Download as pdf or txt
You might also like
- Friction VS Frictionless MechanicsDocument195 pagesFriction VS Frictionless MechanicsDayal Sharan100% (5)
- CH 02Document37 pagesCH 02AndrésFelipeMeloNo ratings yet
- Resonance Study Material Class 10Document102 pagesResonance Study Material Class 10Srinivas Venkataraman100% (1)
- Advantages of GroundingDocument3 pagesAdvantages of GroundingNabarunSarma100% (1)
- Stress Analysis of TEEDocument7 pagesStress Analysis of TEEEPCFirmNo ratings yet
- ThermodynamicsDocument2 pagesThermodynamicsRachita Prakash Saraf0% (1)
- Mech LND 2019R2 EN LE01Document19 pagesMech LND 2019R2 EN LE01MANU S NNo ratings yet
- Normal Modes of Vibration On A String: X X X T+ X X TDocument3 pagesNormal Modes of Vibration On A String: X X X T+ X X TJESSICA BERENICE SANDOVAL REYESNo ratings yet
- Vibration Chapter 01-Ver1Document31 pagesVibration Chapter 01-Ver1Mat MatttNo ratings yet
- Lecture 6 - Peak Response SDOFs and Response SpectraDocument32 pagesLecture 6 - Peak Response SDOFs and Response SpectraTerry McManamanNo ratings yet
- EE 5344 - Introduction To MEMS CHAPTER 6 Mechanical Sensors I. Mechanical Measurands: 1. Classification of Main TypesDocument7 pagesEE 5344 - Introduction To MEMS CHAPTER 6 Mechanical Sensors I. Mechanical Measurands: 1. Classification of Main TypesRamachandra ReddyNo ratings yet
- Aett ZG 524-L2Document17 pagesAett ZG 524-L2Gopal AthaniNo ratings yet
- Dynamics: Kinetics of Particles: Impuls & MomentumDocument36 pagesDynamics: Kinetics of Particles: Impuls & MomentumFatih TürkoğluNo ratings yet
- Structural DampingDocument36 pagesStructural DampingOleNo ratings yet
- BTECH JournalDocument4 pagesBTECH Journalashith kodavanjiNo ratings yet
- Ultrafast Optics: Prof. Rick Trebino Georgia Tech WWW - Physics.gatech. Edu/frogDocument43 pagesUltrafast Optics: Prof. Rick Trebino Georgia Tech WWW - Physics.gatech. Edu/frogWawanNo ratings yet
- Control DifusoDocument5 pagesControl DifusoHernanSanabriaNo ratings yet
- ACT-NAN-0415 2 Wouters Memristors DW FinalDocument42 pagesACT-NAN-0415 2 Wouters Memristors DW FinalVojislav MedićNo ratings yet
- מאמר4Document3 pagesמאמר4yanivNo ratings yet
- Triple Frictional Pendulum PDFDocument18 pagesTriple Frictional Pendulum PDFpsh1979No ratings yet
- Vibrations BasicDocument19 pagesVibrations Basichamza saleemNo ratings yet
- LectureNotes Antennas DR - SerkanaksoyDocument13 pagesLectureNotes Antennas DR - SerkanaksoyRahil HusainNo ratings yet
- 1 Introduction HS19-2Document83 pages1 Introduction HS19-2Hongming FanNo ratings yet
- Lecture By: Dr. Mohamed Osman: Introduction & Rectilinear Kinematics: Continuous Motion Today's ObjectivesDocument4 pagesLecture By: Dr. Mohamed Osman: Introduction & Rectilinear Kinematics: Continuous Motion Today's ObjectivesLee Yann LynnNo ratings yet
- Science q2 Reviewer Google DocsDocument8 pagesScience q2 Reviewer Google DocsTirao, Lizette Luz O.No ratings yet
- Vibration Week 1 & 2Document13 pagesVibration Week 1 & 2SYEDOUNMUHAMMAD ZAIDINo ratings yet
- ME597/PHYS57000 Fall Semester 2010 The Transition From STM To AFM Ron Reifenberger Birck Nanotechnology Center Purdue UniversityDocument18 pagesME597/PHYS57000 Fall Semester 2010 The Transition From STM To AFM Ron Reifenberger Birck Nanotechnology Center Purdue Universitykishorkumarn8212No ratings yet
- Hybrid Electric Vehicle Hybrid Electric VehicleDocument34 pagesHybrid Electric Vehicle Hybrid Electric VehicleSo Khuong LeangNo ratings yet
- Lec HV 02 Electrical Safety QuickDocument34 pagesLec HV 02 Electrical Safety QuickSo Khuong LeangNo ratings yet
- Noise and Vibrations HVACDocument56 pagesNoise and Vibrations HVACBalasubramani vNo ratings yet
- Getaran Mekanik Pertemuan 02Document11 pagesGetaran Mekanik Pertemuan 02Feliks SutrisnoNo ratings yet
- MHD Galtier PDFDocument90 pagesMHD Galtier PDFsoumitrahazraNo ratings yet
- A Study On Impulse Noise and Its ModelsDocument13 pagesA Study On Impulse Noise and Its ModelszubairNo ratings yet
- Ph3151 All 5 Chapter NotesDocument108 pagesPh3151 All 5 Chapter NotesGowtham KumarasamyNo ratings yet
- BDS Unit 2 - NoRestrictionDocument41 pagesBDS Unit 2 - NoRestrictionRameshNo ratings yet
- (2008) Fractional Calculus Applied To Model Arterial ViscoelasticityDocument6 pages(2008) Fractional Calculus Applied To Model Arterial ViscoelasticityNam Huu TranNo ratings yet
- Vibration Chapter 02-Ver1Document39 pagesVibration Chapter 02-Ver1Mat MatttNo ratings yet
- Lecture 8 - Nonlinear SpectraDocument38 pagesLecture 8 - Nonlinear SpectraTerry McManamanNo ratings yet
- Vibration - Chapter 02-Ver1Document39 pagesVibration - Chapter 02-Ver1Aidil.K.NasutionNo ratings yet
- First Page PDFDocument1 pageFirst Page PDFRehan Al FahriNo ratings yet
- 9 Phy Together CH 9 SoundDocument19 pages9 Phy Together CH 9 Soundjhbhatt1603No ratings yet
- Natural Frequency, Ride Frequency and Their InfluenceDocument5 pagesNatural Frequency, Ride Frequency and Their InfluenceMielito CalparsoroNo ratings yet
- Me6505 DM Mech VST Au Unit III PDFDocument18 pagesMe6505 DM Mech VST Au Unit III PDFMechanical EngineeringNo ratings yet
- ME 6505 - Dynamics of Machines: Fifth Semester Mechanical Engineering (RegulationsDocument18 pagesME 6505 - Dynamics of Machines: Fifth Semester Mechanical Engineering (RegulationsshivendrakumarNo ratings yet
- DSI On Line Training - EditedDocument13 pagesDSI On Line Training - EditedGoals GoalsNo ratings yet
- Rocketry MITDocument303 pagesRocketry MITArmando SuberoNo ratings yet
- Instrumental Methods of Chemical Analysis: Infrared SpectrosDocument120 pagesInstrumental Methods of Chemical Analysis: Infrared SpectrosBhagyashree Pani100% (1)
- Classical Mechanics: ForceDocument2 pagesClassical Mechanics: ForcevinodNo ratings yet
- Mire VibrationDocument362 pagesMire VibrationMuket AgmasNo ratings yet
- University of Gondar School of Technology Department of Mechanical EngineeringDocument184 pagesUniversity of Gondar School of Technology Department of Mechanical EngineeringMuket AgmasNo ratings yet
- Spectroscopy: Lecture 5: Application of Raman SpectrosDocument50 pagesSpectroscopy: Lecture 5: Application of Raman SpectrosMurali Krishna.HARINo ratings yet
- L02 MRI Part 1 UpdatedDocument19 pagesL02 MRI Part 1 Updatedlolpoll771No ratings yet
- Introduction To Electric Shock Protection - Lutfi Al-SharifDocument9 pagesIntroduction To Electric Shock Protection - Lutfi Al-SharifHerman FinolNo ratings yet
- UCE802 Earthquake SyllabusDocument2 pagesUCE802 Earthquake Syllabuskullu88No ratings yet
- Lecture 07 Mechanical Properties 2Document20 pagesLecture 07 Mechanical Properties 2antoine demeireNo ratings yet
- Lecture # 01 (Introduction To Mechanical Vibrations)Document38 pagesLecture # 01 (Introduction To Mechanical Vibrations)Anonymous uebb81No ratings yet
- Calculationof Natural Frequencies of Mdof System: A. Sivaji, G.Naveen KumarDocument7 pagesCalculationof Natural Frequencies of Mdof System: A. Sivaji, G.Naveen KumarChinna MandaraNo ratings yet
- Studies On Damage Localization For Pole Type StructuresDocument23 pagesStudies On Damage Localization For Pole Type StructuresSube OhNo ratings yet
- Vibration and Engineering Design: (Perspective of A Mechanical Engineer Working in Vibration Related Problems)Document50 pagesVibration and Engineering Design: (Perspective of A Mechanical Engineer Working in Vibration Related Problems)rough_rushNo ratings yet
- CE2403-Basics of Dynamics and Asiesmic Design QBDocument9 pagesCE2403-Basics of Dynamics and Asiesmic Design QBAnpu SNo ratings yet
- SD & Eq QB PDFDocument11 pagesSD & Eq QB PDFvinodh159No ratings yet
- New Directions in Dynamical Systems, Automatic Control and Singular PerturbationsFrom EverandNew Directions in Dynamical Systems, Automatic Control and Singular PerturbationsNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
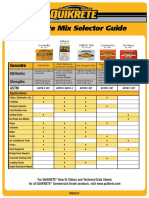
- Concrete Mix Selector GuideDocument1 pageConcrete Mix Selector GuideTerry McManamanNo ratings yet
- Ali Sarmah STOTENPaper2017Document10 pagesAli Sarmah STOTENPaper2017Terry McManamanNo ratings yet
- Study On Damage of Concrete Under Uniaxial Compression Based On Electrical Resistivity MethodDocument12 pagesStudy On Damage of Concrete Under Uniaxial Compression Based On Electrical Resistivity MethodTerry McManamanNo ratings yet
- Abalaka2013 Article StrengthAndSomeDurabilityPropeDocument7 pagesAbalaka2013 Article StrengthAndSomeDurabilityPropeTerry McManamanNo ratings yet
- Appendix - Ii: Response Spectra of El-Centro, 1940 Earthquake Ground MotionDocument7 pagesAppendix - Ii: Response Spectra of El-Centro, 1940 Earthquake Ground MotionTerry McManamanNo ratings yet
- Construction and Building Materials: Festus A. Olutoge, Peter A. AdesinaDocument9 pagesConstruction and Building Materials: Festus A. Olutoge, Peter A. AdesinaTerry McManamanNo ratings yet
- Tutorial Problems: Q1. Determine The Displacement Response Spectra of SDOF System Subjected To EarthquakeDocument5 pagesTutorial Problems: Q1. Determine The Displacement Response Spectra of SDOF System Subjected To EarthquakeTerry McManamanNo ratings yet
- Concrete Cylinder Testing: Astm C 31Document2 pagesConcrete Cylinder Testing: Astm C 31Terry McManamanNo ratings yet
- Tutorial Problems: EI 294772.2 N.MDocument3 pagesTutorial Problems: EI 294772.2 N.MTerry McManamanNo ratings yet
- Appendix - Ii: Response Spectra of El-Centro, 1940 Earthquake Ground MotionDocument7 pagesAppendix - Ii: Response Spectra of El-Centro, 1940 Earthquake Ground MotionTerry McManamanNo ratings yet
- Fifth Edition: Introduction To The Finite Element MethodDocument13 pagesFifth Edition: Introduction To The Finite Element MethodTerry McManamanNo ratings yet
- Fifth Edition: Earthquake Analysis and Response of Inelastic BuildingsDocument77 pagesFifth Edition: Earthquake Analysis and Response of Inelastic BuildingsTerry McManamanNo ratings yet
- Fifth Edition: Earthquake Response of Linearly Elastic BuildingsDocument21 pagesFifth Edition: Earthquake Response of Linearly Elastic BuildingsTerry McManamanNo ratings yet
- Fifth Edition: Structural Dynamics in Building Evaluation Guidelines PreviewDocument20 pagesFifth Edition: Structural Dynamics in Building Evaluation Guidelines PreviewTerry McManamanNo ratings yet
- Lecture 6 - Peak Response SDOFs and Response SpectraDocument32 pagesLecture 6 - Peak Response SDOFs and Response SpectraTerry McManamanNo ratings yet
- Fifth Edition: Structural Dynamics in Building CodesDocument23 pagesFifth Edition: Structural Dynamics in Building CodesTerry McManamanNo ratings yet
- Fifth Edition: Structural Dynamics in Building CodesDocument23 pagesFifth Edition: Structural Dynamics in Building CodesTerry McManamanNo ratings yet
- Lecture 8 - Nonlinear SpectraDocument38 pagesLecture 8 - Nonlinear SpectraTerry McManamanNo ratings yet
- Fifth Edition: Response To Arbitrary, Step, and Pulse ExcitationsDocument29 pagesFifth Edition: Response To Arbitrary, Step, and Pulse ExcitationsTerry McManamanNo ratings yet
- Fifth Edition: Numerical Evaluation of Dynamic ResponseDocument15 pagesFifth Edition: Numerical Evaluation of Dynamic ResponseTerry McManamanNo ratings yet
- Fifth Edition: Numerical Evaluation of Dynamic ResponseDocument15 pagesFifth Edition: Numerical Evaluation of Dynamic ResponseTerry McManamanNo ratings yet
- Fifth Edition: Earthquake Response of Inelastic SystemsDocument46 pagesFifth Edition: Earthquake Response of Inelastic SystemsTerry McManamanNo ratings yet
- Fifth Edition: Earthquake Response of Linear SystemsDocument57 pagesFifth Edition: Earthquake Response of Linear SystemsTerry McManamanNo ratings yet
- Eee3005 Design-Of-electrical-Apparatus Eth 1.0 37 Eee3005Document2 pagesEee3005 Design-Of-electrical-Apparatus Eth 1.0 37 Eee3005Amal AnilNo ratings yet
- HEAT TRANSFER - Chapter 2Document2 pagesHEAT TRANSFER - Chapter 2ghostlenyNo ratings yet
- Predicting Nonlinear Behavior and Stress-Strain Relationship of Rectangular Confined Reinforced Concrete Columns With ANSYSDocument9 pagesPredicting Nonlinear Behavior and Stress-Strain Relationship of Rectangular Confined Reinforced Concrete Columns With ANSYSraunak upadhyayaNo ratings yet
- Polymer Rheology and Processing ( - ÈDocument57 pagesPolymer Rheology and Processing ( - Èabilio_j_vieiraNo ratings yet
- Gravitation MCQsDocument1 pageGravitation MCQsKunalKaushikNo ratings yet
- F3 Chapter 9 & 10Document2 pagesF3 Chapter 9 & 10Teh Chu LeongNo ratings yet
- PHY 001 (Physics I) : Instructor: Dr. Mohamed Fouad SalemDocument26 pagesPHY 001 (Physics I) : Instructor: Dr. Mohamed Fouad SalemJiyan LitohonNo ratings yet
- Mechanical Engineering Course Structure - Ug (CBCS) Subject Code Subject Title LT P C I E TMDocument8 pagesMechanical Engineering Course Structure - Ug (CBCS) Subject Code Subject Title LT P C I E TMgopichandallakaNo ratings yet
- Assignment 7, Phys-206Document2 pagesAssignment 7, Phys-206Tajinder Singh Randhawa100% (1)
- 13 11 08 13 27 26 2265 VeluDocument59 pages13 11 08 13 27 26 2265 VeluAnusha KothaNo ratings yet
- Andhra Pradesh Public Service Commission: HyderabadDocument46 pagesAndhra Pradesh Public Service Commission: HyderabadRamesh IswaraNo ratings yet
- Lecture Notes On Statics of Rigid BodiesDocument184 pagesLecture Notes On Statics of Rigid BodiesLeandro S. DaceraNo ratings yet
- Practical 2 GuideDocument2 pagesPractical 2 GuideJeffrey PiggottNo ratings yet
- 3408 Project Review 2Document39 pages3408 Project Review 2madhavi surepalliNo ratings yet
- Chapter 4. Design of Non-Anchored Restraint Retaining WallDocument45 pagesChapter 4. Design of Non-Anchored Restraint Retaining WallFaroq MaraqaNo ratings yet
- Appendix Trigonometry Properties & Fourier Series: DT T X T A DT T X T ADocument5 pagesAppendix Trigonometry Properties & Fourier Series: DT T X T A DT T X T AFarah Liyana RahimNo ratings yet
- Lecture 1 Graph TheoryDocument18 pagesLecture 1 Graph Theoryfalu_29No ratings yet
- Department of Applied Sciences & Humanities University Institute of Engineering and Technology (UIET) Kurukshetra University, KurukshetraDocument3 pagesDepartment of Applied Sciences & Humanities University Institute of Engineering and Technology (UIET) Kurukshetra University, Kurukshetraajay kumar sharmaNo ratings yet
- Critical Analysis of Safety Related Design of Powered GatesDocument59 pagesCritical Analysis of Safety Related Design of Powered GatesTarek TarekNo ratings yet
- Vector Calculus GATE Study Material in PDF 1Document10 pagesVector Calculus GATE Study Material in PDF 1nazeeraNo ratings yet
- By C.ANIL KUMAR (07AG1A0411)Document15 pagesBy C.ANIL KUMAR (07AG1A0411)Anil KumarNo ratings yet
- Termodinamica de Hidrocarburos: Maria A. BarrufetDocument61 pagesTermodinamica de Hidrocarburos: Maria A. Barrufet13670319No ratings yet
- 03MC0132 Rev. 00Document11 pages03MC0132 Rev. 0089deveshNo ratings yet
- DPP 1 - Mathematical Tools & Vector PDFDocument2 pagesDPP 1 - Mathematical Tools & Vector PDFRahul BNo ratings yet