Download as pdf or txt
You might also like
- Floor Function - Titu Andreescu, Dorin Andrica - MR 2006 PDFDocument5 pagesFloor Function - Titu Andreescu, Dorin Andrica - MR 2006 PDFMihnea0% (1)
- Cryptography, Winter Term 16/17: Sample Solution To Assignment 2Document5 pagesCryptography, Winter Term 16/17: Sample Solution To Assignment 2Safenat SafenatNo ratings yet
- Conditional Variance Conditional Expectation Iterated Expectations Independent Random VariablesDocument1 pageConditional Variance Conditional Expectation Iterated Expectations Independent Random VariablesKenosNo ratings yet
- CSC 236 A1 2018 WinterDocument5 pagesCSC 236 A1 2018 WinterSteven SuccarNo ratings yet
- Chapter 3: Dual Spaces and The Hahn-Banach Theo-RemDocument14 pagesChapter 3: Dual Spaces and The Hahn-Banach Theo-RemDanish HassanNo ratings yet
- Digital Signal Processing: B, Where (A, B) Can Be (Or X (T)Document6 pagesDigital Signal Processing: B, Where (A, B) Can Be (Or X (T)Mrinal MitraNo ratings yet
- EE120: S S: University of California, Berkeley Department of EECS (Spring 2021)Document5 pagesEE120: S S: University of California, Berkeley Department of EECS (Spring 2021)David Matthew Kurniawan BEngNo ratings yet
- DT SignalDocument12 pagesDT SignalPrasad ShindeNo ratings yet
- Fourier SeriesDocument2 pagesFourier SeriesSauvik Chatterjee100% (1)
- Assignment 5: IC260 - IIT MandiDocument3 pagesAssignment 5: IC260 - IIT MandiSourav SamantNo ratings yet
- 1 Poisson Manifolds: Classical Mechanics, Lecture 9Document3 pages1 Poisson Manifolds: Classical Mechanics, Lecture 9bgiangre8372No ratings yet
- Final SolDocument21 pagesFinal SolChuan HeNo ratings yet
- 4.1.1 Sampling The Fourier TransformDocument22 pages4.1.1 Sampling The Fourier TransformAhmed HussainNo ratings yet
- Demonstration of Goldbach's ConjectureDocument6 pagesDemonstration of Goldbach's ConjectureIdriss Olivier BadoNo ratings yet
- Advanced Signals & Systems Questions and Answers - SanfoundryDocument11 pagesAdvanced Signals & Systems Questions and Answers - SanfoundrykshambelmekuyeNo ratings yet
- S. ThangaveluDocument53 pagesS. ThangaveluHusnain Ali wajidNo ratings yet
- Lectures On Fourier Analysis by S.ThangaveluDocument53 pagesLectures On Fourier Analysis by S.ThangaveluChowdaiahNo ratings yet
- Assignment 3: Digital Signal Processing (ELE222T) DTFT and DFT Dr. Priyanka Kokil QuestionsDocument4 pagesAssignment 3: Digital Signal Processing (ELE222T) DTFT and DFT Dr. Priyanka Kokil QuestionsAswathy ManojNo ratings yet
- 08 Plasticity 03 YieldCriteriaDocument18 pages08 Plasticity 03 YieldCriteriaHarishNo ratings yet
- Assignment Template UOMDocument19 pagesAssignment Template UOMAarav 127No ratings yet
- K N +K K KDocument5 pagesK N +K K Kvanaj123No ratings yet
- Paper 69Document5 pagesPaper 69KaustubhNo ratings yet
- ch7 FollandDocument3 pagesch7 FollandHONGBO WANGNo ratings yet
- JMSAA 80711 Li Zhenqi and Jin Miaomiao 547-561Document15 pagesJMSAA 80711 Li Zhenqi and Jin Miaomiao 547-561mehmoodurrehman1993No ratings yet
- Home Sol 5Document2 pagesHome Sol 5Hamdi SeverNo ratings yet
- Calculus of Finite Differences: Andreas KlappeneckerDocument30 pagesCalculus of Finite Differences: Andreas KlappeneckerSouvik RoyNo ratings yet
- 5 L L EC533: Digital Signal Processing: DFT and FFTDocument20 pages5 L L EC533: Digital Signal Processing: DFT and FFTDalia Abou El MaatyNo ratings yet
- Homework # 6: Name: MAT201A University of California, Davis Fall 2017Document2 pagesHomework # 6: Name: MAT201A University of California, Davis Fall 2017ant314159265No ratings yet
- Disc Math 3Document18 pagesDisc Math 3akhodaivandyNo ratings yet
- Assignment Template UOMDocument10 pagesAssignment Template UOMAarav 127No ratings yet
- CSE 5311 Homework 1 Solution: Problem 2.2-1Document8 pagesCSE 5311 Homework 1 Solution: Problem 2.2-1tilahun0% (1)
- Assign1 SolutionsDocument6 pagesAssign1 SolutionsMarwan RamounNo ratings yet
- Exercise2 SolDocument7 pagesExercise2 SolKhalil El LejriNo ratings yet
- Sample Solutions For Exercise Sheet 3Document5 pagesSample Solutions For Exercise Sheet 3Jair CarneiroNo ratings yet
- Digital Signal Processing The Discrete Fourier Series of Periodic SequencesDocument9 pagesDigital Signal Processing The Discrete Fourier Series of Periodic SequencesdrashokyvuceNo ratings yet
- Fourier Series and Periodicity: Cos Sin 2Document8 pagesFourier Series and Periodicity: Cos Sin 2Jonathan paulino castilloNo ratings yet
- Cryptography, Winter Term 16/17: Sample Solution To Assignment 4Document3 pagesCryptography, Winter Term 16/17: Sample Solution To Assignment 4Safenat SafenatNo ratings yet
- Linear Feedback Shift RegistersDocument22 pagesLinear Feedback Shift RegistersvamshiNo ratings yet
- Notes, 5 (B) : ECE 606 QuicksortDocument5 pagesNotes, 5 (B) : ECE 606 QuicksortChan DavidNo ratings yet
- The P-Adic Valuation of K-Central Binomial CoefficientsDocument20 pagesThe P-Adic Valuation of K-Central Binomial CoefficientsPinto SjafriNo ratings yet
- Problem4 07Document3 pagesProblem4 07Fábio TakahashiNo ratings yet
- Sheldon Ross-438-449Document12 pagesSheldon Ross-438-449Mila ApriliyantiNo ratings yet
- Solution To The Problem Set 6: Ehsan Karamad March 12, 2013Document5 pagesSolution To The Problem Set 6: Ehsan Karamad March 12, 2013RAPETI SAI KUMAR (N160490)No ratings yet
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Mathematical Foundation: CSE 6331 Algorithms Steve LaiDocument23 pagesMathematical Foundation: CSE 6331 Algorithms Steve Laiarup sarkerNo ratings yet
- O111Document5 pagesO111nbcvlogger1001No ratings yet
- Report - Project: Shell Model 2019Document5 pagesReport - Project: Shell Model 2019Sugan NallaNo ratings yet
- Solution of Assignment 3Document3 pagesSolution of Assignment 3ANIRUDDHA PAULNo ratings yet
- Lec 24Document8 pagesLec 24Angelo OppioNo ratings yet
- Dma 3 NotesDocument9 pagesDma 3 NotesSimon AndersenNo ratings yet
- 5-The Diffusion Equation - BDocument26 pages5-The Diffusion Equation - Balagarg137691No ratings yet
- Fourier Series of Periodic Discrete-Time SignalsDocument36 pagesFourier Series of Periodic Discrete-Time SignalsBruce MarshallNo ratings yet
- CSCI 3110 Assignment 6 Solutions: n ≈ n nlogn=O n n − ϵ where ϵ = (log − logDocument4 pagesCSCI 3110 Assignment 6 Solutions: n ≈ n nlogn=O n n − ϵ where ϵ = (log − logRicardo BrunoNo ratings yet
- Solutions To The 78th William Lowell Putnam Mathematical Competition Saturday, December 2, 2017Document9 pagesSolutions To The 78th William Lowell Putnam Mathematical Competition Saturday, December 2, 2017ahmet çolakNo ratings yet
- DSP3Document34 pagesDSP3Juju salehNo ratings yet
- Handout 3: MA 202 - Probability and StatisticsDocument12 pagesHandout 3: MA 202 - Probability and StatisticsSharath ReddyNo ratings yet
- Digital Signal Processing: Basics Course Summary, Exercises and Practical WorkDocument62 pagesDigital Signal Processing: Basics Course Summary, Exercises and Practical WorkDjamel TegNo ratings yet
- Mathematics: On The Characteristic Polynomial of The Generalized K-Distance Tribonacci SequencesDocument8 pagesMathematics: On The Characteristic Polynomial of The Generalized K-Distance Tribonacci SequencesMadeehah AatifNo ratings yet
- Riemann IntegrationDocument10 pagesRiemann Integrationvaibhav chaurasiyaNo ratings yet
- The Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Document6 pagesThe Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Jorge OñateNo ratings yet
- Topic 5-Abstract Data Structures - Revision - NotesDocument12 pagesTopic 5-Abstract Data Structures - Revision - NotesN100% (1)
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocument27 pagesDevelopment of Empirical Models From Process Data: - An Attractive AlternativeSudhakar KumarNo ratings yet
- Coding Interview 6Document677 pagesCoding Interview 6akg299No ratings yet
- DSP FFT - Codigo en MatlabDocument2 pagesDSP FFT - Codigo en MatlabmickvillacisNo ratings yet
- SJF Scheduling - SRTF - CPU Scheduling - Gate VidyalayDocument11 pagesSJF Scheduling - SRTF - CPU Scheduling - Gate VidyalaySuman PoudelNo ratings yet
- NMC Handout - 2Document6 pagesNMC Handout - 2NIKHIL NIKHINo ratings yet
- Traversal AlgorithmsDocument18 pagesTraversal AlgorithmsactualruthwikNo ratings yet
- Blacktown Boys 2023 2U Trials & SolutionsDocument24 pagesBlacktown Boys 2023 2U Trials & SolutionsHomework HelperNo ratings yet
- Chapter 5 Data Security (DR - Atef)Document40 pagesChapter 5 Data Security (DR - Atef)JonathanHindiNo ratings yet
- Runge Kutta MethodsDocument10 pagesRunge Kutta MethodsQamar ZahoorNo ratings yet
- ProgFun-Outline - OBE-F2023Document5 pagesProgFun-Outline - OBE-F2023Shoaib MushtaqNo ratings yet
- Advanced Military CryptographyDocument115 pagesAdvanced Military CryptographygerrooNo ratings yet
- Modeling - and - Simulation - in - Science - Proceedings - O... - (Part - C - Methods - and - Techniques) PDFDocument12 pagesModeling - and - Simulation - in - Science - Proceedings - O... - (Part - C - Methods - and - Techniques) PDFmineNo ratings yet
- Algorithms As A TechnologyDocument4 pagesAlgorithms As A TechnologyJosé M. RamírezNo ratings yet
- MIT18 01SCF10 Ses76dDocument2 pagesMIT18 01SCF10 Ses76dDestructive InterferenceNo ratings yet
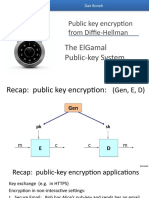
- Public Key Encryption From Diffie-HellmanDocument41 pagesPublic Key Encryption From Diffie-HellmanJailson F. LeiteNo ratings yet
- Lab-8 BPSK Modulation and DemodulationDocument11 pagesLab-8 BPSK Modulation and DemodulationNima Vahidian BaraniNo ratings yet
- Hashing: Data Structures and Algorithms in JavaDocument78 pagesHashing: Data Structures and Algorithms in JavaNguyễn Tuấn KhanhNo ratings yet
- ErrataDocument5 pagesErrataPeter ZhouNo ratings yet
- What Is The Easiest Definition of 'Entropy' - QuoraDocument19 pagesWhat Is The Easiest Definition of 'Entropy' - QuoraMark J. Burton IINo ratings yet
- (2019) An Introduction To Functional Programming With GoDocument255 pages(2019) An Introduction To Functional Programming With GofeyeleanorNo ratings yet
- ENPM667: Control of Robotic Systems Final Project: University of Maryland, College ParkDocument18 pagesENPM667: Control of Robotic Systems Final Project: University of Maryland, College ParkSandeep Kota100% (1)
- A Parameterized Complexity TutorialDocument19 pagesA Parameterized Complexity TutorialbobysiswantoNo ratings yet
- 21ED602 Optimization Techniques in Engineering: Class Notes (Internal Circulation)Document7 pages21ED602 Optimization Techniques in Engineering: Class Notes (Internal Circulation)Sudipta MaityNo ratings yet
- Algorithm AnalysisDocument66 pagesAlgorithm AnalysisAbdi NegassaNo ratings yet
- Oving-The-Beginners-Pid-Introduction/ Improving The Beginner's PID - IntroductionDocument2 pagesOving-The-Beginners-Pid-Introduction/ Improving The Beginner's PID - IntroductionmathsantosNo ratings yet
- Mean Shift ClusterDocument10 pagesMean Shift ClusterSoumyajit JagdevNo ratings yet
- 097 3Document8 pages097 3Ashish BeckhamNo ratings yet
- APM2613 - 202 - 0 - 2022 (A02 Feedback)Document21 pagesAPM2613 - 202 - 0 - 2022 (A02 Feedback)Darrel van OnselenNo ratings yet