Download as docx, pdf, or txt
You might also like
- Bar-On TestDocument6 pagesBar-On TestLuis GonMor75% (4)
- THC 2 Risk ManagementDocument8 pagesTHC 2 Risk ManagementSheena HarrienNo ratings yet
- WWI Document-Based Question (TEACHER ANSWER KEY)Document6 pagesWWI Document-Based Question (TEACHER ANSWER KEY)Macky GonzalesNo ratings yet
- A Minor Project Report Submitted To Rajiv Gandhi Prodhyogik Vishwavidyalaya, Bhopal Towards Partial Fulfillment For The Award of The Degree ofDocument53 pagesA Minor Project Report Submitted To Rajiv Gandhi Prodhyogik Vishwavidyalaya, Bhopal Towards Partial Fulfillment For The Award of The Degree ofwahidjaanNo ratings yet
- Final Project Report of LabDocument7 pagesFinal Project Report of LabDuniya ANo ratings yet
- Pragati Engineering College: Bachelor of Technology IN Electronics and Communication EngineeringDocument24 pagesPragati Engineering College: Bachelor of Technology IN Electronics and Communication EngineeringSunny SuryatejaNo ratings yet
- Automatic Toll CollectionDocument27 pagesAutomatic Toll CollectionRakibul HassanNo ratings yet
- DC Motor CTRL Using Single SwitchDocument44 pagesDC Motor CTRL Using Single SwitchAbhijeet NayakNo ratings yet
- Final Mini Project ReportDocument29 pagesFinal Mini Project ReportumaNo ratings yet
- Solar Refrigerator SystemDocument19 pagesSolar Refrigerator SystemManish SinghNo ratings yet
- Arduino Solar TrackerDocument46 pagesArduino Solar TrackerPhops Freal100% (1)
- Land Mine Detection Robot Using BLE-3.0 Voice Controlled, Using Joystick and Gyroscopic SensorDocument6 pagesLand Mine Detection Robot Using BLE-3.0 Voice Controlled, Using Joystick and Gyroscopic SensorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ashwini Project Report FinalDocument63 pagesAshwini Project Report FinalNikhil GawandeNo ratings yet
- Automatic Ration Distribution by Using Raspberry PiDocument5 pagesAutomatic Ration Distribution by Using Raspberry PiIJIRSTNo ratings yet
- Wifi Based Digital Notice BoardDocument63 pagesWifi Based Digital Notice BoardANSARI WASIM MOIN ANSARI WASIM MOINNo ratings yet
- Smart Solar Grass Cutter RobotDocument3 pagesSmart Solar Grass Cutter RobotEditor IJTSRDNo ratings yet
- Street Light Automation Using IoTDocument43 pagesStreet Light Automation Using IoTAshwin100% (1)
- PDF - Next Step Home Automatio Final Paper 150919Document6 pagesPDF - Next Step Home Automatio Final Paper 150919Dr. Pinki Yadav YadavNo ratings yet
- DEM Microproject EE 4IDocument10 pagesDEM Microproject EE 4IAvinash GajbhiyeNo ratings yet
- Original Project WorkDocument65 pagesOriginal Project WorkKonda PrashanthNo ratings yet
- Arduino Based Sun Tracking Solar Panel: Gogulamudi Srikanth Reddy (18Vf1M3323) Gandu Naga Sai Tejaswi (18Vf1M3319)Document39 pagesArduino Based Sun Tracking Solar Panel: Gogulamudi Srikanth Reddy (18Vf1M3323) Gandu Naga Sai Tejaswi (18Vf1M3319)Sujit reddyNo ratings yet
- Iot ReportDocument56 pagesIot ReportuditNo ratings yet
- Report On Microcontroller Based Anesthesia InjectorDocument15 pagesReport On Microcontroller Based Anesthesia Injectornagalakshmi_reddy100% (1)
- Underground Cable Fault Detection Using ZigbeeDocument36 pagesUnderground Cable Fault Detection Using ZigbeeRana AbrarNo ratings yet
- Iot Based Patient Health Monitoring System: A Project ReportDocument52 pagesIot Based Patient Health Monitoring System: A Project Reportरोहित यदुवंशीNo ratings yet
- Auto Intensity Control of Street LightDocument53 pagesAuto Intensity Control of Street LightNikhith ReddyNo ratings yet
- Project Report FinalDocument60 pagesProject Report Finalaisha singhNo ratings yet
- New Report 274 (AutoRecovered)Document44 pagesNew Report 274 (AutoRecovered)SriramNo ratings yet
- Major Project PraveenDocument33 pagesMajor Project PraveenPraveen dewalNo ratings yet
- Project Covid 19Document24 pagesProject Covid 19Bilal BhatNo ratings yet
- On "GSM BASED E-NOTICE BOARD"Document28 pagesOn "GSM BASED E-NOTICE BOARD"Rahul Garg75% (4)
- Automatic Street Light ControlDocument41 pagesAutomatic Street Light ControlP.r. Suvankar67% (3)
- Android Gesture Controlled Robot: Mini Project OnDocument18 pagesAndroid Gesture Controlled Robot: Mini Project OnRaghu RåjNo ratings yet
- Automatic Street Light Control Using LDRDocument14 pagesAutomatic Street Light Control Using LDRpubg mobileNo ratings yet
- Power Failure Final ReportDocument26 pagesPower Failure Final ReportJayshree ReddyNo ratings yet
- Mini Project Report MONIKADocument24 pagesMini Project Report MONIKAu creatorNo ratings yet
- Underwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureDocument19 pagesUnderwater Communication Using LI-FI Technology: Names of The Students 2. Aviraj Shejawal 3. Dharyashil WaghchaureSudarshan RautNo ratings yet
- Intelligent Lighting System For Railway PlatformsDocument3 pagesIntelligent Lighting System For Railway PlatformsMahesh MahiNo ratings yet
- Smart Irrigation System Using Soil Moisture Sensor: Submitted ToDocument11 pagesSmart Irrigation System Using Soil Moisture Sensor: Submitted ToAlone Walker100% (1)
- Design and Construction of LED Matrix DisplayDocument7 pagesDesign and Construction of LED Matrix DisplayTseren TsekuNo ratings yet
- MICROCONTROLLER BASED AUTOMETIC FIRE CONTROL & MONITORING SYSTEM - PDF P04194Document60 pagesMICROCONTROLLER BASED AUTOMETIC FIRE CONTROL & MONITORING SYSTEM - PDF P04194jopareshNo ratings yet
- Thesis PDFDocument50 pagesThesis PDFabdulsemedNo ratings yet
- Chapter One: Introduction 1.1 Background of The StudyDocument30 pagesChapter One: Introduction 1.1 Background of The StudyUzoma FrancisNo ratings yet
- Embedded Real Time SystemDocument12 pagesEmbedded Real Time SystemKottai eswariNo ratings yet
- Laser SecurityDocument2 pagesLaser SecurityErole Technologies Pvt ltd Homemade EngineerNo ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Aurdino Voting MachineDocument70 pagesAurdino Voting MachinepavithraNo ratings yet
- 048.wireless Water Level ControllerDocument3 pages048.wireless Water Level Controllerpwdsaravanan50% (2)
- Mini Project Anti Sleep Alarm Report..Document14 pagesMini Project Anti Sleep Alarm Report..Jai chiNo ratings yet
- Password Based Circuit BreakerDocument8 pagesPassword Based Circuit BreakerRakshitha kNo ratings yet
- A Study of Feasibility of Atmospheric Water Generator: Chhattisgarh Swami Vivekanand Technical University, Bhilai (INDIA)Document41 pagesA Study of Feasibility of Atmospheric Water Generator: Chhattisgarh Swami Vivekanand Technical University, Bhilai (INDIA)Shriya100% (1)
- Electric ReportDocument33 pagesElectric ReportAkshay bypNo ratings yet
- Iot Based Solar Power Monitoring System Using Esp8266Document2 pagesIot Based Solar Power Monitoring System Using Esp8266mariyappanNo ratings yet
- Wireless Notice-Board Using Node MCUDocument4 pagesWireless Notice-Board Using Node MCURahul SharmaNo ratings yet
- Alcohol Detection System in CarsDocument12 pagesAlcohol Detection System in CarsRat.T67% (3)
- Analysis and Classification of Milk Qualityusingelectronicsensoryorgans-Mba-2017Document91 pagesAnalysis and Classification of Milk Qualityusingelectronicsensoryorgans-Mba-2017ziza20 ZizaNo ratings yet
- Solar Powered Rover and Obstacle DetectorDocument22 pagesSolar Powered Rover and Obstacle DetectorAnjna SinhaNo ratings yet
- Smart Monitoring of The Train and Train Tracks To Prevent Railway HazardsDocument25 pagesSmart Monitoring of The Train and Train Tracks To Prevent Railway HazardsviswaNo ratings yet
- Micro Controller Based Digital Visitor CounterDocument33 pagesMicro Controller Based Digital Visitor Counterprathameshas90No ratings yet
- MajorProject (Batch1)Document65 pagesMajorProject (Batch1)tejNo ratings yet
- b13 Forced Commutation Using ArduinoDocument62 pagesb13 Forced Commutation Using ArduinoAlexandru Stefan AndriesNo ratings yet
- Visvesvaraya Technological University: Jnana Sangama, Belagavi-590018Document18 pagesVisvesvaraya Technological University: Jnana Sangama, Belagavi-590018UMESH BNo ratings yet
- The Deeper Work of Executive Development: Outgrowing SensitivitiesDocument5 pagesThe Deeper Work of Executive Development: Outgrowing SensitivitiesGunjanNo ratings yet
- VGC, Summer Internship 2018Document99 pagesVGC, Summer Internship 2018Aashi Sharma100% (1)
- ISC2 Certification Prep Kit Global PDFDocument13 pagesISC2 Certification Prep Kit Global PDFNaveen Niraj100% (1)
- Project REAP ProposalDocument6 pagesProject REAP ProposalRoxanne Cabilin100% (5)
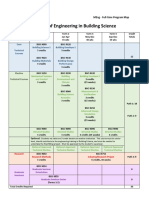
- Master of Engineering in Building ScienceDocument1 pageMaster of Engineering in Building ScienceĐăng KhoaNo ratings yet
- Project Proposal: Barangay-Based Supplementary FeedingDocument5 pagesProject Proposal: Barangay-Based Supplementary FeedingMylene Rosales100% (1)
- Gas 1 and 2 / Oral CommunicationDocument7 pagesGas 1 and 2 / Oral CommunicationRON D.C.No ratings yet
- The Role of GladiatorsDocument1 pageThe Role of GladiatorsNia NiaNo ratings yet
- Shipping Operation Diagram: 120' (EVERY 30')Document10 pagesShipping Operation Diagram: 120' (EVERY 30')Hafid AriNo ratings yet
- Managing The Quality of Consulting EngagementDocument3 pagesManaging The Quality of Consulting EngagementFlor Danielle QuerubinNo ratings yet
- Daily Report Android App: Project SynopsisDocument13 pagesDaily Report Android App: Project SynopsisAyush jainNo ratings yet
- Rendre Compte de Son Stage en AnglaisDocument5 pagesRendre Compte de Son Stage en AnglaisTitouan BltNo ratings yet
- Republic of The Philippines Department of Labor and EmploymentDocument5 pagesRepublic of The Philippines Department of Labor and Employmentrenz naluminNo ratings yet
- CH - 5 - MCQsDocument4 pagesCH - 5 - MCQsSarthak BhagatNo ratings yet
- Ditsela CEET2014Document11 pagesDitsela CEET2014Jeofrey DitselaNo ratings yet
- Part G-13 People Vs MendezDocument3 pagesPart G-13 People Vs MendezCyruz TuppalNo ratings yet
- l1 A Music Technology 501 1133 4 Qual Spec Issue 4 PDFDocument64 pagesl1 A Music Technology 501 1133 4 Qual Spec Issue 4 PDFJames TaylorNo ratings yet
- Big Dakka For Hire WD38 PDFDocument6 pagesBig Dakka For Hire WD38 PDFIvan Lubianko100% (2)
- Carper Lad Form No 68 Writ of InstallationDocument2 pagesCarper Lad Form No 68 Writ of InstallationAngelique Kamille PeñaflorNo ratings yet
- Compare & Contrast: Task CardsDocument9 pagesCompare & Contrast: Task CardsSamantha AndreNo ratings yet
- What Is Multicultural Education (Exp)Document4 pagesWhat Is Multicultural Education (Exp)Eldrian Louie ManuyagNo ratings yet
- Cs507 Quiz Solved #2Document18 pagesCs507 Quiz Solved #2Power GirlsNo ratings yet
- Church Music - The Pastoral OrganistDocument9 pagesChurch Music - The Pastoral OrganistDennis50% (10)
- The Prince by Niccolo' MachiavelliDocument20 pagesThe Prince by Niccolo' MachiavelliWilbert Carlo RachoNo ratings yet
- PPT Ch01Document49 pagesPPT Ch01Ryxn xxNo ratings yet
- AssertivenessDocument9 pagesAssertivenessdaariyakhalidNo ratings yet
- The Weekends Are A Time For Families in BritainDocument3 pagesThe Weekends Are A Time For Families in BritainShabir Muhammad DinnaykhanNo ratings yet