. SMLCD asks for the distance
we want to move the car. Key in a distance between 120 mm and 200 mm and press OK.
Lift will move towards the hoistway ends for the distance we keyed in (control system automatically detects
the car position; if it is located at the top landing, movement is upwards; if it is located at the bottom landing,
movement is downwards).
When the limit switch (KNE-U) opens the contact of the safety chain, car stops and distance from the
landing level is shown. Check safety chain has opened at the proper checking point (T1 and T2 led are both on,
all the others are off).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 12/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Put the lift in JRH mode and move the car towards the landing level. Put the lift back to Normal and check
the proper performance.
For checking the bottom limit switch (KNE-D), send the car to the bottom landing using the SMLCD and
repeat the process.
Once the tests have finished, put the lift back in service (with SMLCD, go to Commands Special trips
KFM Off).
7. ADHERENCE TEST
The purpose of this test is to check that ropes slip over the traction sheave when moving the car upwards in
ERO mode while counterweight is on its buffers. If car is lifted in this condition, there is a safety risk and
containment actions have to be taken.
The procedure is as follows:
Make a car call to the top landing. Check there is nobody in car.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On).
Using the SMLCD, go to menu TESTS Acceptance Tests Traction (t19) Test. Screen shows
“Begin”.
Put the lift in JRH (ERO) mode and move the car upwards until counterweight strikes the buffers and ropes
slip over the traction sheave. Drive will automatically block the lift after about 2 seconds of slippage. SMLCD
will show the distance of slippage in cm. If test is successful, “1” will be shown on the SMLCD; if it is
unsuccessful, “0” will be shown.
If it were necessary to check the slippage directly, it is possible to watch the traction sheave while moving the
car upwards in inspection mode from the foldable platform. For doing this, it is required to bridge the contact
KWL in the safety chain and place the SKS shunt on ASIX board as well (it shunts the limit switches).
Normally there is a set of connectors in the controller cabinet for making these bridges.
Move the car downwards until the top landing level is reached, remove the bridges, switch from INS to
normal on top of the car, fold the platform and put JRH switch in Normal mode. Check the lift works
properly by making car calls from SMLCD.
Put the lift back in service (with SMLCD, go to Commands Special trips KFM Off).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 13/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
8. RUN TIME LIMIT TEST (DDP)
The purpose of the test is to check the travel limit protection is enabled and working: if car has not reached the
destination landing after a defined time (adjustable) from the run command, an emergency stop is performed in
order to protect the motor and avoid slippage which could damage sheave and ropes.
The procedure is as follows:
Make a car call to the top landing. Check there is nobody in car.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On).
Using the SMLCD, go to menu TEST Acceptance Tests Trip Time (t37) Test.
Once OK key is pressed, SMLCD request the desired limit time. Key it in (in seconds) and press OK. Screen
shows “Begin”.
Make a Car Call (pressing simultaneously keys ESC and OK the car calls screen is shown in SMLCD). Car
begins the travel and, once the limit time has elapsed, an emergency stop is performed. Display shows
“Success”. Trip limit time automatically is set back to its previous value.
Reset the fatal error and put the lift back in service (with SMLCD, go to Commands Special trips
KFM Off).
9. INSPECTION LIMIT SWITCH
Miconic MX-GC control system has an absolute encoder on top of the car for measuring the car position.
Information about the car position is not lost not even after main power down. Therefore, lift never needs a
correction run so equivalent signals to 1LS and 2LS are not used. It is used neither an equivalent to 5LS or 6LS
signals for inspection run limits: when moving downwards in inspection, car stops at landing level; when
moving upwards, in order to prevent the mechanic to hit with the machine, car stops at a distance that can be set
with the parameter KSERE_Dist. (in menu Parameters Traction General; requires Login first).
In order to check the proper setting of this parameter, once car is at the top landing, unfold the maintenance
platform and move upwards in Inspection mode until the car stops. Check that no more upwards runs are
allowed. From this position, check the distance from the platform to the machine. It should be about 2000 mm
in order to prevent the mechanic to hit with the machine.
If KSERE_Dist requires readjustment, place the platform at the desired height and measure the distance
between the platform and the top landing door sill. Key in this data as new setting for KSERE_Dist.
In order to permanently store the new setting in EEPROM, in SMLCD go to Commands Drv. End
Commision and press OK (requires Login first).
10. BRAKE TEST: EMPTY CAR UPWARDS STOPPING DISTANCE
The purpose of this test is to check the machine brake is able to stop the car when travelling at nominal speed
and with a deceleration not higher than the one stated in the code. In order to do this, MX-GC control system
includes a Test (Brake Test) which shows the deceleration of the car when an emergency stop is performed.
The procedure is as follows:
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 14/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Make a car call to the top landing. Check there is nobody in car.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On). Use the SMLCD for sending the car to the bottom landing.
Using the SMLCD, go to TESTS Acceptance Tests Brake Test (t14). Screen shows “Running”.
Make a call to the top landing (pressing simultaneously keys ESC and OK the car calls screen is shown in
SMLCD). When the car reaches the nominal speed (current speed can be checked in the SMLCD display) press
JHM button (Stop button in ASIX). Emergency stop is performed and SMLCD shows the deceleration of the
car during this stop.
For PMS230 machine, deceleration should be at least 1.000 mm/s2. For PMS420 machine, deceleration
should be at least 500 mm/s2. For other machines, if there are no manufacturer data about deceleration, it is
normally accepted that it to be between 600 and 800 mm/s2.
Release the JHM button. Car should perform a correction run to the nearest landing.
Once the tests have finished, put the lift back in service (with SMLCD, go to Commands Special trips
KFM Off).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 15/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
11. BRAKE MAINTENANCE
PMS230 machine:
Brake torque cannot be readjusted. If brake tests fail, replace the brake.
Airgap checking and adjustment:
Make the counterweight to rest on its
buffer and unfold the maintenance
platform.
Remove the rubber cover for dust (1).
Using a gauge, check the airgap between
the disk of the armature (5) and the
magnet (3). The proper gap is 1 mm.
For readjust:
o Loosen the safety nut (2), accessible
from the sheave side, and the nut of
the armature (4).
o Using an Allen key with the central
bolt, adjust the airgap. If it is not
possible to get an airgap greater than
1mm, replace the magnet.
o Once a 1mm airgap is achieved,
fasten nut (4) and safety nut (2). Put
the rubber cover back in place.
o Repeat the procedure for the other
brake.
Brake switches (KB and KB1) checking and adjustment:
Check there are no KB faults logged in the Error Log.
Check with leds KB and KB1 on BCM board that switches change
their state when brake opens and drops.
For readjust (in case of fault or switch replacement):
o Make the counterweight to rest on its buffer and unfold the
maintenance platform.
o With brake dropped, loosen the nut (2) and tighten the bolt (1)
until the switch (4) is actuated.
o Place a 0,4 mm gauge between the bolt (3) and the contact (4)
and loosen the bolt until the switch is deactivated.
o Fasten the nut (2).
o Repeat the same with the other brake switch.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 16/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
PMS420 Machine:
Brake torque cannot be readjusted. If brake tests fail, replace the brake.
Airgap checking and adjustment:
Make the counterweight to rest on its buffer and unfold the
maintenance platform.
Before checking the airgap, confirm that the safety nut (5) is
tightened.
Open the brake and check there is no airgap (3) between the
plate of the armature (7) and the magnet (2). (Note: a small
partial airgap could be normal but if there is airgap in the
whole circumference the brake must be replaced).
Release the brake. Use a gauge for checking the airgap is
above 0,3 mm and below 0,4 mm.
For readjusting the airgap:
o Loosen the safety nuts (5).
o Adjust alternatively the two bolts (6) until the
desired airgap is achieved.
o Tighten the safety nuts.
Repeat the same operation with all the brakes of the
machine (there can be between 2 and 4 brakes)
Brake switches checking and adjustment:
Check there are no KB faults
logged in the Error Log.
Check with leds KB and KB1 on
BCM board that switches change
their state when brake opens and
drops.
Put a 0,05 mm gauge in the airgap
between magnet and armature and
open the brake. The microswitch
must change its state. (It is
recommended to use a multimeter
because it is not always possible
to hear the click).
Put a 0,15 mm gauge in the airgap and open the brake. The microswitch shouldn’t change its state.
For readjusting:
Remove the cover (4 of the airgap checking figure).
With brake dropped, loosen the nut (6) and the bolt (7).
Put a 0,05 mm gauge in the airgap and open the brake. Tighten the bolt until microswitch changes its state.
Replace the gauge by a 0,15 mm one; open the brake and check the microswitch doesn’t change its state.
Tighten the nut.
Repeat the process with the other brakes.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 17/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
SM250 machine:
Brake torque cannot be readjusted. If brake tests fail, replace the brake.
Airgap cannot be adjusted, it can only be checked. The procedure is as follows:
Make the counterweight to rest on its buffer and unfold the
maintenance platform.
Using a gauge, check the airgap between the disk and the
magnet while the brake is dropped. The proper gap is between
0,2 and 0,6 mm.
Measure the airgap in three different points of the
circumference and take the maximum value. If due to wear the
airgap is over 0,6 mm in any of the two magnets, the whole
brake must be replaced.
Brake switches (KB and KB1) checking and adjustment:
Check there are no KB faults logged in the Error
Log.
Check with leds KB and KB1 on BCM board that
switches change their state when brake opens and
drops.
Put a 0,15 mm gauge close to the bolt in the
corresponding airgap. Open the brake and tighten the
adjusting screw until the conmutation point is
reached (it is suggested to use multimeter for
checking the commutation point because the click of
the contact is not always hearable).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 18/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
12. ONE SHOE BRAKING TEST UPWARDS
The purpose of the test is to confirm that braking operation with only one shoe is according with the EN81-1
standard: in this condition, when car is travelling, brake should be able to keep the speed below the nominal
speed. When car is stationary, it should be able to keep it in place.
The procedure for this test depends on the type of machine.
Procedure for PMS230 machine:
Make a car call to the top landing. Check there is nobody in car and put the lift in JRH mode. Unfold the
platform for getting access to the machine.
Block one of the manual rescue levers by inserting the test pin in the holes (1) and (2).
Get out of the hoistway and fold the platform.
Release the brake manually. Check that car doesn’t move.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On).
Using SMLCD, make a car call to the bottom landing.
Using the SMLCD, go to TESTS Acceptance Tests Brake Test (t14). Screen shows “Running”.
Make a car call to the top landing and, as soon as the car reaches the nominal speed, hold the brake
released manually and press STOP (JHM). Emergency stop is performed and SMLCD shows the
deceleration of the car during this stop. Check in SMLCD that speed decreases from nominal speed (or, at
least, that it doesn’t increase). If speed increases, immediately release the lever.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 19/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Warning: Make the test with the car as far as possible from the top landing in order to prevent the
counterweight to hit on its buffers at high speed in case of test failed.
Release the lever, and, if test finished ok, release the Stop button (JHM). Make a car call to the top floor,
put the lift in JRH mode and unfold the platform. Get access to the machine and remove the pin.
Repeat the test with the other brake side.
Once the tests have finished, put the lift back in service (with SMLCD, go to Commands Special trips
KFM Off).
Procedure for PMS420 machine:
Make a car call to the top landing. Check there is nobody in car and put the lift in JRH mode. Unfold the
platform for getting access to the machine.
Block one of the manual rescue levers by inserting the test pin (6) in the holes (7) and (8).
Get out of the hoistway and fold the platform.
Release the brake manually. Check that car doesn’t move.
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Leave the car to open and fully close the doors and then put the lift in KFM mode (with SMLCD, go to
Commands Special trips KFM On).
Using SMLCD, make a car call to the bottom landing.
Using the SMLCD, go to TESTS Acceptance Tests Brake Test (t14). Screen shows “Running”.
Make a car call to the top landing and, as soon as the car reaches the nominal speed, hold the brake
released manually and press STOP (JHM). Emergency stop is performed and SMLCD shows the
deceleration of the car during this stop. It should be at least 150 mm/s2. Check in SMLCD that speed
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 20/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
decreases from nominal speed (or, at least, that it doesn’t increase). If speed increases, immediately
release the lever.
Warning: Make the test with the car as far as possible from the top landing in order to prevent the
counterweight to hit on its buffers at high speed in case of failed test.
Release the lever, and, if test finished ok, release the Stop button (JHM). Make a car call to the top floor,
put the lift in JRH mode and unfold the platform. Get access to the machine and remove the pin.
Repeat the test with the other brake side.
Once the tests have finished, put the lift back in service (with SMLCD, go to Commands Special trips
KFM Off).
Note:
For PMS420 machines with three brake pads, in order to test the
performance of each of the brakes of one side independently, it
will be necessary to detach the brake pad under test from the
manual rescue system. This can be done as follows:
For testing the upper brake: Remove the locking spring (4) and
the pin (6) and link the short connection lever (5) with the long
connection lever (2) with the screws (3).
For testing the lower brake: Remove the locking spring (4) and
the pin (6) from the long connection lever (2) of the lower
brake.
13. VF FAN TEST
This test allows checking the fan of the VF drive is working properly. In SMLCD, go to Tests VF Test
Fan Test (requires Login). During this test, the fan of the VF drive will drive for a few seconds. If it doesn’t
work, replace it (a non-working VF fan could lead to damage the VF drive itself).
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 21/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
14. POSITIONING SYSTEM MAINTENANCE
Positioning system in Miconic MX-GC has a measuring system located on top of the car. There are two
different systems: AGSI, which uses a toothed belt and an absolute encoder and ALSIS which uses a magnetic
tape and a reader.
Toothed Magnetic tape
belt
Encoder
Slider
Reader
AGSI system: absolute rotary encoder moved by a ALSIS system: Magnetic reader and magnetic tape.
toothed belt. Proper tension of the belt has to be Tension of the tape has to be checked. In addition,
checked. Low tension could cause position faults; check the wear of the slider: if the thickness is less
excessive tension could damage the encoder. than 2mm, it should be replaced.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 22/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
C. BASIC CALLBACKS SOLUTION
1. HOW TO CHECK THE SAFETY CHAIN FROM LANDING PANEL
At the top area of the ASIXA board, there is a row with 5 leds (T1, T2, T3A, T3B, T4 and T5). Each of them
shows the status of the safety chain on that checking point.
Before this checking points there is an overcurrent protection included in ASIXA (if this protection is tripped,
red led LUEISK will be lighting; for resetting, press DUEISK-A button).
The voltage of the safety chain is 24Vdc but ASIXA board includes an internal regulator which tries to
compensate voltage drops in the safety chain contacts. The limit of this regulator is 52 Vdc. If this limit is
reached, it is assumed that safety contact is open. So, when using a multimeter for testing the safety chain,
expected measurement results will be 24Vdc if safety chain is closed and 52Vdc if safety chain is opened at any
point.
Note: The following description is generic. It may differ from the one found in some specific jobsites.
Please, use it as a reference only. Before shunt any safety contact, check the wiring diagram of the unit.
T1 RKPH (Phase relay, option); located between SK1.1 and SK1.2 pins of ASIXA board
T2 JHM (stop on ASIXA board) and safety contacts located in pit (governor tension device, stop in pit,
ladder, etc); located between SKS.1 and SKS.2 (except JHM).
T3A Safety contacts in hoistway which are bridged when lift is in ERO mode (limit switches, buffer
switches, overspeed contact on governor); located between SKS.2 and SKS.3.
T3B Safety contacts in car (inspection, stop on top of the car, safety gear); between SKC.1 and SKC.3.
T4 Door lock contacts of the landing doors; located between KTS.1 and KTS.3.
T5 Shunt contacts of landing doors (between KV.1 and KV.2) and car door contact (between SKC.4 and
SKC.5).
All the connectors for testing the safety chain are located in a row on top of the ASIXA board. When using the
tester probes or shunts there is a risk of touching the metal plate of the ASIXA board. So, it is suggested to
cover it with isolating tape (see picture below).
Connectors for safety chain
Isolating tape covering the plate
Leds for the checking points of the safety chain
LUEISK
led and
DUEISK
button
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 23/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
Equivalence of nomenclature for the main safety contacts
OTIS SCHINDLER Description
GTC KSSBV Governor tensioner device
- KLSG Pit ladder
PES JHSG Stop in pit
KNE-U
UDLS Final limit contact
KNE-D
OS KBV Overspeed contact in governor
Buffers KP Buffer
SOS KF Safety gear
TCI JREC Inspection on top of the car
TES JHC Stop on top of the car
ERO JRH Inspection in controller
STOP ERO JHM Stop in controller
DW KV Landing door shunts
DS KTS Landing door locks
GS KTC Car door lock
2. HOW TO RESET A PERMANENT ERROR
When certain faults happen, Miconic MX-GC control system gets blocked in such a way that even if the
problem that caused the fault has been removed, the lift remains out of operation. So, it is necessary to reset the
lift for put it in operation again. There are different reset options depending on which is the subsystem that
caused the problem:
Reset of Travel Control: Removes certain blockages caused by problems in the positioning system (i.e.
positioning sensors).
Procedure: Push Stop (JHM) on ASIX board and put the lift in JRH (ERO) mode. Press simultaneously the Up
(JRH-U) and Down (JRH-D) buttons of JRM (ERO) and, afterwards, release Stop. Switch JRM back to
Normal.
Reset of the Control System: Restarts the control board.
Procedure: Press reset button on GCIOB board (it may take 2-3 minutes to restart the sytem).
Double reset of the Control System: “Deep” reset, clears registers and performs a different restart routine
(it may take some minutes to complete).
Procedure: Press reset button on GCIOB board and, when it beeps, press the button again.
Reset of VF drive: Restarts the VF drive, clearing all the faults related to it which are no longer present.
Procedure: Disconnect main switch (JH) for 5-10 seconds and reconnect it. If by doing this the VF drive is not
recovered, press reset on the VF drive control board and keep it pressed until all the leds of the board turn on.
Then, release the button.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 24/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
3. HOW TO RESET THE LIFT FROM TOP OF THE CAR
In order to prevent the mechanic to be trapped on top of the car due to a fault related to the travel control, it is
possible to reset the control system from top of the car.
Procedure: Lift should be in Inspection mode (JREC switch in JREC position). Push Stop (JHC) on top of the
car and, afterwards, press simultaneously Up direction button (DREC-U) and Down direction button (DREC-
D). Then, release Stop. System should be recovered.
4. HOW TO CHECK THE ERROR LOG
MX-GC control system has an error log which keeps stored the historic of faults of the lift. In order to check it,
there is an option called Error Log in the SMLCD main menu. This log stores the latest 20 faults of the lift and
shows the error code and a short description. For additional information about these codes, check the manual
Schindler Miconic TX and MX-GC. Error codes, available in EMEA FOD website.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 25/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
D. MAIN ADJUSTING PROCEDURES
1. LEARNING RUN
Learning run is needed when replacing the GCIOB board, the positioning encoder (AGSIS or ALSIS), or when
moving any magnet of the positioning system in the hoistway. The procedure is as follows:
Put the lift in installation mode by sliding the JMOF selector to the “1” position. Move the car upwards in
JRH (ERO) mode until it reaches the top landing level (LUET led on ASIX board is lighting).
Log in SMLCD (go to menu Login in SMLCD and key in the password. Default password is ABCD).
Go to Commands Special Trips JLF and activate it by pressing OK and confirming.
Slide the JMOF selector to the “0” position and turn JRH switch to Normal. Learning run begins
automatically and SMLCD shows Learn. The car travels at 0,20 m/s downwards to the bottom floor. Once
this floor is reached, car relevels, learning run is finished and lift is in Normal mode.
Note: During the learning run, the lift will reach the terminal bottom floor
and will slightly overpass it so if the limit switch (KNE-D) is very close to
the landing level safety chain will be opened and learning run will be
aborted. If this is the situation, shunt temporarily the safety chain between
ASIX pins SKS.2 and SKS.3. Once the learning run is finished, remove
the shunt. For this purpose, normally a red labelled connector can be
found in the controller cabinet.
2. ADJUST FLOOR LEVELS
After a learning run it is often necessary to readjust the levelling of car. This can be done with SMLCD, in the
option Commands Adj. Floor Level (requires Log In). See Service Interface With SMLCD. User Manual
for more details.
3. LOADWEIGHING DEVICE CALIBRATION
When loadweighing device LONLMDMS is used, in order to commission it is necessary to perform offset
(Empty Car) and gain (Full load, requires 40 to 100% of load in car) calibration procedures. These procedures
can be done with SMLCD in the option Commands LMS Commission menu. See Service Interface With
SMLCD. User Manual for more details.
4. VF DRIVE REPLACEMENT
When a new VF drive is placed, once all the wiring is done, in order to commission the new drive it is
necessary to perform the following actions:
Double reset the GCIOB board. This transfer the parameters from the GCIOB board to the VF drive.
Perform DC-Link Test T0
Perform Current Loop Test T1
Perform Direction Test (geared machines) or Zero Position Test T3 (gearless machines)
Save changes with Commands Drv. End Commission.
EMEA FIELD SERVICE, SUPPORT TO NOE
OTIS - EMEA NON OTIS FIELD MANUAL Version: 1.0
Date :June-2019
Page : 26/26
LIFT MAINTENANCE BASIC MAINTENANCE TASKS
SCHINDLER Eurolift with MX-GC
BMT
Release 4
5. GCIOB BOARD REPLACEMENT
When a new GCIOB board is placed, it is better, if possible, to keep the same EEPROM (parameters) and the
same FSIMM board (software). If these both components are kept, the lift should work when powered up
without further action.
If any of the components (EEPROM or FSIMM board)
is replaced, a new commisioning of the lift is required.
This means to perform, as minimum, a learning run,
adjust floor levels and lwd commisioning.
In all cases it will be necessary to perform a node tree
update: with SMLCD, go to Commands Freeze Node
Tree.
6. LON NODE REPLACEMENT
After any LON node replacement (LONIC, LONIBV, LONCUS, etc.), it will be necessary to perform a node
tree update: with SMLCD, go to Commands Freeze Node Tree.
EMEA FIELD SERVICE, SUPPORT TO NOE
You might also like
- MX GC Error CodesDocument1,236 pagesMX GC Error CodesRyan84% (32)
- Perform Final Commissioning - KCM 831 Control With KDM Drive, Monospace 500 and 700, Ecosystem MR, and TransysDocument167 pagesPerform Final Commissioning - KCM 831 Control With KDM Drive, Monospace 500 and 700, Ecosystem MR, and TransysRaja Durai100% (2)
- C6-KONE KCE. Training On Wiring DiagramDocument29 pagesC6-KONE KCE. Training On Wiring DiagramElputoAmo XD89% (9)
- 1 - LCE Parameter Manual, EnG (08-2007)Document171 pages1 - LCE Parameter Manual, EnG (08-2007)Karim AhmedNo ratings yet
- Elevator Troubleshooting & Repair: A Technician's Certification Study GuideFrom EverandElevator Troubleshooting & Repair: A Technician's Certification Study GuideRating: 4 out of 5 stars4/5 (9)
- Schindler EuroliftDocument89 pagesSchindler EuroliftMoh Asat Dullah100% (1)
- Schindler 5500/5500S/5400-Rel.02: EN81-1 Commissioning Manual K 40700039 - 12 Edition 02-2016Document96 pagesSchindler 5500/5500S/5400-Rel.02: EN81-1 Commissioning Manual K 40700039 - 12 Edition 02-2016George Pontoni100% (13)
- 1374567D01 - KCE ParametersDocument21 pages1374567D01 - KCE Parameterspaul5791100% (1)
- 5400 ErrorsDocument56 pages5400 Errorsasif mahmood100% (6)
- K 609754 - 09 - SCH 3300 - 5300 - Bionic 5 Et 6 MontageDocument325 pagesK 609754 - 09 - SCH 3300 - 5300 - Bionic 5 Et 6 Montagemoh100% (4)
- Idd Varidoor Learning MaterialDocument35 pagesIdd Varidoor Learning Materialgreno1743% (7)
- Schindler3300 PDFDocument108 pagesSchindler3300 PDFmmmurad100% (7)
- Schindler SMART 002 LED Error CodesDocument9 pagesSchindler SMART 002 LED Error CodesDon Luong100% (1)
- Manual Miconic MX-GC - PDF Versión 1Document100 pagesManual Miconic MX-GC - PDF Versión 1Resendo Did100% (6)
- K 43404896 - 03 - Mise en Service S5500 CO MX07Document120 pagesK 43404896 - 03 - Mise en Service S5500 CO MX07moh100% (2)
- 3100,3300,5300 Information COMMDocument316 pages3100,3300,5300 Information COMMPio Rodolfo100% (3)
- Board Lisa 20 ErrorDocument28 pagesBoard Lisa 20 ErrorYok MulyonoNo ratings yet
- Miconic TX-GC 10-GC Operation SMLCD K604005 - 02Document40 pagesMiconic TX-GC 10-GC Operation SMLCD K604005 - 02Luis Alejandro Sanchez100% (2)
- Schindler Spare Part Price List Y2020 TTDocument29 pagesSchindler Spare Part Price List Y2020 TTmirza farouq100% (2)
- K609711 MM STM PV30 InstallationDocument24 pagesK609711 MM STM PV30 InstallationAli Diab100% (1)
- V3F16L To KDL16 Replacement AS-11.65.037Document40 pagesV3F16L To KDL16 Replacement AS-11.65.037enrique cortes100% (12)
- Monospace 21 SeriesDocument54 pagesMonospace 21 Seriesprasad100% (2)
- Hancock (2010-03) Momentum - A Contrarian Case For Following The HerdDocument13 pagesHancock (2010-03) Momentum - A Contrarian Case For Following The HerddrummondjacobNo ratings yet
- Planetary Geared Machine P420 / 450: Technical CatalogDocument29 pagesPlanetary Geared Machine P420 / 450: Technical CatalogAli DiabNo ratings yet
- Schindler Escalator 9300AE InstallationVDocument23 pagesSchindler Escalator 9300AE InstallationVHùng Vĩ100% (1)
- EJ 41320503 DiagnosticsDocument36 pagesEJ 41320503 DiagnosticsAli Diab100% (1)
- Manual Cadi GCDocument6 pagesManual Cadi GCvanderleynunes50% (2)
- Miconic B Et V Doc OtisDocument45 pagesMiconic B Et V Doc OtisAshraful Shohag100% (5)
- Bionic Menu 20Document35 pagesBionic Menu 20ilya89% (9)
- Motion 4000 Traction v9 42-02-2P25 A6Document480 pagesMotion 4000 Traction v9 42-02-2P25 A6ElputoAmo XDNo ratings yet
- 5500 Call Back Solutions Ae14Document30 pages5500 Call Back Solutions Ae14muchiNo ratings yet
- Schindler MX GC ManualDocument4 pagesSchindler MX GC Manualخالد التريكي0% (8)
- Miconic TX-GC10-GC (Diagnostics)Document69 pagesMiconic TX-GC10-GC (Diagnostics)Ali Diab100% (2)
- EJ 41320502 CO MX CommissioningDocument62 pagesEJ 41320502 CO MX CommissioningAli Diab100% (2)
- CO MX Rel 4 5 6Document57 pagesCO MX Rel 4 5 6Ali Diab50% (2)
- Daig 3300Document126 pagesDaig 3300Osman Elmaradny100% (8)
- Windcrest Autodialler Standard InstructionDocument19 pagesWindcrest Autodialler Standard InstructionaacNo ratings yet
- 3300 AP ReportDocument14 pages3300 AP ReportWiratama PutraNo ratings yet
- Kone Lce 2.1 - Opis Ang.Document5 pagesKone Lce 2.1 - Opis Ang.kędzierzawyNo ratings yet
- Otis 2000 Hyd Rescue PDFDocument12 pagesOtis 2000 Hyd Rescue PDFSatheesh Rama50% (2)
- Schemas 3300 2005 FRDocument60 pagesSchemas 3300 2005 FRElevator Market100% (1)
- Diagnostic UnitDocument119 pagesDiagnostic UnitVương Nguyễn100% (5)
- Equipment Definition: Component LiteratureDocument36 pagesEquipment Definition: Component LiteratureAbbas AkbarNo ratings yet
- IMC - SCR - Rev - E8 (42-02-7200E)Document449 pagesIMC - SCR - Rev - E8 (42-02-7200E)ElputoAmo XDNo ratings yet
- HMC HS - (Asme 2000) - (42 02 1021 - A9)Document174 pagesHMC HS - (Asme 2000) - (42 02 1021 - A9)ElputoAmo XDNo ratings yet
- Lab 4 Am & FM ModulationDocument46 pagesLab 4 Am & FM ModulationMimi Syuryani Binti NodinNo ratings yet
- Project Proposal (Jkuat)Document108 pagesProject Proposal (Jkuat)Florian Osore86% (7)
- Non Otis Field Manual: Basic Maintenance TasksDocument19 pagesNon Otis Field Manual: Basic Maintenance Taskseduardo100% (2)
- Installation and Commissioning: Ac LV 3 (Lobbyvision 3)Document30 pagesInstallation and Commissioning: Ac LV 3 (Lobbyvision 3)Ali DiabNo ratings yet
- Errors SCH-1 PDFDocument946 pagesErrors SCH-1 PDFAshraful ShohagNo ratings yet
- Evacuation Instruction Schindler: EuroliftDocument2 pagesEvacuation Instruction Schindler: EuroliftMartynas Karkauskas100% (1)
- Schindler Brake Maintenance PDFDocument7 pagesSchindler Brake Maintenance PDFSantosh Kumar100% (1)
- Intermittent Problem With Brake Module BCM 4202 For MX-GCDocument1 pageIntermittent Problem With Brake Module BCM 4202 For MX-GChoangson9a100% (1)
- Commodity Owner Manual 2017Document269 pagesCommodity Owner Manual 2017Rene Amrhyn100% (3)
- 4101Document5 pages4101ghosthacker98No ratings yet
- CPIK Frequency Inverter Operating Manual PDFDocument76 pagesCPIK Frequency Inverter Operating Manual PDFpopopo123-1100% (1)
- Introduction To KONE LCE Electrical Schematic Diagram - ENDocument65 pagesIntroduction To KONE LCE Electrical Schematic Diagram - ENStefan100% (8)
- Kone ErrorDocument2 pagesKone Errorrully hidayatullah50% (2)
- Am-11.65.030 Kdl32-Mono InstalDocument82 pagesAm-11.65.030 Kdl32-Mono InstalMike Rushe100% (1)
- Miconic TX-5 Schindler SchematicDocument40 pagesMiconic TX-5 Schindler SchematicLew Kar Keong100% (3)
- Irc Regulation and Control Instructions: Control System Cmc-3 SeriesDocument10 pagesIrc Regulation and Control Instructions: Control System Cmc-3 SeriesAshraful Shohag100% (1)
- Diag SLMCD 1-604454Document33 pagesDiag SLMCD 1-604454alex180777% (13)
- Thyssen-DiagnosticDocument55 pagesThyssen-Diagnosticraymon janszenNo ratings yet
- Button ID CodesDocument6 pagesButton ID Codesyones0% (2)
- BMT Basic Maintenance Tasks For KONE Monospace With KCE TechnologyDocument24 pagesBMT Basic Maintenance Tasks For KONE Monospace With KCE TechnologyMohammad Younus BaigNo ratings yet
- Asterisk and App - RPTDocument7 pagesAsterisk and App - RPTElputoAmo XDNo ratings yet
- 06 ProxmarkDocument27 pages06 ProxmarkElputoAmo XDNo ratings yet
- The MagPi - November 2018Document100 pagesThe MagPi - November 2018ElputoAmo XD100% (1)
- Fujitsu-Siemens Pocket Loox N520, 720 Pinout: 26 Pin Asus Mypal Proprietary ConnectorDocument2 pagesFujitsu-Siemens Pocket Loox N520, 720 Pinout: 26 Pin Asus Mypal Proprietary ConnectorElputoAmo XDNo ratings yet
- TMS 600 RDocument69 pagesTMS 600 RElputoAmo XDNo ratings yet
- Schemi Schindler Miconic LX OleoDocument22 pagesSchemi Schindler Miconic LX OleoElputoAmo XD100% (1)
- Computer Soundcard To Radio InterfaceDocument5 pagesComputer Soundcard To Radio InterfaceElputoAmo XD67% (3)
- FX1N Harware ManualDocument15 pagesFX1N Harware ManualElputoAmo XDNo ratings yet
- Icontrol AC Rel 3 4 42-02-2223 B5Document414 pagesIcontrol AC Rel 3 4 42-02-2223 B5ElputoAmo XDNo ratings yet
- Icontrol DC Aug 08 Rel 42-02-7222 B7Document788 pagesIcontrol DC Aug 08 Rel 42-02-7222 B7ElputoAmo XDNo ratings yet
- Motion 2000 Hydraulic v8 42-02-1P20 B7Document248 pagesMotion 2000 Hydraulic v8 42-02-1P20 B7ElputoAmo XD100% (1)
- VFMC-PTC Series M 42-02-2p22 Rev b9Document367 pagesVFMC-PTC Series M 42-02-2p22 Rev b9ElputoAmo XDNo ratings yet
- Motion 2000 Hydraulic V9 42-02-1P21 A9Document294 pagesMotion 2000 Hydraulic V9 42-02-1P21 A9ElputoAmo XDNo ratings yet
- IMC Performa ASME 2000 42-02-7205 Rev B3Document470 pagesIMC Performa ASME 2000 42-02-7205 Rev B3ElputoAmo XDNo ratings yet
- 42-02-G004 B4 Motion GroupDocument86 pages42-02-G004 B4 Motion GroupElputoAmo XDNo ratings yet
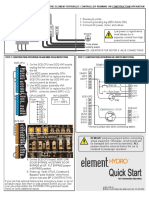
- 42-QR-1P26 B3 Element Hydro Quick StartDocument1 page42-QR-1P26 B3 Element Hydro Quick StartElputoAmo XDNo ratings yet
- 42-95-0004 C6 IntellaNetDocument318 pages42-95-0004 C6 IntellaNetElputoAmo XDNo ratings yet
- Tricon 42-02-2T00 F4Document301 pagesTricon 42-02-2T00 F4ElputoAmo XD0% (1)
- IMC-MG (42-02-6202 Rev B3)Document332 pagesIMC-MG (42-02-6202 Rev B3)ElputoAmo XDNo ratings yet
- Lesson 22 ECG TracesDocument13 pagesLesson 22 ECG TracesGemma WrigleyNo ratings yet
- Bearing LayoutDocument30 pagesBearing LayoutmayasfaresNo ratings yet
- LM10b XSLT To Code ExecutionDocument10 pagesLM10b XSLT To Code ExecutionSaw GyiNo ratings yet
- Agile DeckDocument42 pagesAgile Deckketantank09100% (1)
- Asst5 F21Document2 pagesAsst5 F21BerkNo ratings yet
- Kangen Enagic Water Brochure OCT 2021Document12 pagesKangen Enagic Water Brochure OCT 2021Karan RawatNo ratings yet
- Cover Letter Resume - Brandon Persaud 1Document4 pagesCover Letter Resume - Brandon Persaud 1api-357423438No ratings yet
- Medi-Gas Check Full Range CatalogueDocument20 pagesMedi-Gas Check Full Range CatalogueShamshad HussainNo ratings yet
- Factor Effecting RecruitmentDocument4 pagesFactor Effecting RecruitmentsogatNo ratings yet
- Areeba Hussain Ahmed: UmmaryDocument1 pageAreeba Hussain Ahmed: UmmaryAreeba Hussain AhmedNo ratings yet
- JD DM PurchasingDocument1 pageJD DM PurchasingSachin RatheeNo ratings yet
- Checkliste - Leistungstabelle R44 Raven IIDocument2 pagesCheckliste - Leistungstabelle R44 Raven IIAfonso Henrique Rodrigues LonghiNo ratings yet
- Guided Exercise - Mendel's Peas: NameDocument9 pagesGuided Exercise - Mendel's Peas: NameStephanie Jane AndoyNo ratings yet
- Vaccination RecordDocument47 pagesVaccination RecordJolleah AujeroNo ratings yet
- K DLP Week 22 Day 3 CarinaDocument6 pagesK DLP Week 22 Day 3 Carinacarina pelaezNo ratings yet
- Cosmology GitaDocument122 pagesCosmology GitabaijumohanNo ratings yet
- Syllabus in Pec 106Document6 pagesSyllabus in Pec 106Clarisse MacalintalNo ratings yet
- I. Personal Data Name: Age: Address: Contact No.: Name of ParentsDocument5 pagesI. Personal Data Name: Age: Address: Contact No.: Name of ParentsJohn MendozaNo ratings yet
- Digital India Has Made Significant Strides in Promoting Financial Inclusion by Leveraging Digital Technologies and InitiativesDocument2 pagesDigital India Has Made Significant Strides in Promoting Financial Inclusion by Leveraging Digital Technologies and InitiativesTanuj SinghNo ratings yet
- Phy110 Lab Report 1Document1 pagePhy110 Lab Report 1Khalila KhalishaNo ratings yet
- Test Bank For Stuttering Foundations and Clinical Applications 0131573101Document24 pagesTest Bank For Stuttering Foundations and Clinical Applications 0131573101JimmyHaynessfmg100% (46)
- BLM Physics II Um 2021Document78 pagesBLM Physics II Um 2021Tanmayi KartikNo ratings yet
- 2018 Spring 195B Group 1 Project Report UniRideDocument89 pages2018 Spring 195B Group 1 Project Report UniRideSanjog ChoudharyNo ratings yet
- Mathematics Resource Package: Quarter 2Document7 pagesMathematics Resource Package: Quarter 2Lourdes de JesusNo ratings yet
- Asus Amd: Stok & Harga Dapat Berubah Sewaktu Waktu, Informasi Stok & Harga Via Online Chat WA 082225625757Document5 pagesAsus Amd: Stok & Harga Dapat Berubah Sewaktu Waktu, Informasi Stok & Harga Via Online Chat WA 082225625757Alfasy BrothersNo ratings yet
- Vessel ItpDocument3 pagesVessel ItpVineet KhanduriNo ratings yet
- Lista CartiDocument33 pagesLista CartiCris Ti67% (3)