Download as pdf or txt
You might also like
- 01 Nazarov - On Application of Parametric Method For Design ofDocument11 pages01 Nazarov - On Application of Parametric Method For Design ofsowole olantunNo ratings yet
- WICKED LibrettoDocument49 pagesWICKED LibrettoCatalina Moreno100% (2)
- YCMOU B.Com SyllabusDocument20 pagesYCMOU B.Com SyllabusPruthviraj PatilNo ratings yet
- Squat Effects: A Practical Guide To Its Nature, Measurement and PredictionDocument9 pagesSquat Effects: A Practical Guide To Its Nature, Measurement and Predictionwaleed yehiaNo ratings yet
- Waterjets Vs PropellersDocument1 pageWaterjets Vs Propellersaeromexpower2009No ratings yet
- Warehouse AnalyticsDocument62 pagesWarehouse AnalyticsMary Williams100% (1)
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- Planing Craft: The Editor Dr. Daniel SavitskyDocument29 pagesPlaning Craft: The Editor Dr. Daniel SavitskyAkbar Adi WijayaNo ratings yet
- Auto Power ManualDocument97 pagesAuto Power ManualAngel100% (1)
- Design of Propeller Tunnels PDFDocument14 pagesDesign of Propeller Tunnels PDFldigasNo ratings yet
- SurfaceDocument10 pagesSurfaceManoj Kumar BisoyiNo ratings yet
- User's Manual: Release 3.0Document126 pagesUser's Manual: Release 3.0eumesmo46No ratings yet
- Prediction of High-Speed Planing Hull Resistance and Running AttitudeDocument92 pagesPrediction of High-Speed Planing Hull Resistance and Running AttitudeRangga ZNo ratings yet
- Senior Design - Spring 14 FinalDocument148 pagesSenior Design - Spring 14 FinalMatthew WeltonNo ratings yet
- Hydromechanica 3Document324 pagesHydromechanica 3Enrique J. Carrillo GómezNo ratings yet
- Evaluation of Resistance Prediction For High-Speed Round Bilge Hull Forms - 2011Document10 pagesEvaluation of Resistance Prediction For High-Speed Round Bilge Hull Forms - 2011Maurizio BernasconiNo ratings yet
- Motor Yacht Hull Form DesignDocument16 pagesMotor Yacht Hull Form Designale barbNo ratings yet
- Installation Marine Propulsion Diesel Engines D5-D16 Series 47704151Document258 pagesInstallation Marine Propulsion Diesel Engines D5-D16 Series 47704151cuauhtemocNo ratings yet
- 05 High Speed Hulls & Propulsors PDFDocument87 pages05 High Speed Hulls & Propulsors PDFChocolatebuonNo ratings yet
- WestlawnMasthead07 Sept08Document22 pagesWestlawnMasthead07 Sept08naufragatoNo ratings yet
- Hiper2010 MelbourneDocument310 pagesHiper2010 MelbournemaciuluNo ratings yet
- Vanbenthuysen Adrian Nordhavn76Document53 pagesVanbenthuysen Adrian Nordhavn76api-299532402No ratings yet
- CPV757Document1 pageCPV757Richard Leonel Vasquez MezaNo ratings yet
- Estimativas CatamaranDocument145 pagesEstimativas CatamaranAndersonNo ratings yet
- MAXSURFDocument4 pagesMAXSURFMikhail Roy Dela CruzNo ratings yet
- Power Calculation of A Planing HullDocument6 pagesPower Calculation of A Planing HullNadia Quayyum100% (1)
- U-Botten RevDocument10 pagesU-Botten RevJunaid JavaidNo ratings yet
- Characteristics of PropellerDocument46 pagesCharacteristics of PropellerBishop TariganNo ratings yet
- Bollard Pull NavCad MN Dec15Document2 pagesBollard Pull NavCad MN Dec15theleepiper8830100% (1)
- Paul Kamen: Naval Architect, P.EDocument4 pagesPaul Kamen: Naval Architect, P.EpothirajkalyanNo ratings yet
- Rib Magazine - Issue 101Document2 pagesRib Magazine - Issue 101oysterhouseNo ratings yet
- Damen Stan Tender: General Deck Lay-OutDocument2 pagesDamen Stan Tender: General Deck Lay-Outvov1302No ratings yet
- Preliminary Jet Size SelectionDocument3 pagesPreliminary Jet Size SelectionhaujesNo ratings yet
- Comparison of High Speed CraftsDocument4 pagesComparison of High Speed CraftsAnonymous e3ceN15100% (1)
- Advanced Topics in Stepped Hull Design - Robert Kaidy - IBEX Session104 - 1Document37 pagesAdvanced Topics in Stepped Hull Design - Robert Kaidy - IBEX Session104 - 1Michael McDonald100% (1)
- Propeller Basics - Propeller Geometry - Propeller SeriesDocument29 pagesPropeller Basics - Propeller Geometry - Propeller SeriesHerbetNo ratings yet
- Maestro PDFDocument160 pagesMaestro PDFGiacomo Pison100% (1)
- Planing Hull Model Tests For CFD ValidationDocument10 pagesPlaning Hull Model Tests For CFD Validationfez960No ratings yet
- Planing Vessels 1Document13 pagesPlaning Vessels 1Ahmet GelisliNo ratings yet
- CLT SMM2014 PresentationDocument29 pagesCLT SMM2014 PresentationEmine DağNo ratings yet
- Hydrodynamic of High Speed Vessels - LecturesDocument49 pagesHydrodynamic of High Speed Vessels - LecturescupidkhhNo ratings yet
- Hydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiDocument9 pagesHydrodynamic Analysis Techniques For High-Speed Planing Hulls-Reza YousefiFernandocf90No ratings yet
- Arneson Surface Drives CatalogueDocument12 pagesArneson Surface Drives CatalogueWoodsy12No ratings yet
- Matching Propulsion Engine With PropulsorDocument9 pagesMatching Propulsion Engine With PropulsorAnonymous gxAd4liNo ratings yet
- Savitsky - On The Subject of High Speed MonohullsDocument44 pagesSavitsky - On The Subject of High Speed MonohullssearchileNo ratings yet
- Luciano Federico L Brochure PDFDocument4 pagesLuciano Federico L Brochure PDFbft23No ratings yet
- An Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFDocument63 pagesAn Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFGhalih Rasyid Prayogo100% (1)
- NPS SDDDocument246 pagesNPS SDDbring it onNo ratings yet
- Butler - The Surface Effect ShipDocument54 pagesButler - The Surface Effect ShipJovic IlicNo ratings yet
- HydroComp NavCad For Wind Farm Service VesselsDocument3 pagesHydroComp NavCad For Wind Farm Service VesselsJacqueline BenavidesNo ratings yet
- BMTNG Patrol BoatDocument2 pagesBMTNG Patrol BoatNico BossiNo ratings yet
- Damage Stability StandardsDocument10 pagesDamage Stability StandardsianNo ratings yet
- Performance Predictions For Planing Craft in A SeawayDocument79 pagesPerformance Predictions For Planing Craft in A Seawayreza84100% (2)
- Classification Society - WikipediaDocument6 pagesClassification Society - WikipediaFlavio MoraesNo ratings yet
- Forefoot Design For Planing HullsDocument17 pagesForefoot Design For Planing Hullsadslfasdf100% (1)
- 3559Document24 pages3559ldigasNo ratings yet
- PHD Wicaksono 2019 PDFDocument145 pagesPHD Wicaksono 2019 PDFEric KulbiejNo ratings yet
- Design and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004Document11 pagesDesign and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004haujesNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- $tsu. (:'T ": (: Uu TorDocument23 pages$tsu. (:'T ": (: Uu TorhaujesNo ratings yet
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- Wave Impact Reduction of Planing BoatsDocument14 pagesWave Impact Reduction of Planing BoatshaujesNo ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- AsdmechanicaldesignDocument5 pagesAsdmechanicaldesignhaujesNo ratings yet
- Estimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReportDocument2 pagesEstimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReporthaujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- How To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofDocument4 pagesHow To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofhaujes0% (1)
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- NASP Origin and Cause, Appraisals On Boat Losses - Davis 2003Document21 pagesNASP Origin and Cause, Appraisals On Boat Losses - Davis 2003haujesNo ratings yet
- Preliminary Jet Size SelectionDocument3 pagesPreliminary Jet Size SelectionhaujesNo ratings yet
- Ultrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZDocument2 pagesUltrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZhaujesNo ratings yet
- A10 (2D) SPRAWDZIAN U. 5-6 (Ox. Sol. Int.) Dn. 29.04.2021 Mateusz KoziarskiDocument3 pagesA10 (2D) SPRAWDZIAN U. 5-6 (Ox. Sol. Int.) Dn. 29.04.2021 Mateusz KoziarskiMateusz KoziarskiNo ratings yet
- Mrunal Social Reformers - Ambedkar, Ayyankali, ChinnaswamiDocument2 pagesMrunal Social Reformers - Ambedkar, Ayyankali, ChinnaswamiAmit KankarwalNo ratings yet
- Tally Exrercise 2: Date Description AmountDocument1 pageTally Exrercise 2: Date Description AmountExcel WaysNo ratings yet
- CFD - Workshop BrochureDocument2 pagesCFD - Workshop Brochurehari1405No ratings yet
- Trouble Shooting ElectricalDocument1 pageTrouble Shooting ElectricalHemraj Singh RautelaNo ratings yet
- TC15M 65M Manual PDFDocument15 pagesTC15M 65M Manual PDFReciclando ChatarraNo ratings yet
- China Freezing Air Conditioning Equipment Mfg. Industry Profile Cic3573Document8 pagesChina Freezing Air Conditioning Equipment Mfg. Industry Profile Cic3573AllChinaReports.comNo ratings yet
- Needle Stick and Sharp Injuries and Associated Factors Among Nurses Workingin Jimma University Specialized Hospital South West Ethiopia 2167 1168 1000291Document8 pagesNeedle Stick and Sharp Injuries and Associated Factors Among Nurses Workingin Jimma University Specialized Hospital South West Ethiopia 2167 1168 1000291MrLarry DolorNo ratings yet
- Qanda 2023 CommDocument451 pagesQanda 2023 CommJoe Soliman100% (2)
- Chapter 8 - Orientation, TrainingDocument31 pagesChapter 8 - Orientation, TrainingSadakalo Shopnoo100% (2)
- Control Loops 2Document22 pagesControl Loops 2Muntadher AbbasNo ratings yet
- Is It Worth Dropping One More Year For GATE - QuoraDocument6 pagesIs It Worth Dropping One More Year For GATE - QuoraRaJu SinGhNo ratings yet
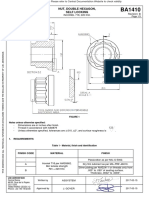
- Nut, Double Hexagon, Self Locking: Page 1/3Document3 pagesNut, Double Hexagon, Self Locking: Page 1/3Renato WatanabeNo ratings yet
- Middlesex v. QuestDocument12 pagesMiddlesex v. QuestJustin OkunNo ratings yet
- JWT Spring Boot ExampleDocument9 pagesJWT Spring Boot Exampleaaaa100% (1)
- Royal Prince Dasma Electrical Plan 1Document2 pagesRoyal Prince Dasma Electrical Plan 1Ryan Anthony UmaliNo ratings yet
- Beginner Guide To VIIRS Imagery DataDocument33 pagesBeginner Guide To VIIRS Imagery Datavnh01No ratings yet
- SCB N KingfiherDocument7 pagesSCB N KingfiherSergel Capsule100% (1)
- Solved Pablo Is Studying Financial Statements To Decide Which CompaniesDocument1 pageSolved Pablo Is Studying Financial Statements To Decide Which CompaniesAnbu jaromiaNo ratings yet
- HKOH SNDL Int ReqDocument2 pagesHKOH SNDL Int ReqMuhammad AsfandyarNo ratings yet
- Chapter 1 AnnexeDocument17 pagesChapter 1 AnnexeWafaNo ratings yet
- Kabale University Students HandbookDocument20 pagesKabale University Students Handbookjesseokiror21No ratings yet
- Foundation Lecture (Abdulhafiz)Document4 pagesFoundation Lecture (Abdulhafiz)desigandNo ratings yet
- Catalog STV 25k Series Surge Protective Devices Solahd en Us 163760Document2 pagesCatalog STV 25k Series Surge Protective Devices Solahd en Us 163760Jorge Dario Jarrin VivarNo ratings yet
- sjp810m Manual BookDocument12 pagessjp810m Manual BookMegNo ratings yet
- Equator PrinciplesDocument10 pagesEquator Principlesemma monica100% (2)
- Edu TrekDocument3 pagesEdu TrekMrs. LibbyNo ratings yet