Download as pdf or txt
You might also like
- LEED GA Exam Questions Set 3Document24 pagesLEED GA Exam Questions Set 3CEG BangladeshNo ratings yet
- Assignment 3 Mode Choice ModelsDocument4 pagesAssignment 3 Mode Choice ModelsSesay Alieu100% (2)
- Evin PersonalityTrait2022Document8 pagesEvin PersonalityTrait2022Evin MorganeNo ratings yet
- Applied Ergonomics: J. Liebregts, M. Sonne, J.R. PotvinDocument8 pagesApplied Ergonomics: J. Liebregts, M. Sonne, J.R. PotvinHasan Hüseyin TokgözNo ratings yet
- Consciousness and Cognition: Jonas Gouraud, Arnaud Delorme, Bruno Berberian TDocument11 pagesConsciousness and Cognition: Jonas Gouraud, Arnaud Delorme, Bruno Berberian TDamián SáezNo ratings yet
- Yasobantetal - DriverErgonomicsDocument6 pagesYasobantetal - DriverErgonomicsAkbarNo ratings yet
- The Manchester Driver Behaviour Questionnaire As A Predictor of Road Traffic AccidentsDocument46 pagesThe Manchester Driver Behaviour Questionnaire As A Predictor of Road Traffic AccidentsAseel AbdulrhmanNo ratings yet
- Transportation Research Interdisciplinary Perspectives: Md. Ebrahim ShaikDocument9 pagesTransportation Research Interdisciplinary Perspectives: Md. Ebrahim ShaikSangeetha NNo ratings yet
- Ferreira ACE-R Accident Analysis 12Document10 pagesFerreira ACE-R Accident Analysis 12Ana VanessaNo ratings yet
- Journal of Safety Research: Sheila T.D. Cordazzo, Charles T. Scialfa, Katherine Bubric, Rachel Jones RossDocument9 pagesJournal of Safety Research: Sheila T.D. Cordazzo, Charles T. Scialfa, Katherine Bubric, Rachel Jones RossGirmaNo ratings yet
- Art Meta AnalisisDocument20 pagesArt Meta AnalisisdylanNo ratings yet
- Visual and Cognitive Predictors of Driving SafetyDocument11 pagesVisual and Cognitive Predictors of Driving SafetyNelly LeónNo ratings yet
- Reading 1 Human Factors in Driving Oppenheim and David ShinarDocument19 pagesReading 1 Human Factors in Driving Oppenheim and David Shinarsemihaomur87No ratings yet
- Detection and Prediction of Driver Drowsiness Using Artificial Neural NetworkDocument10 pagesDetection and Prediction of Driver Drowsiness Using Artificial Neural Networkshilps1234abcNo ratings yet
- Strayer 2015 PDFDocument25 pagesStrayer 2015 PDFvlopezNo ratings yet
- Driver Performance Evaluation ConsideratDocument10 pagesDriver Performance Evaluation Consideratprofeta1955No ratings yet
- Bicycle 63Document9 pagesBicycle 63abhimanyu2923No ratings yet
- Sustainability 13 04775Document17 pagesSustainability 13 04775Twaine SalvañaNo ratings yet
- NIH Public Access: Visual and Cognitive Predictors of Driving Safety in Parkinson's Disease PatientsDocument16 pagesNIH Public Access: Visual and Cognitive Predictors of Driving Safety in Parkinson's Disease PatientsSara GRNo ratings yet
- Journal of Safety Research: Charles C. Liu, Simon G. Hosking, Michael G. LennéDocument7 pagesJournal of Safety Research: Charles C. Liu, Simon G. Hosking, Michael G. Lennémariah.hafeez4474No ratings yet
- 2084-Article Text-5594-1-10-20220804Document8 pages2084-Article Text-5594-1-10-20220804muhammad ariefNo ratings yet
- Validation of A Light EEG-Based Measure For Real-Time Stress Monitoring During Realistic DrivingDocument20 pagesValidation of A Light EEG-Based Measure For Real-Time Stress Monitoring During Realistic DrivingFabio BabiloniNo ratings yet
- A Survey On Proactive Accident Avoidance System Using IOTDocument6 pagesA Survey On Proactive Accident Avoidance System Using IOTVidya ViduNo ratings yet
- Munduteguy Ragot Court 2011 A Contribution To Situation Awareness Analysis Understanding How Mismatched ExpectationsDocument16 pagesMunduteguy Ragot Court 2011 A Contribution To Situation Awareness Analysis Understanding How Mismatched ExpectationsMaravilhaNo ratings yet
- Art 6Document9 pagesArt 6Zulma TenaNo ratings yet
- Sustainability DevelopmentDocument12 pagesSustainability DevelopmentVishal MehtaNo ratings yet
- Sustainability 12 01971Document12 pagesSustainability 12 01971Vishal MehtaNo ratings yet
- Transportation Research Part F: José Luis Machado-León, Juan de Oña, Rocío de Oña, Laura Eboli, Gabriella MazzullaDocument11 pagesTransportation Research Part F: José Luis Machado-León, Juan de Oña, Rocío de Oña, Laura Eboli, Gabriella MazzullaPetre Elena MadalinaNo ratings yet
- Kaber 2016Document18 pagesKaber 2016Andreea FlorentinaNo ratings yet
- Sombreno - Bongolto Chapter 1Document7 pagesSombreno - Bongolto Chapter 1Cadet Jerald BongoltoNo ratings yet
- What 'S Missing in Autism Spectrum Disorder Motor Assessments?Document13 pagesWhat 'S Missing in Autism Spectrum Disorder Motor Assessments?MárciaValenteValenteNo ratings yet
- Zaabta Sirine Hadje 126Document13 pagesZaabta Sirine Hadje 126khadidja BOUMEGOUASNo ratings yet
- Anti Glare2Document8 pagesAnti Glare2PANKIT PATELNo ratings yet
- Ports PrelimsDocument7 pagesPorts PrelimsJericho SulaNo ratings yet
- Crossing Roads Safely An Experimental Study of Age Differences in Gap Selection by PedstriansDocument10 pagesCrossing Roads Safely An Experimental Study of Age Differences in Gap Selection by PedstriansCyber Hunter GamersNo ratings yet
- Wijnands2020 Article Real-timeMonitoringOfDriverDroDocument13 pagesWijnands2020 Article Real-timeMonitoringOfDriverDrosas28No ratings yet
- Behind The Wheel: Exploring Gray Matter Variations in Experienced DriversDocument17 pagesBehind The Wheel: Exploring Gray Matter Variations in Experienced DriversDiego RMNo ratings yet
- Mosier & Fischer-2010-Ch6 - Judgment & Decision Making by Individuls & Teams - Issues, Models & ApplicationsDocument62 pagesMosier & Fischer-2010-Ch6 - Judgment & Decision Making by Individuls & Teams - Issues, Models & ApplicationsBahrouniNo ratings yet
- 1 s2.0 S1877042814024690 MainDocument6 pages1 s2.0 S1877042814024690 Maindado93No ratings yet
- Sensors 23 01292 v2Document19 pagesSensors 23 01292 v2Todor GrubisicNo ratings yet
- Driver Visual BehaviorDocument11 pagesDriver Visual Behaviormfbs8689 awesomeNo ratings yet
- Fuzzy-Logic-Based Walking Context Analysis For Visually Impaired NavigationDocument20 pagesFuzzy-Logic-Based Walking Context Analysis For Visually Impaired NavigationFranz Bao-asNo ratings yet
- Kalia CA 6 4Document7 pagesKalia CA 6 4Sonal KaliaNo ratings yet
- Predisposing-Personal Factors Associated With Passengersafety and Safe Ridingbehaviors Among Cyclists (Boda Boda Riders) in KampalaDocument10 pagesPredisposing-Personal Factors Associated With Passengersafety and Safe Ridingbehaviors Among Cyclists (Boda Boda Riders) in KampalaIJAR JOURNALNo ratings yet
- Detection of Gender and Age Using Machine LearningDocument8 pagesDetection of Gender and Age Using Machine LearningIJRASETPublicationsNo ratings yet
- Factors Affecting TransportationDocument8 pagesFactors Affecting TransportationBiniNo ratings yet
- Traffic Locus of Control, Driving Skills, and Attitudes Towards In-Vehicle Technologies (Isa & Acc)Document10 pagesTraffic Locus of Control, Driving Skills, and Attitudes Towards In-Vehicle Technologies (Isa & Acc)Abby FaizNo ratings yet
- Montes Et Al. - Selective Attention...Document20 pagesMontes Et Al. - Selective Attention...SrdjanNo ratings yet
- 50 - Choudhari2019Document11 pages50 - Choudhari2019alison.pereiraNo ratings yet
- Bridging The Gap Between Research and Practice: A Continuing ChallengeDocument3 pagesBridging The Gap Between Research and Practice: A Continuing Challengeasmita sainiNo ratings yet
- Transportation Research Part F: Tamar Ben-Bassat, David ShinarDocument11 pagesTransportation Research Part F: Tamar Ben-Bassat, David ShinarFabricioNo ratings yet
- Autistic Features in Relation To Motor Function and QualityDocument8 pagesAutistic Features in Relation To Motor Function and Qualityarief aceNo ratings yet
- Classify Driver Behavior Using Shallow and Deep-Learning MethodsDocument3 pagesClassify Driver Behavior Using Shallow and Deep-Learning MethodsvarunNo ratings yet
- Measuring Cognitive Distractions FINALDocument53 pagesMeasuring Cognitive Distractions FINALmcanham4472No ratings yet
- Pedestrian Safety Perception and Crossing Behaviors in Narrow UrbanDocument12 pagesPedestrian Safety Perception and Crossing Behaviors in Narrow UrbanStephanie MadridNo ratings yet
- Exploring Monitoring Systems Data For Driver Distraction and Drowsiness ResearchDocument14 pagesExploring Monitoring Systems Data For Driver Distraction and Drowsiness Researchotik brebesNo ratings yet
- SOKRATIS Driving Thessaloniki Alzheimer 2019 - 2Document51 pagesSOKRATIS Driving Thessaloniki Alzheimer 2019 - 2Sokratis PapageorgiouNo ratings yet
- Iverson - 10 - Dementia and Driving ConsensusDocument11 pagesIverson - 10 - Dementia and Driving Consensusmadalena limaNo ratings yet
- Association Between Ergonomics Risk Factors and RULA Scores Among The Students of Rajshahi University of Engineering & TechnologyDocument8 pagesAssociation Between Ergonomics Risk Factors and RULA Scores Among The Students of Rajshahi University of Engineering & TechnologyS M Ataul KarimNo ratings yet
- Traffic Mortality, Mortality Awareness, and Attitude To Road SafetyDocument5 pagesTraffic Mortality, Mortality Awareness, and Attitude To Road SafetyIJAR JOURNALNo ratings yet
- M SHELDocument5 pagesM SHELErwin Paulian SihombingNo ratings yet
- Vision Screening of Older Drivers For PRDocument16 pagesVision Screening of Older Drivers For PRprofeta1955No ratings yet
- Driver Performance Evaluation ConsideratDocument10 pagesDriver Performance Evaluation Consideratprofeta1955No ratings yet
- Detection of Microsleep Events Data ReduDocument8 pagesDetection of Microsleep Events Data Reduprofeta1955No ratings yet
- The Effect of Cognitive Impairment On OlDocument63 pagesThe Effect of Cognitive Impairment On Olprofeta1955No ratings yet
- Reorienting Attention and Inhibition ofDocument14 pagesReorienting Attention and Inhibition ofprofeta1955No ratings yet
- Effects of Major Road Vehicle Speed andDocument11 pagesEffects of Major Road Vehicle Speed andprofeta1955No ratings yet
- Gap Acceptance Intersection Approach SpeDocument17 pagesGap Acceptance Intersection Approach Speprofeta1955No ratings yet
- A Left Turn Driving Aid Using ProjectedDocument8 pagesA Left Turn Driving Aid Using Projectedprofeta1955No ratings yet
- Effect of Road Lighting On Night DrivingDocument61 pagesEffect of Road Lighting On Night Drivingprofeta1955No ratings yet
- Adaptive Vehicle Lighting Visual PerformDocument84 pagesAdaptive Vehicle Lighting Visual Performprofeta1955No ratings yet
- White Fork Lift MSB Series Parts CatalogDocument9 pagesWhite Fork Lift MSB Series Parts Catalogalan100% (58)
- Kenworth t880Document36 pagesKenworth t880Himanshu SinghNo ratings yet
- Manu New Theory AnswerDocument224 pagesManu New Theory Answerabujaid azmiNo ratings yet
- Abu Dhabi Capital Development CodeDocument186 pagesAbu Dhabi Capital Development Codefrikha mohamedNo ratings yet
- Imageability 1Document21 pagesImageability 1Adrish NaskarNo ratings yet
- Đề kiểm tra Tiếng Anh 9 - TEST 5 AdvanceDocument5 pagesĐề kiểm tra Tiếng Anh 9 - TEST 5 AdvanceLE THI CAM TUNo ratings yet
- Empire Vent Free SR10, SR18, SR30 BF10, BF20, BF30Document25 pagesEmpire Vent Free SR10, SR18, SR30 BF10, BF20, BF30NorthernPropaneNo ratings yet
- Al-Amana Technology Factory For Electrical Industries: GeneralmanagerDocument1 pageAl-Amana Technology Factory For Electrical Industries: Generalmanagerbasem MagdyNo ratings yet
- S-9.8 How To Develop Traceability SystemsDocument9 pagesS-9.8 How To Develop Traceability SystemsLinda Setya WatiNo ratings yet
- Alfa Romeo Giulia Brakes SpecificationDocument2 pagesAlfa Romeo Giulia Brakes SpecificationMilanRNo ratings yet
- Look - Out & HelmsmanDocument7 pagesLook - Out & Helmsmanjoeven64100% (1)
- Risk Assessment For General ActivitiesDocument25 pagesRisk Assessment For General Activitiesabou bakar67% (3)
- NAM AIDC ICD Ver D 20 Jan 2012Document64 pagesNAM AIDC ICD Ver D 20 Jan 2012luifuentesNo ratings yet
- Tradewp4inf.117 Corr.1 en PDFDocument14 pagesTradewp4inf.117 Corr.1 en PDFPrakshi AggarwalNo ratings yet
- Dynamic Bus Charger: Presentation For Btech Project (Review 1)Document23 pagesDynamic Bus Charger: Presentation For Btech Project (Review 1)Sandesh MahajanNo ratings yet
- Dissertation (Mihir) FinalDocument51 pagesDissertation (Mihir) FinalPratik BasakNo ratings yet
- Aerostar Maintenance Manual ATA-91-Charts and Wiring DiagramsDocument145 pagesAerostar Maintenance Manual ATA-91-Charts and Wiring DiagramsNsafetyalwaysoffNo ratings yet
- Thicker Than Water - Chapter 1 - OnPointDocument3 pagesThicker Than Water - Chapter 1 - OnPointOnPointRadioNo ratings yet
- JHON FREDDY MARBUN (Resume) - 1Document2 pagesJHON FREDDY MARBUN (Resume) - 1jhonfreddymarbunNo ratings yet
- Pai Catalog Sheet 1083Document5 pagesPai Catalog Sheet 1083Juan Carlos Sivira ArevaloNo ratings yet
- US Petcoke August 2022Document12 pagesUS Petcoke August 2022Dreadnought KZNo ratings yet
- Market Strategy: February 2021Document19 pagesMarket Strategy: February 2021Harshvardhan SurekaNo ratings yet
- Ili Department of Public Works and Highways: - 097 13'Dpwh 10 20 202Fj.Document2 pagesIli Department of Public Works and Highways: - 097 13'Dpwh 10 20 202Fj.Dyeri FloresNo ratings yet
- Csónak TervDocument18 pagesCsónak TervÁrpád SkorkaNo ratings yet
- Antilock Brake System - Insignia 13-17Document114 pagesAntilock Brake System - Insignia 13-17Muhammed DoumaNo ratings yet
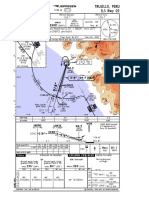
- Trujillo Ils Rwy 02Document1 pageTrujillo Ils Rwy 02Mateo CardenasNo ratings yet
- Dhaka MallDocument34 pagesDhaka Mallshuddoh lynNo ratings yet
- Bravo Technical ReportDocument299 pagesBravo Technical ReportNathaniel PohNo ratings yet