Download as pdf or txt
You might also like
- 011 Chapter 9Document10 pages011 Chapter 9xiaomiNo ratings yet
- Hybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationDocument10 pagesHybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationAbolfazl AbbasiyanNo ratings yet
- Moment Generating Function of Current Records Based On Generalized Exponential Distribution With Some Recurrence RelationsDocument15 pagesMoment Generating Function of Current Records Based On Generalized Exponential Distribution With Some Recurrence Relationsmohrosyid.22053No ratings yet
- Weighted Power LindleyDocument13 pagesWeighted Power LindleyvidyayNo ratings yet
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- TSSD 2009Document16 pagesTSSD 2009MongiBESBESNo ratings yet
- Extraction of Coupling Matrix of Generalized Chebyshev Filter Based On Matlab, Pei LiDocument4 pagesExtraction of Coupling Matrix of Generalized Chebyshev Filter Based On Matlab, Pei LiDenis CarlosNo ratings yet
- Dupiere Discrete ModelDocument14 pagesDupiere Discrete Modelabhiu1991No ratings yet
- 10 - Edge Adaptive Prediction For Lossless ImageDocument8 pages10 - Edge Adaptive Prediction For Lossless ImageAndrada CirneanuNo ratings yet
- Ultrasonic Guided Wave Tomography For Damage Detection in Harsh EnvironmentDocument9 pagesUltrasonic Guided Wave Tomography For Damage Detection in Harsh EnvironmentHajar ChouiyakhNo ratings yet
- Estimation Inverse Weibull Random CensoringDocument28 pagesEstimation Inverse Weibull Random CensoringSatyaNo ratings yet
- On A Nonstationary Discrete Time Innite Horizon Growth Model With UncertaintyDocument10 pagesOn A Nonstationary Discrete Time Innite Horizon Growth Model With UncertaintypostscriptNo ratings yet
- Bivariate Extreme Statistics, Ii: Authors: Miguel de CarvalhoDocument25 pagesBivariate Extreme Statistics, Ii: Authors: Miguel de CarvalhoDamon SNo ratings yet
- Examples Comparing Importance Sampling and The MetDocument26 pagesExamples Comparing Importance Sampling and The MetRafalel JupioNo ratings yet
- Existence of Multiple Limit Cycles On A Predator-Prey With Generalized Nonmonotonic Functional ResponseDocument12 pagesExistence of Multiple Limit Cycles On A Predator-Prey With Generalized Nonmonotonic Functional ResponseEmilioTSNo ratings yet
- Tests of The Efficient Markets HypothesisDocument22 pagesTests of The Efficient Markets HypothesispostscriptNo ratings yet
- Maria Kulikov A 2015Document6 pagesMaria Kulikov A 2015RAJNI KUMARINo ratings yet
- Data Assimilation Tutorial On The Kalman Filter: A. Fowler, University of Reading Data Assimilation Research CentreDocument14 pagesData Assimilation Tutorial On The Kalman Filter: A. Fowler, University of Reading Data Assimilation Research CentreA MaqsoodNo ratings yet
- Joint GP 26-2-2022 NewformatDocument14 pagesJoint GP 26-2-2022 Newformatehab aliNo ratings yet
- 15 Aos1423Document37 pages15 Aos1423sherlockholmes108No ratings yet
- 08 Bej137Document39 pages08 Bej137christoumpingfotsoNo ratings yet
- Particle Filter ArticleDocument18 pagesParticle Filter ArticleAndrés CeverisaeNo ratings yet
- Photon CountingDocument18 pagesPhoton CountingLillyOpenMindNo ratings yet
- Lab3 7Document5 pagesLab3 7sendkushNo ratings yet
- Moments of Order Statistics of The - 1Document12 pagesMoments of Order Statistics of The - 1Paola AndreaNo ratings yet
- Pca-phân tích thành phần chínhDocument30 pagesPca-phân tích thành phần chínhChemTuongViNo ratings yet
- 2012-Estim. of The Exponential Distr Based On Multiply Progr Type IIDocument8 pages2012-Estim. of The Exponential Distr Based On Multiply Progr Type IIsssNo ratings yet
- Wen-Jing ZHANG, Li-Mao ZHANG, Xian-Guo WU and Yang LIUDocument6 pagesWen-Jing ZHANG, Li-Mao ZHANG, Xian-Guo WU and Yang LIUShafie ZubierNo ratings yet
- Chap 4Document21 pagesChap 4ehsan_civil_62No ratings yet
- Aos 2067Document23 pagesAos 2067Karen PessoaNo ratings yet
- Computer Control of ProcessDocument29 pagesComputer Control of ProcessArjun NandyNo ratings yet
- MFDFA Cervical Cancer ColposDocument6 pagesMFDFA Cervical Cancer ColposJesser DridiNo ratings yet
- Aashikpelokhai and MomoduDocument7 pagesAashikpelokhai and MomoduSandaMohdNo ratings yet
- Rotinas Fortran L MomentsDocument39 pagesRotinas Fortran L MomentseduardatokudaNo ratings yet
- Anderson 2003Document9 pagesAnderson 2003Why BotherNo ratings yet
- A Unified Approach For Generalized Minimum Variance Controller For Linear Time-Varying SystemsDocument10 pagesA Unified Approach For Generalized Minimum Variance Controller For Linear Time-Varying SystemsTJPRC PublicationsNo ratings yet
- Wang 2012Document15 pagesWang 2012Wang RickyNo ratings yet
- ApsoDocument14 pagesApsolaptop112299No ratings yet
- Classical MechanicsDocument6 pagesClassical MechanicsSebastian Soto PerdomoNo ratings yet
- 1 s2.0 S2211379723000876 MainDocument29 pages1 s2.0 S2211379723000876 MainSajjad AliNo ratings yet
- L23 - Postulates of QMDocument24 pagesL23 - Postulates of QMdomagix470No ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument23 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsmelieneideaNo ratings yet
- Galerkin-Wavelet Methods For Two-Point Boundary Value ProblemsDocument22 pagesGalerkin-Wavelet Methods For Two-Point Boundary Value ProblemsAlloula AlaeNo ratings yet
- Improved Estimators of Tail Index and Extreme Quantiles Under Dependence SerialsDocument21 pagesImproved Estimators of Tail Index and Extreme Quantiles Under Dependence SerialsHugo BrangoNo ratings yet
- Nonlinear Control of The Gyroscopic PendulumDocument23 pagesNonlinear Control of The Gyroscopic Pendulumxuanvunguyen8xNo ratings yet
- Hankel Singular ValuesDocument26 pagesHankel Singular ValuesFrancisco HurtadoNo ratings yet
- A New Generalization of Lindley Distribution: Department of Mathematical StatisticsDocument12 pagesA New Generalization of Lindley Distribution: Department of Mathematical Statisticswill bNo ratings yet
- EstimationDocument16 pagesEstimationfatihaNo ratings yet
- SLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuoDocument2 pagesSLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuopaperopenaccessNo ratings yet
- Local Linear Conditional Cumulative Distribution Function With Mixing DataDocument19 pagesLocal Linear Conditional Cumulative Distribution Function With Mixing Dataالشمس اشرقتNo ratings yet
- About The Bounds of The Modal Frequency ResponseDocument4 pagesAbout The Bounds of The Modal Frequency ResponsetikelNo ratings yet
- First Order Optimization Algorithms Via Discretization of Finite Time Convergent FlowsDocument24 pagesFirst Order Optimization Algorithms Via Discretization of Finite Time Convergent FlowsAman JalanNo ratings yet
- The Marginal Value of Adaptive Gradient Methods in Machine LearningDocument11 pagesThe Marginal Value of Adaptive Gradient Methods in Machine LearningDavidNo ratings yet
- 10 1 1 55 3308Document12 pages10 1 1 55 3308Yohana SaraswatiNo ratings yet
- Journal of Statistical Software: SPECIES: An R Package For Species Richness EstimationDocument15 pagesJournal of Statistical Software: SPECIES: An R Package For Species Richness EstimationBenjamin CorvalanNo ratings yet
- 103 April 2000 QuestionDocument7 pages103 April 2000 QuestionKanika KanodiaNo ratings yet
- 1 Ijmcaraug20181Document6 pages1 Ijmcaraug20181TJPRC PublicationsNo ratings yet
- Challenge Illustion Clear Dynamics ClearDocument14 pagesChallenge Illustion Clear Dynamics ClearssfofoNo ratings yet
- Fast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaDocument7 pagesFast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaJagan J Jagan JNo ratings yet
- Clustering Financial Time Series With Variance Ratio StatisticsDocument28 pagesClustering Financial Time Series With Variance Ratio StatisticsJorge Ivan Zapata RiverosNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Inference On Weibull Parameters Under A Balanced Two Sample Type-II Progressive Censoring SchemeDocument27 pagesInference On Weibull Parameters Under A Balanced Two Sample Type-II Progressive Censoring Schemeehab aliNo ratings yet
- 16266-Other-58002-1-18-20210408 (1) EOWP PalagrismDocument26 pages16266-Other-58002-1-18-20210408 (1) EOWP Palagrismehab aliNo ratings yet
- Bayesian Optimal Life-Testing Plan Under The Balanced Two Sample type-II Progressive Censoring SchemeDocument13 pagesBayesian Optimal Life-Testing Plan Under The Balanced Two Sample type-II Progressive Censoring Schemeehab aliNo ratings yet
- Joint GP 26-2-2022 NewformatDocument14 pagesJoint GP 26-2-2022 Newformatehab aliNo ratings yet
- AMCAT Test Paper 1 Only QuesDocument18 pagesAMCAT Test Paper 1 Only Quesarnold_samuel3848No ratings yet
- Restrictions To Perform DML Operations On ViewsDocument3 pagesRestrictions To Perform DML Operations On ViewsONo ratings yet
- Catalogo - NM SPERONIDocument67 pagesCatalogo - NM SPERONIVenk KisaragiNo ratings yet
- Lab in Psychology Psy 310Document3 pagesLab in Psychology Psy 310mitalitanna2802No ratings yet
- The Synthesis of Cinnamoyl Chloride: Tadao MatsumotoDocument5 pagesThe Synthesis of Cinnamoyl Chloride: Tadao Matsumotoshenn0No ratings yet
- Kami Export - 4.2 Notebook - pdf4.13Document5 pagesKami Export - 4.2 Notebook - pdf4.13Richard WhittNo ratings yet
- Fake Product Review FinalDocument30 pagesFake Product Review Final3201313No ratings yet
- Pega Doument 1690469041Document138 pagesPega Doument 1690469041johnchandankumarNo ratings yet
- Complex Numbers and Polar Form: ImaginaryDocument4 pagesComplex Numbers and Polar Form: ImaginaryFumira MisataNo ratings yet
- Math SymbolsDocument22 pagesMath SymbolsHoang GiangNo ratings yet
- Column HP10 To Base Plate Connection Report PDFDocument7 pagesColumn HP10 To Base Plate Connection Report PDFAhmed AlmayaliNo ratings yet
- Cement PurityDocument75 pagesCement PuritySaragadam DilsriNo ratings yet
- Cannon Ball Review With Exercises Part 2 PDFDocument30 pagesCannon Ball Review With Exercises Part 2 PDFLayNo ratings yet
- Data Modeling For MTUDocument61 pagesData Modeling For MTUbeastionizNo ratings yet
- Rexroht PumpDocument45 pagesRexroht PumpmanualdeutsNo ratings yet
- Chm271 - Tutorial 5 - Chemical KineticsDocument6 pagesChm271 - Tutorial 5 - Chemical Kineticsfiefy zmrNo ratings yet
- Turret LatheDocument82 pagesTurret LatheReyven ReconNo ratings yet
- PY-1 (A) Write A Program To Calculate The Factorial of The Given Number Using For LoopDocument8 pagesPY-1 (A) Write A Program To Calculate The Factorial of The Given Number Using For LoopArasu LingamNo ratings yet
- File Handling Cs Class 12Document19 pagesFile Handling Cs Class 12Raj MaliNo ratings yet
- Y6 Summer Block 1 WO4 Vertically Opposite Angles 2020 PDFDocument2 pagesY6 Summer Block 1 WO4 Vertically Opposite Angles 2020 PDFEmiNo ratings yet
- Third Liquefied Gas Loading Dock in Bontang, Indonesia: P.T. Inconed Indonesia, Jakarta, IndonesiaDocument5 pagesThird Liquefied Gas Loading Dock in Bontang, Indonesia: P.T. Inconed Indonesia, Jakarta, IndonesiaIsma VSNo ratings yet
- DSE8610 MKII Installation Instructions PDFDocument2 pagesDSE8610 MKII Installation Instructions PDFManuel Ortiz Galán100% (1)
- Durco Mark2and3 50Hz60Hz CurvesDocument60 pagesDurco Mark2and3 50Hz60Hz Curvesfagb1978100% (1)
- Time Value ProblemDocument8 pagesTime Value ProblemPrantik RayNo ratings yet
- 308 - B.Sc. (Part-I) Chemistry PDFDocument21 pages308 - B.Sc. (Part-I) Chemistry PDFKirodi MaliNo ratings yet
- Glycosidase Enzymes Stabilization Through Immobilization Onto Nanoparticulated Bimodal OrganosilicasDocument1 pageGlycosidase Enzymes Stabilization Through Immobilization Onto Nanoparticulated Bimodal Organosilicasdadang71No ratings yet
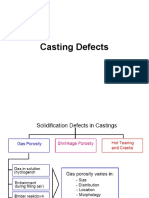
- Casting DefectsDocument27 pagesCasting DefectsRitik PatelNo ratings yet
- For Numbers 7 - 9, Refer To The Situation BelowDocument7 pagesFor Numbers 7 - 9, Refer To The Situation BelowRodion Romanovich RaskolnikovNo ratings yet