Download as pdf or txt
You might also like
- COMP10001 MST SummaryDocument6 pagesCOMP10001 MST SummaryBenjamin AryaNo ratings yet
- Python - MCQ-II With Answers and Chapter SummariesDocument62 pagesPython - MCQ-II With Answers and Chapter SummariesMargaritha ThomasNo ratings yet
- U5l07 Activityguide WillitcrashDocument5 pagesU5l07 Activityguide Willitcrashapi-332412793100% (2)
- Practo PresentationDocument5 pagesPracto PresentationAditya TiwariNo ratings yet
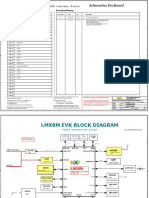
- Schematics Devboard: (I.Mx8M Customer Board)Document23 pagesSchematics Devboard: (I.Mx8M Customer Board)hdsetanhdsetaNo ratings yet
- PCS-9691 - X - Instruction Manual - EN - Overseas General - X - R1.03 PDFDocument292 pagesPCS-9691 - X - Instruction Manual - EN - Overseas General - X - R1.03 PDFBarry79x100% (2)
- RoboMind Programming StructuresDocument6 pagesRoboMind Programming StructuresLuis Tadeu Kajin MoNo ratings yet
- Errors PDFDocument8 pagesErrors PDFada sdgsdNo ratings yet
- CPDS Assignmeny-1 - 18691A05DODocument8 pagesCPDS Assignmeny-1 - 18691A05DORama RammuNo ratings yet
- LCC 6310 The Computer As An Expressive MediumDocument23 pagesLCC 6310 The Computer As An Expressive MediumlaurafriesNo ratings yet
- Control Flow: Decision MakingDocument12 pagesControl Flow: Decision MakingRanadheer ReddyNo ratings yet
- Binomial ExpansionDocument16 pagesBinomial ExpansionAlex ManihurukNo ratings yet
- Python Fundamental For Data Science-1Document62 pagesPython Fundamental For Data Science-1mochammad asril berlian abdullahNo ratings yet
- Computer Club - Session 3Document27 pagesComputer Club - Session 3Ahmad Al ShafiiNo ratings yet
- Hw3sol PsDocument10 pagesHw3sol PsDenis NgureNo ratings yet
- Lecture 4Document10 pagesLecture 4Shubh RajNo ratings yet
- Prob 2Document6 pagesProb 2raghavNo ratings yet
- Python Basics - Python Syntax: Whitespace and IndentationDocument18 pagesPython Basics - Python Syntax: Whitespace and Indentationيُ يَNo ratings yet
- Week 1c Control Flow and ArraysDocument6 pagesWeek 1c Control Flow and ArraysJerech YapNo ratings yet
- CS3110 Prelim 2 SP09Document9 pagesCS3110 Prelim 2 SP09Lee GaoNo ratings yet
- Turtle Graphic BoitenDocument19 pagesTurtle Graphic BoitenLeonóra DérNo ratings yet
- Experiment #2Document17 pagesExperiment #2Jhustine CañeteNo ratings yet
- Programming AmonDocument24 pagesProgramming AmonamonNo ratings yet
- RecursionProbSetA SolnDocument4 pagesRecursionProbSetA SolnManansh Ram Thakur 4-Year B.Tech. Mechanical EngineeringNo ratings yet
- U5L07 - Activity Guide - Will It CrashDocument6 pagesU5L07 - Activity Guide - Will It CrashShatha AlyazoriNo ratings yet
- Chapter 7 Intermediate RepresentationDocument29 pagesChapter 7 Intermediate RepresentationmoienNo ratings yet
- Introduction To Programming in MATLAB: 2 + 2 3 5 4 2 SQRT (9) Sin (Pi/2) Mod (7,3)Document7 pagesIntroduction To Programming in MATLAB: 2 + 2 3 5 4 2 SQRT (9) Sin (Pi/2) Mod (7,3)16rock9999No ratings yet
- CMP 202 (Sorting)Document17 pagesCMP 202 (Sorting)Akorede BashirNo ratings yet
- Topic 4 - Control StructuresDocument11 pagesTopic 4 - Control StructuresMUBARAK ABDALRAHMANNo ratings yet
- 6 Loop Break Continue GotoDocument28 pages6 Loop Break Continue GotoBudanam TejaswiniNo ratings yet
- StackDocument52 pagesStackdhanushsaikodeNo ratings yet
- Maple FormulariumDocument2 pagesMaple FormulariumKwikkieNo ratings yet
- 5 Flow ControlDocument16 pages5 Flow ControlVasantha PeramNo ratings yet
- Advanced Matlab Programming: Flow ControlDocument38 pagesAdvanced Matlab Programming: Flow ControlJagpreet5370No ratings yet
- Programming Language Theory NotesDocument61 pagesProgramming Language Theory NotesLee GaoNo ratings yet
- Lecture 2Document50 pagesLecture 2Hassan GDOURANo ratings yet
- Doubly Linked List & RecursionDocument12 pagesDoubly Linked List & RecursionNehaNo ratings yet
- Com221 Note 2Document6 pagesCom221 Note 2Ramadan AdamuNo ratings yet
- Bool Bool True False False True: Lawvere's Fixed Point TheoremDocument11 pagesBool Bool True False False True: Lawvere's Fixed Point TheoremΓιάννης ΣτεργίουNo ratings yet
- Lab. 1 Matlab Functions, Filtering and Aliasing PART-1: Familiarization With MATLABDocument5 pagesLab. 1 Matlab Functions, Filtering and Aliasing PART-1: Familiarization With MATLAByahya sogodokNo ratings yet
- Digital Image Processing in MatlabDocument42 pagesDigital Image Processing in MatlabHira MazharNo ratings yet
- Chapter 1Document41 pagesChapter 1patrldainik2412No ratings yet
- First - Order LogicDocument14 pagesFirst - Order LogiclimuviNo ratings yet
- Mock Exam EndtermDocument11 pagesMock Exam EndtermSandeep Chaudhary KurmiNo ratings yet
- Statements: Expressions, When Terminated by A Semicolon, Become Statements. ExamplesDocument10 pagesStatements: Expressions, When Terminated by A Semicolon, Become Statements. ExamplesSaqib AminNo ratings yet
- TraceDocument7 pagesTraceAmalia M OlaruNo ratings yet
- 4 ParsingDocument55 pages4 ParsingBhaskar PNo ratings yet
- 2) Conditionally Executing InstructionsDocument20 pages2) Conditionally Executing InstructionsRyanNo ratings yet
- Matlab Chapter3Document16 pagesMatlab Chapter3Giulia IoriNo ratings yet
- BCA Computer Concept & C Programming SEMESTER - 1 ST AssignmentDocument7 pagesBCA Computer Concept & C Programming SEMESTER - 1 ST Assignmentmanoj_yadav_129% (7)
- Aho-3 7Document5 pagesAho-3 7IovannyNo ratings yet
- Summary of Postscript Commands: 1. Mathematical FunctionsDocument9 pagesSummary of Postscript Commands: 1. Mathematical FunctionslaoraculoNo ratings yet
- Ads by Google: in The Examples That Will Follow, The Color For The First Layer IsDocument6 pagesAds by Google: in The Examples That Will Follow, The Color For The First Layer IsRedcon SerraNo ratings yet
- Java - For Each LoopDocument22 pagesJava - For Each LoopsangeethavcNo ratings yet
- Solutions To In-Class Problems Week 5, WedDocument5 pagesSolutions To In-Class Problems Week 5, WedrizkiNo ratings yet
- Background Information:: Name of Learner: - SectionDocument8 pagesBackground Information:: Name of Learner: - SectionNormalah D LalaNo ratings yet
- Differentiation - in A Nutshell: The FundamentalsDocument14 pagesDifferentiation - in A Nutshell: The FundamentalsRaghav GoelNo ratings yet
- PROGRAMMING LANGUAGE BASICS Part 2Document5 pagesPROGRAMMING LANGUAGE BASICS Part 2Jay GaleNo ratings yet
- Lab 2Document9 pagesLab 2Mashood AhmadNo ratings yet
- 2nd Class - Control StructuresDocument11 pages2nd Class - Control StructuresJadhav SuryakanthNo ratings yet
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- Computer TRICKS First PartDocument10 pagesComputer TRICKS First PartSantu NandiNo ratings yet
- SolidCAM 2017 Imachining Getting Started PDFDocument43 pagesSolidCAM 2017 Imachining Getting Started PDFIvkraNo ratings yet
- Follow Me Documentation Ver1.3Document11 pagesFollow Me Documentation Ver1.3veronleNo ratings yet
- QE1008-W SET: Operating ManualDocument38 pagesQE1008-W SET: Operating ManualGopal HegdeNo ratings yet
- Purchase Order TrackerDocument7 pagesPurchase Order Trackersetia uNo ratings yet
- Make Your Website Work For You - Final Slide Deck 2022Document59 pagesMake Your Website Work For You - Final Slide Deck 2022yara202No ratings yet
- NCS CoreDocument26 pagesNCS CoretareqNo ratings yet
- What Is OSI ModelDocument3 pagesWhat Is OSI ModelAhmad Raza100% (1)
- Ramanujan Computing Centre Anna University: CHENNAI-600 025, INDIADocument2 pagesRamanujan Computing Centre Anna University: CHENNAI-600 025, INDIAmails2ranjithNo ratings yet
- COS1512 104 - 2015 - 1 - eDocument9 pagesCOS1512 104 - 2015 - 1 - eLina Slabbert-van Der WaltNo ratings yet
- Orange3 Text PDFDocument53 pagesOrange3 Text PDFfajrina rinaNo ratings yet
- Linksys srw208Document86 pagesLinksys srw208Ivan Ernesto MillaNo ratings yet
- Manual LindoDocument6 pagesManual LindoJorge Ortiz OrdinolaNo ratings yet
- Edpm SbaDocument20 pagesEdpm SbaDärkßkiñ Tæy TæyNo ratings yet
- Huawei OceanStor S2600T S5500T S5600T S5800T DatasheetDocument2 pagesHuawei OceanStor S2600T S5500T S5600T S5800T DatasheetSundaresan SwaminathanNo ratings yet
- Introduction To Ansys Meshing 16.0 PDFDocument17 pagesIntroduction To Ansys Meshing 16.0 PDFAmer MehmoodNo ratings yet
- Blueid Online Photo Upload PDFDocument7 pagesBlueid Online Photo Upload PDFBlessed MatthewNo ratings yet
- 3 2 23 989Document6 pages3 2 23 989Dian PriambudiNo ratings yet
- English Debate Text Motion 2Document2 pagesEnglish Debate Text Motion 2Nur Fatin Firzanah Mohd FauziNo ratings yet
- XPrinter User GuideDocument58 pagesXPrinter User GuideRaje FaizulNo ratings yet
- The Enochian Holy TableDocument3 pagesThe Enochian Holy TablePatrick Mulcahy100% (15)
- Sample Rafter DetailDocument1 pageSample Rafter DetailShawkat AliNo ratings yet
- Synology DiskStation MIB Guide PDFDocument15 pagesSynology DiskStation MIB Guide PDFAngel PerezNo ratings yet
- 1.4 Types of ComputerDocument6 pages1.4 Types of ComputernamjoonNo ratings yet
- OptimizationDocument13 pagesOptimizationAli AcıoğluNo ratings yet
- How To Develop ABAP RICEF Objects in SDocument23 pagesHow To Develop ABAP RICEF Objects in SAdaikalam Alexander Rayappa50% (2)
- MIS Techmax (Searchable)Document64 pagesMIS Techmax (Searchable)hell noNo ratings yet