Download as pdf or txt
You might also like
- Material Designer Users GuideDocument88 pagesMaterial Designer Users Guideyash pradhan100% (1)
- Ecotank l5296 DatasheetDocument2 pagesEcotank l5296 DatasheetIulian ChirilăNo ratings yet
- Stanley - mc521 - Pro - Controller - Quick-Reference Guide PDFDocument28 pagesStanley - mc521 - Pro - Controller - Quick-Reference Guide PDFRubén Pérez ArmasNo ratings yet
- S 30FP SpecificationDocument22 pagesS 30FP SpecificationRubén Pérez Armas50% (2)
- Eikon Exam Sample 1Document8 pagesEikon Exam Sample 1Jad Zoghaib100% (1)
- A Novel Hybrid Genetic Algorithm To Solve The Make-To-Order Sequence-Dependent Flow-Shop Scheduling ProblemDocument9 pagesA Novel Hybrid Genetic Algorithm To Solve The Make-To-Order Sequence-Dependent Flow-Shop Scheduling ProblemVerdianto PradanaNo ratings yet
- European Journal of Operational Research: Eva Vallada, Rubén RuizDocument11 pagesEuropean Journal of Operational Research: Eva Vallada, Rubén RuizOlivia brianneNo ratings yet
- Benders Decomposition For The Mixed No-Idle Permutation Flowshop Scheduling ProblemDocument11 pagesBenders Decomposition For The Mixed No-Idle Permutation Flowshop Scheduling ProblemRegis GomesNo ratings yet
- 1 s2.0 S0377221721002605 MainDocument17 pages1 s2.0 S0377221721002605 MainYoya LoyaNo ratings yet
- Group13 - 13000119059 - Flow Shop SchedulingDocument8 pagesGroup13 - 13000119059 - Flow Shop SchedulingKaustav DeyNo ratings yet
- A Variable Capacity Parallel Machine Scheduling ProblemDocument7 pagesA Variable Capacity Parallel Machine Scheduling Problemieom2012No ratings yet
- An Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling ProblemDocument13 pagesAn Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling Problemzrdasma01No ratings yet
- Scheduling Unrelated Parallel Machines With Sequence-Dependent Setup TimesDocument10 pagesScheduling Unrelated Parallel Machines With Sequence-Dependent Setup TimesOlivia brianneNo ratings yet
- Aldowaisan-Allahverdi2012 Article No-waitFlowshopSchedulingProblDocument13 pagesAldowaisan-Allahverdi2012 Article No-waitFlowshopSchedulingProblcengizNo ratings yet
- A Ga-Sa Multiobjective Hybrid Search Algorithm For Integrating Lot Sizing and Sequencing in Flow-Line SchedulingDocument12 pagesA Ga-Sa Multiobjective Hybrid Search Algorithm For Integrating Lot Sizing and Sequencing in Flow-Line SchedulingASHWEENA A/P SUNDARNo ratings yet
- Hybrid Flexible Flowshop Scheduling Problem With Unrelated Parallel Machines and Limited Waiting TimesDocument17 pagesHybrid Flexible Flowshop Scheduling Problem With Unrelated Parallel Machines and Limited Waiting TimesOlivia brianneNo ratings yet
- Computers & Industrial Engineering: Guohui Zhang, Xinyu Shao, Peigen Li, Liang GaoDocument10 pagesComputers & Industrial Engineering: Guohui Zhang, Xinyu Shao, Peigen Li, Liang Gaocloud69windNo ratings yet
- GESPRO Harmonie Discrete SearchDocument10 pagesGESPRO Harmonie Discrete Searchzrdasma01No ratings yet
- GA Job SchedullingDocument6 pagesGA Job Schedullingbudi2326No ratings yet
- A H A F J S S W M C: N Efficient Euristic Lgorithm For Lexible OB HOP Cheduling ITH Aintenance OnstraintsDocument13 pagesA H A F J S S W M C: N Efficient Euristic Lgorithm For Lexible OB HOP Cheduling ITH Aintenance OnstraintsRaj PawarNo ratings yet
- This Is The Pre-Published Version.: Corresponding AuthorDocument26 pagesThis Is The Pre-Published Version.: Corresponding AuthorMohammed Al-FtesiNo ratings yet
- Ching Ying. 2018. Improved Exact Methods For Solving No-Wait Flowshop Scheduling Problems With Due Date ConstraintsDocument12 pagesChing Ying. 2018. Improved Exact Methods For Solving No-Wait Flowshop Scheduling Problems With Due Date Constraintsmilyhya fgNo ratings yet
- The Open Shop Scheduling ProblemDocument45 pagesThe Open Shop Scheduling ProblemPavan kishore KarurNo ratings yet
- Manufacturing Management ProjectDocument15 pagesManufacturing Management ProjectHazem ElbannaNo ratings yet
- Review On Job-Shop and Flow-Shop Scheduling Using Multi Criteria Decision MakingDocument17 pagesReview On Job-Shop and Flow-Shop Scheduling Using Multi Criteria Decision MakingKailash C BhosaleNo ratings yet
- Chapter (7) Performance Analysis Techniques: Asmaa Ismail Farah Basil Raua WaleedDocument46 pagesChapter (7) Performance Analysis Techniques: Asmaa Ismail Farah Basil Raua Waleedmhamed alqucyNo ratings yet
- Ijet V3i6p8Document5 pagesIjet V3i6p8International Journal of Engineering and TechniquesNo ratings yet
- RAIRODocument15 pagesRAIRONizar El HachemiNo ratings yet
- Optimal Scheduling of A Two-Stage Hybrid Flow Shop: OriginalarticleDocument18 pagesOptimal Scheduling of A Two-Stage Hybrid Flow Shop: OriginalarticleOlivia brianneNo ratings yet
- PMS2010 PaperDocument5 pagesPMS2010 PaperNNo ratings yet
- Khalouli 2008Document6 pagesKhalouli 2008Nabli ZouhourNo ratings yet
- Hybrid Flow Shop Scheduling With Sequence Dependent Family Setup Time and Uncertain Due DatesDocument35 pagesHybrid Flow Shop Scheduling With Sequence Dependent Family Setup Time and Uncertain Due Datesdaimon_pNo ratings yet
- A Novel Imperialist Competitive Algorithm To Solve Flexible Flow Shop Scheduling Problem in Order To Minimize Maximum Completion TimeDocument6 pagesA Novel Imperialist Competitive Algorithm To Solve Flexible Flow Shop Scheduling Problem in Order To Minimize Maximum Completion TimeAhmed HassanNo ratings yet
- Application of GATS, A Hybrid Mega-Heuristic Model, and DOE, To Solve Flexible Flow Shop Scheduling Problems: A Case StudyDocument8 pagesApplication of GATS, A Hybrid Mega-Heuristic Model, and DOE, To Solve Flexible Flow Shop Scheduling Problems: A Case StudyBOHR International Journal of Operations Management Research and Practices (BIJOMRP)No ratings yet
- Project Work (Uniben) RetouchedDocument26 pagesProject Work (Uniben) RetouchedClement Ofoluwanyo100% (1)
- Unrelated Parallel Machine Scheduling With Setup Times Using Simulated AnnealingDocument9 pagesUnrelated Parallel Machine Scheduling With Setup Times Using Simulated AnnealingOlivia brianneNo ratings yet
- Detienne 2016Document11 pagesDetienne 2016bilalkhurshidNo ratings yet
- A Branch-And-Bound Algorithm For The Hybrid #Owshop: O. Moursli !,, Y. Pochet!,"Document13 pagesA Branch-And-Bound Algorithm For The Hybrid #Owshop: O. Moursli !,, Y. Pochet!,"Ketut Edy SetiawanNo ratings yet
- A Genetic Algorithm For Solving Two-Sided Assembly Line Balancing ProblemsDocument14 pagesA Genetic Algorithm For Solving Two-Sided Assembly Line Balancing ProblemsAbouSalsabilNo ratings yet
- Scheduling Jobs With Values Exponentially Deteriorating Over Time in A Job Shop EnvironmentDocument6 pagesScheduling Jobs With Values Exponentially Deteriorating Over Time in A Job Shop EnvironmentDavid ValleNo ratings yet
- Vehicle Routing Problem With Time Windows A Hybrid Particle Swarm Optimization ApproachDocument5 pagesVehicle Routing Problem With Time Windows A Hybrid Particle Swarm Optimization ApproachEren BaharözüNo ratings yet
- A Genetic Algorithm Approach For The Time-Cost Trade-Off in PERT NetworksDocument23 pagesA Genetic Algorithm Approach For The Time-Cost Trade-Off in PERT NetworksLeonardo BaganhaNo ratings yet
- Schedule 6Document7 pagesSchedule 6ssfofoNo ratings yet
- A Chaotic Particle Swarm Optimization Algorithm For The Jobshop Scheduling ProblemDocument5 pagesA Chaotic Particle Swarm Optimization Algorithm For The Jobshop Scheduling ProblemKarim EL BouyahyiouyNo ratings yet
- SchedulingDocument6 pagesSchedulingVanderli AlvesNo ratings yet
- A New Adaptive Neural Network and Heuristics Hybrid Approach For Job-Shop SchedulingDocument6 pagesA New Adaptive Neural Network and Heuristics Hybrid Approach For Job-Shop SchedulingmissaouiNo ratings yet
- Flexible Job-Shop Scheduling With TRIBES-PSO ApproachDocument9 pagesFlexible Job-Shop Scheduling With TRIBES-PSO ApproachJournal of ComputingNo ratings yet
- Two-Agent-Based Single-Machine Scheduling With Switchover Time To Minimize Total Weighted Completion Time and Makespan ObjectivesDocument18 pagesTwo-Agent-Based Single-Machine Scheduling With Switchover Time To Minimize Total Weighted Completion Time and Makespan ObjectivesShalika SinhaNo ratings yet
- Nishida 2019Document6 pagesNishida 2019nguyenthanhNo ratings yet
- A Review On Parallel Scheduling of Machines and AGV'S in An FMS EnvironmentDocument8 pagesA Review On Parallel Scheduling of Machines and AGV'S in An FMS EnvironmentInternational Journal of computational Engineering research (IJCER)No ratings yet
- Hemisfic Methods For Flexible Flow Ime Scheduling: Sandeep Koehher, Harvard University, Cambridge, MassachusettsDocument16 pagesHemisfic Methods For Flexible Flow Ime Scheduling: Sandeep Koehher, Harvard University, Cambridge, MassachusettsDimitri CayardNo ratings yet
- Content ServerDocument13 pagesContent ServerAntoniojuarezjuarezNo ratings yet
- Multi-Job Lot Streaming To Minimize The Mean Completion Time in m-1 Hybrid OwshopsDocument12 pagesMulti-Job Lot Streaming To Minimize The Mean Completion Time in m-1 Hybrid OwshopsOlivia brianneNo ratings yet
- A Suboptimal Heuristic Algorithm For Solving The Assembly Line Worker Assignment and Balancing Problem ALWABPDocument7 pagesA Suboptimal Heuristic Algorithm For Solving The Assembly Line Worker Assignment and Balancing Problem ALWABPerpublicationNo ratings yet
- Optimization of Cycle Time in An Assembly Line Balancing ProblemDocument8 pagesOptimization of Cycle Time in An Assembly Line Balancing ProblemLinda Ayu Kusuma WardaniNo ratings yet
- An Improved Heuristic For The Single Machine Weighted Tardiness Problem 1999 OmegaDocument11 pagesAn Improved Heuristic For The Single Machine Weighted Tardiness Problem 1999 OmegaUmang SoniNo ratings yet
- Scheduling Unrelated Parallel Machines (Tem Instacias No Site)Document18 pagesScheduling Unrelated Parallel Machines (Tem Instacias No Site)Guilherme WeisNo ratings yet
- Amulti Phasecoveringpareto OptimalfrontmethodDocument28 pagesAmulti Phasecoveringpareto OptimalfrontmethodarpitdagreatNo ratings yet
- 1 Ijmperdfeb20171Document12 pages1 Ijmperdfeb20171TJPRC PublicationsNo ratings yet
- InTech-On Line Scheduling On Identical Machines For Jobs With Arbitrary Release TimesDocument23 pagesInTech-On Line Scheduling On Identical Machines For Jobs With Arbitrary Release TimesssfofoNo ratings yet
- Investigating Real-Time Specifications For C#Document8 pagesInvestigating Real-Time Specifications For C#abc123asdNo ratings yet
- Algoritmo HbbaDocument11 pagesAlgoritmo HbbaDocente Fede TecnologicoNo ratings yet
- Flow Shop Scheduling Problem A Computational StudyDocument14 pagesFlow Shop Scheduling Problem A Computational Studyrajesh rNo ratings yet
- Stille Imagiq2 Service ManualDocument80 pagesStille Imagiq2 Service ManualRubén Pérez ArmasNo ratings yet
- 8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega48/V Atmega88/V Atmega168/V PreliminaryDocument33 pages8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega48/V Atmega88/V Atmega168/V PreliminaryRubén Pérez ArmasNo ratings yet
- Research Article: Multiple-Try Simulated Annealing Algorithm For Global OptimizationDocument12 pagesResearch Article: Multiple-Try Simulated Annealing Algorithm For Global OptimizationRubén Pérez ArmasNo ratings yet
- Reference Nablend SeriesDocument8 pagesReference Nablend SeriesRubén Pérez ArmasNo ratings yet
- NMR Control SolutionsDocument11 pagesNMR Control SolutionsRubén Pérez ArmasNo ratings yet
- Least Median of Squares Regression. Peter J. Rousseeuw, 1984Document10 pagesLeast Median of Squares Regression. Peter J. Rousseeuw, 1984Rubén Pérez ArmasNo ratings yet
- Customizing Pareto Simulated Annealing For Multi-Objective Optimization of Control Cabinet LayoutDocument8 pagesCustomizing Pareto Simulated Annealing For Multi-Objective Optimization of Control Cabinet LayoutRubén Pérez ArmasNo ratings yet
- CH04Document44 pagesCH04Rubén Pérez ArmasNo ratings yet
- MINT1400A: Medical - Universal Input Power SupplyDocument3 pagesMINT1400A: Medical - Universal Input Power SupplyRubén Pérez ArmasNo ratings yet
- Boardviewer - Program For Viewing All Types of Boardview FilesDocument1 pageBoardviewer - Program For Viewing All Types of Boardview FilesRubén Pérez ArmasNo ratings yet
- PCM-9375 DS (01.15.14) 20140205145233Document2 pagesPCM-9375 DS (01.15.14) 20140205145233Rubén Pérez ArmasNo ratings yet
- APX Motor Driver DC Fan Application (DSASL0059814)Document14 pagesAPX Motor Driver DC Fan Application (DSASL0059814)Rubén Pérez ArmasNo ratings yet
- User Manual: 3.5" SBC w/AMD LX800, VGA, LCD, LAN, USB2.0 and SSDDocument110 pagesUser Manual: 3.5" SBC w/AMD LX800, VGA, LCD, LAN, USB2.0 and SSDRubén Pérez ArmasNo ratings yet
- CPU Generation: "2" in Last Code "1" in Last CodeDocument39 pagesCPU Generation: "2" in Last Code "1" in Last CodeRubén Pérez ArmasNo ratings yet
- Astm D 613 - Ip 41 & D 2699 - Iso en 25164 - Iso 5163 - Ip 237 - Din 51756 & D 2700 - Iso en 25163 - Iso 5164 - Ip 236Document2 pagesAstm D 613 - Ip 41 & D 2699 - Iso en 25164 - Iso 5163 - Ip 237 - Din 51756 & D 2700 - Iso en 25163 - Iso 5164 - Ip 236Rubén Pérez ArmasNo ratings yet
- Tech Tip Mc521 Pro Controller Slide Door Installation and Operation ManualDocument40 pagesTech Tip Mc521 Pro Controller Slide Door Installation and Operation ManualRubén Pérez ArmasNo ratings yet
- Asus Eee PC 1008HA Rev1.3GDocument50 pagesAsus Eee PC 1008HA Rev1.3GRubén Pérez ArmasNo ratings yet
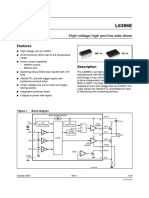
- DS L6386E So-14 Higt-Voltaje DriverDocument18 pagesDS L6386E So-14 Higt-Voltaje DriverRubén Pérez ArmasNo ratings yet
- LC-20SH1E LC-20SH2E: Service ManualDocument55 pagesLC-20SH1E LC-20SH2E: Service ManualRubén Pérez ArmasNo ratings yet
- Asus Eee PC 1101HA Rev1.2Document50 pagesAsus Eee PC 1101HA Rev1.2Rubén Pérez ArmasNo ratings yet
- Acer Aspire 5930GDocument50 pagesAcer Aspire 5930Gperaja12No ratings yet
- Stanley - mc521 - Pro - Control Box Automatic DoorDocument56 pagesStanley - mc521 - Pro - Control Box Automatic DoorRubén Pérez Armas100% (1)
- Asus Eee PC 1002 Rev1.3GDocument50 pagesAsus Eee PC 1002 Rev1.3GRubén Pérez ArmasNo ratings yet
- Acer Aspire 5330 - 5730 Wistron Cathedral Peak RevSBDocument42 pagesAcer Aspire 5330 - 5730 Wistron Cathedral Peak RevSBRubén Pérez ArmasNo ratings yet
- ASUS Eee PC 904H Rev1.1GDocument49 pagesASUS Eee PC 904H Rev1.1GRubén Pérez ArmasNo ratings yet
- How To Use and Troubleshoot The Inspiron 3521 Dell USDocument6 pagesHow To Use and Troubleshoot The Inspiron 3521 Dell USRubén Pérez ArmasNo ratings yet
- A List of Programmable and Non Programmable KBC MicrocontrollerDocument6 pagesA List of Programmable and Non Programmable KBC MicrocontrollerRubén Pérez Armas100% (2)
- Internet Safety Lesson 1Document7 pagesInternet Safety Lesson 1api-397096337No ratings yet
- 604 CA Final ISCA MCQ - by CA Swapnil Patni PDFDocument73 pages604 CA Final ISCA MCQ - by CA Swapnil Patni PDFJitendra Chauhan50% (2)
- Deep Learning Decoding ProblemsDocument103 pagesDeep Learning Decoding ProblemsDnyanesh Walwadkar100% (1)
- Vocabulary Extra: Intermediate Unit 8Document3 pagesVocabulary Extra: Intermediate Unit 8Catalina Garcia DonosoNo ratings yet
- UM8762 - FELib - PSD - Parameters - User - Manual - Rev.2Document59 pagesUM8762 - FELib - PSD - Parameters - User - Manual - Rev.2ernestoNo ratings yet
- Arrays in CsharpDocument10 pagesArrays in CsharpMonti SainiNo ratings yet
- AssessedElement Profile Specification v2.1Document16 pagesAssessedElement Profile Specification v2.1kovacevsinisaNo ratings yet
- Maintain Equipment and Consumables UcDocument42 pagesMaintain Equipment and Consumables Ucአብረሽ ነጋሸ እእነውNo ratings yet
- Econolite EOS Controller SoftwareDocument2 pagesEconolite EOS Controller SoftwareehsanparsonsNo ratings yet
- Final - Online TabulationDocument19 pagesFinal - Online TabulationJobeline EnrileNo ratings yet
- CONFIG CMFA CFA EXP Sematinya Sampai Juni V3.yaml (SFILEDocument12 pagesCONFIG CMFA CFA EXP Sematinya Sampai Juni V3.yaml (SFILEdinar PNo ratings yet
- Sensors: Sensor and Sensor Fusion Technology in Autonomous Vehicles: A ReviewDocument37 pagesSensors: Sensor and Sensor Fusion Technology in Autonomous Vehicles: A ReviewRaka PratindyNo ratings yet
- Opera Room Reservation System 2623003Document3 pagesOpera Room Reservation System 2623003Vijaya KumarNo ratings yet
- AMIGA - Ball Game, The InstructionsDocument2 pagesAMIGA - Ball Game, The InstructionsjajagaborNo ratings yet
- Thesis Parts in TagalogDocument4 pagesThesis Parts in Tagaloggbwaj17e100% (2)
- Easy Open Data From Open Data To SustainainabilityDocument143 pagesEasy Open Data From Open Data To SustainainabilityThalita DalbeloNo ratings yet
- Fortios v6.0.10 Release NotesDocument31 pagesFortios v6.0.10 Release NotesCopsicleNo ratings yet
- Faculty of Computer Science and Information TechnologyDocument4 pagesFaculty of Computer Science and Information TechnologyNurafiqah Sherly Binti ZainiNo ratings yet
- Use Case Diagram: LoginDocument5 pagesUse Case Diagram: LoginThe MindNo ratings yet
- Rollercoin CalculoDocument2 pagesRollercoin CalculoGiovanny A. NavasNo ratings yet
- Rationale Wits SmartDocument5 pagesRationale Wits SmartdavidNo ratings yet
- Gartner Security Na Brochure 2020Document8 pagesGartner Security Na Brochure 2020ramstein86No ratings yet
- Checkout Confirm Foot LockerDocument1 pageCheckout Confirm Foot LockerSylvester MoonNo ratings yet
- FoP Ch03 FunctionsDocument44 pagesFoP Ch03 FunctionsQuang Sang NguyễnNo ratings yet
- Knuckle Joint Drafting Drawing PDF Download - Google SearchDocument6 pagesKnuckle Joint Drafting Drawing PDF Download - Google SearchRAHUL KUMAR CHAURASIA100% (1)
- Data Structures: Unit III - Part 4 Bca, NGMCDocument10 pagesData Structures: Unit III - Part 4 Bca, NGMCSanthosh kumar KNo ratings yet
- Lecture 11 StructuresDocument37 pagesLecture 11 StructuresShiffa AzaharNo ratings yet