
Analysis of Rigid: For "Analysis Distributing Fixed-End Moments" by Hardy A.S.C.E., Fig
Analysis of Rigid: For "Analysis Distributing Fixed-End Moments" by Hardy A.S.C.E., Fig
You might also like
- G.weike CatalogDocument33 pagesG.weike CatalogManuelNo ratings yet
- Conjugate BeamDocument26 pagesConjugate BeamGodwin Acquah0% (1)
- Aerospace Material Specification: Aluminum Alloy 2024, Plate and SheetDocument8 pagesAerospace Material Specification: Aluminum Alloy 2024, Plate and SheetyouNo ratings yet
- Analysis Rigid For Hardy A.S.C.E.,: SXL/L, LDocument1 pageAnalysis Rigid For Hardy A.S.C.E.,: SXL/L, LSuman NakarmiNo ratings yet
- 5 - Moment Distribution Method PDFDocument15 pages5 - Moment Distribution Method PDFMohamad DuhokiNo ratings yet
- Internal Forces, Beams, Shear and Bending Moment DiagramsDocument26 pagesInternal Forces, Beams, Shear and Bending Moment DiagramsArjoy Annalyn D. ArcillaNo ratings yet
- 1.11 Slope-Deflection Method of Analysis of Indeterminate StructuresDocument47 pages1.11 Slope-Deflection Method of Analysis of Indeterminate Structuresravi maskeNo ratings yet
- Problema 01Document2 pagesProblema 01Belky Nicole Muñoz NavarroNo ratings yet
- Crystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsDocument22 pagesCrystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsMary WorkNo ratings yet
- Dim, Mam, Conjugate ReviewerDocument6 pagesDim, Mam, Conjugate ReviewercabbieNo ratings yet
- Moment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument7 pagesMoment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Slope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument8 pagesSlope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Influence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument3 pagesInfluence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Moment Distribution MethodDocument19 pagesMoment Distribution MethodAsiyah Abdullahi ShituNo ratings yet
- Unit 8 Moment Distribution Method: StructureDocument26 pagesUnit 8 Moment Distribution Method: StructureSUNIDHI VERMANo ratings yet
- Shear Force and Bending Moment - 1Document10 pagesShear Force and Bending Moment - 1Naveen UndrallaNo ratings yet
- 2 Cycle Moment DistributionDocument10 pages2 Cycle Moment DistributionYang W OngNo ratings yet
- Chapter 5Document49 pagesChapter 5ISRAEL HAILUNo ratings yet
- Analysis of Statically Indeterminate StructuresDocument87 pagesAnalysis of Statically Indeterminate StructuresSabih Hashim AlzuhairyNo ratings yet
- 1.2 Moment Distribution MethodDocument15 pages1.2 Moment Distribution MethodABAMELANo ratings yet
- Problems 269: Section 6.2Document6 pagesProblems 269: Section 6.2JenniferBermúdezNo ratings yet
- Fixed-End: This 3. ADocument1 pageFixed-End: This 3. AjosNo ratings yet
- Two Cycle Moment DistributionDocument10 pagesTwo Cycle Moment Distributionsatoni12No ratings yet
- Chapter IV Shear and Moment in Beams 4.1 4.2 4.3Document8 pagesChapter IV Shear and Moment in Beams 4.1 4.2 4.3Joshua John Julio100% (1)
- Tutorial 1,2,3Document8 pagesTutorial 1,2,3RameshNo ratings yet
- Stiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofDocument2 pagesStiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofmujeebNo ratings yet
- Conjugate-Beam MethodDocument20 pagesConjugate-Beam MethodJames Neo100% (1)
- Chapter 6 Shear and Moments in Beams Updting 2020Document19 pagesChapter 6 Shear and Moments in Beams Updting 2020k.ghanemNo ratings yet
- Engineering MechanicsDocument4 pagesEngineering MechanicsNitinNo ratings yet
- Strength I Chapter SixDocument16 pagesStrength I Chapter SixAbel ErmiasNo ratings yet
- Birla Vishvakarma Mahavidyalaya: TorsionDocument25 pagesBirla Vishvakarma Mahavidyalaya: TorsionPathan ShahidkhanNo ratings yet
- Structure Analysis 2 - Bece 3053 - Slope Deflection EquationDocument40 pagesStructure Analysis 2 - Bece 3053 - Slope Deflection EquationZaki 7070No ratings yet
- Chapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFDocument42 pagesChapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFYirga BezabehNo ratings yet
- AF, DE: InflectionDocument1 pageAF, DE: InflectionjosNo ratings yet
- Lec 29 PDFDocument11 pagesLec 29 PDFMohitNo ratings yet
- Module 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsDocument11 pagesModule 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsVishal RastogiNo ratings yet
- Endsem SolutionsDocument14 pagesEndsem Solutionsobservercosmonaut2005No ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- Kassimali A 2010 Bending Moment Diagrams by Parts 05Document5 pagesKassimali A 2010 Bending Moment Diagrams by Parts 05JenniferBermúdezNo ratings yet
- Fundamental Principles of Mechanics: ME231: Solid Mechanics-IDocument8 pagesFundamental Principles of Mechanics: ME231: Solid Mechanics-IRohan sharmaNo ratings yet
- S A D - I: Tructural Nalysis AND EsignDocument31 pagesS A D - I: Tructural Nalysis AND EsignRafiur RahmanNo ratings yet
- SA 2all PDFDocument13 pagesSA 2all PDFHrishikesh BhavsarNo ratings yet
- Me214 Wi16 W8 Ho PDFDocument8 pagesMe214 Wi16 W8 Ho PDFYakajNo ratings yet
- Mec32-3 Shear Moment in Beams With Simple LoadingDocument22 pagesMec32-3 Shear Moment in Beams With Simple LoadingJhenalyn Del RosarioNo ratings yet
- Lecture 8Document11 pagesLecture 8Mr. Danish SaeedNo ratings yet
- Design of Beam Column (Compatibility Mode)Document64 pagesDesign of Beam Column (Compatibility Mode)Sérgio MoraesNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityParesh NimodiyaNo ratings yet
- CVE431 417 2b Force MethodDocument14 pagesCVE431 417 2b Force MethodSamtheartkidNo ratings yet
- Engg Mechanics Paper Dec 2019 As Per CODocument4 pagesEngg Mechanics Paper Dec 2019 As Per COPiyush BhandariNo ratings yet
- Analysis of TrussDocument6 pagesAnalysis of TrussAbhisekh SahaNo ratings yet
- Unit Slope Deflection Method: StructureDocument25 pagesUnit Slope Deflection Method: StructureFaroq MaraqaNo ratings yet
- Calculation For Deflection of Continuous Reinforced Concrete Beams in Consideration of Moment RedistributionDocument12 pagesCalculation For Deflection of Continuous Reinforced Concrete Beams in Consideration of Moment RedistributionAnonymous YggO6T6GzNo ratings yet
- Unit-6 Theorem of Three MomentsDocument16 pagesUnit-6 Theorem of Three Momentskalpanaadhi100% (1)
- Conjugate Beam Method PDFDocument7 pagesConjugate Beam Method PDFdada100% (1)
- Lec-23 Viga Conjugada PDFDocument7 pagesLec-23 Viga Conjugada PDFVíctor Hugo Concha OrmeñoNo ratings yet
- Lecture 15Document19 pagesLecture 15Adam SurtiNo ratings yet
- Art of Elct Fragment 1Document12 pagesArt of Elct Fragment 1Victor HugoNo ratings yet
- M PhiDocument9 pagesM PhiVinayak PatilNo ratings yet
- GEG 113 SlidesDocument47 pagesGEG 113 SlidesOlajuwonNo ratings yet
- CE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force MethodDocument15 pagesCE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force Methodbsnow5325No ratings yet
- Hyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresFrom EverandHyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresNo ratings yet
- MDP 39015079943414 25 1657038408Document1 pageMDP 39015079943414 25 1657038408josNo ratings yet
- Preface: Carnegie Library 1927Document1 pagePreface: Carnegie Library 1927josNo ratings yet
- Guillet,, - . - , - ,, - Alloys Iron - Mineral: Steel P 194 and P 1895 The Uses Manganese 424 426Document1 pageGuillet,, - . - , - ,, - Alloys Iron - Mineral: Steel P 194 and P 1895 The Uses Manganese 424 426josNo ratings yet
- Of Journal Welding: 171 Cast SteelDocument1 pageOf Journal Welding: 171 Cast SteeljosNo ratings yet
- Harry .:, - ., - , - . Of,, - Prop Mild EdDocument1 pageHarry .:, - ., - , - . Of,, - Prop Mild EdjosNo ratings yet
- Of Of, .:, - . of Civil, - , - , - . Larry Made - . Age, - , - , - ,, Larry - . - in Foundry - Was - . TreatDocument1 pageOf Of, .:, - . of Civil, - , - , - . Larry Made - . Age, - , - , - ,, Larry - . - in Foundry - Was - . TreatjosNo ratings yet
- Welding, - , .) of - Armor Matter (Age 61 - , - ., - . Journal of Iron, - , .Document1 pageWelding, - , .) of - Armor Matter (Age 61 - , - ., - . Journal of Iron, - , .josNo ratings yet
- Jay - Manufacturing - , ,, - High Of, - Rolls JournalDocument1 pageJay - Manufacturing - , ,, - High Of, - Rolls JournaljosNo ratings yet
- I, I - I Of, Not, - IDocument1 pageI, I - I Of, Not, - IjosNo ratings yet
- It But Trivial - That: Its Encouragement To The of ThisDocument1 pageIt But Trivial - That: Its Encouragement To The of ThisjosNo ratings yet
- Design Multistory Buildings Maxi - of It of - , ConDocument1 pageDesign Multistory Buildings Maxi - of It of - , ConjosNo ratings yet
- Without Engineer) Without (In - , .Document1 pageWithout Engineer) Without (In - , .josNo ratings yet
- Design Multistory Buildings: Is InvolvedDocument1 pageDesign Multistory Buildings: Is InvolvedjosNo ratings yet
- AND Multistory Buildings: Floor Stair DesignDocument1 pageAND Multistory Buildings: Floor Stair DesignjosNo ratings yet
- Multistory BuildingsDocument1 pageMultistory BuildingsjosNo ratings yet
- Design Multistory Buildings: (ExceptDocument1 pageDesign Multistory Buildings: (ExceptjosNo ratings yet
- Design Multistory Buildings: Be Applied or More May at The Rate No Reduction As DeterminedDocument1 pageDesign Multistory Buildings: Be Applied or More May at The Rate No Reduction As DeterminedjosNo ratings yet
- Multistory Buildings Will: For That PartitionDocument1 pageMultistory Buildings Will: For That PartitionjosNo ratings yet
- Floor and Stair Design For: Multistory BuildingsDocument1 pageFloor and Stair Design For: Multistory BuildingsjosNo ratings yet
- Gravity Loads Multistory BuildingsDocument1 pageGravity Loads Multistory BuildingsjosNo ratings yet
- Sesse: Multistory Buildings Concrete Joist ofDocument1 pageSesse: Multistory Buildings Concrete Joist ofjosNo ratings yet
- Multistory Buildings ofDocument1 pageMultistory Buildings ofjosNo ratings yet
- Design Multistory Buildings Of: 84 Floor and Stair Joist NeutralDocument1 pageDesign Multistory Buildings Of: 84 Floor and Stair Joist NeutraljosNo ratings yet
- Design Multistory Buildings: Floor and Stair FOR Is C13 X EqDocument1 pageDesign Multistory Buildings: Floor and Stair FOR Is C13 X EqjosNo ratings yet
- And Stair Multistory Buildings: Floor DesignDocument1 pageAnd Stair Multistory Buildings: Floor DesignjosNo ratings yet
- Preface: of The Existing of The MonumentsDocument1 pagePreface: of The Existing of The MonumentsjosNo ratings yet
- Design Multistory Buildings - It: Floor and Stair Example ForDocument1 pageDesign Multistory Buildings - It: Floor and Stair Example ForjosNo ratings yet
- Multistory Buildings: All WidthDocument1 pageMultistory Buildings: All WidthjosNo ratings yet
- Used Footnotes: of TheDocument1 pageUsed Footnotes: of ThejosNo ratings yet
- VI Viii: List Illustrations PlatesDocument1 pageVI Viii: List Illustrations PlatesjosNo ratings yet
- Time Delay RelayDocument24 pagesTime Delay Relayzelalem walieNo ratings yet
- 6.application of Derivatives KCET PYQ - A310ed0a A46d 48e2 b3f2 0bdae060755fDocument2 pages6.application of Derivatives KCET PYQ - A310ed0a A46d 48e2 b3f2 0bdae060755fdollyhitesh9548No ratings yet
- SER235 Design and Evaluation of Steel Bridges For Fatigue and FractureDocument157 pagesSER235 Design and Evaluation of Steel Bridges For Fatigue and FractureJazer EspinozaNo ratings yet
- RCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pDocument340 pagesRCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pEMVSNo ratings yet
- S235jr Carbon SteelDocument2 pagesS235jr Carbon Steelcheligp1981No ratings yet
- V4453 Trespa Virtuon Interior Panels (Incl. Color Collection) 03 2010 Tcm9-11167Document22 pagesV4453 Trespa Virtuon Interior Panels (Incl. Color Collection) 03 2010 Tcm9-11167dannykilNo ratings yet
- Making and Using U-Bend Stress-Corrosion Test Specimens: Standard Practice ForDocument7 pagesMaking and Using U-Bend Stress-Corrosion Test Specimens: Standard Practice ForHadi HowaidaNo ratings yet
- Construction Materials & Testing: Learning OutcomesDocument3 pagesConstruction Materials & Testing: Learning Outcomesmichaeldiega07No ratings yet
- Into To Physics-Measurement SlidesDocument19 pagesInto To Physics-Measurement SlidesKỳ ThiNo ratings yet
- A Novel Physics Node For Nakamura Crystallization KineticsDocument6 pagesA Novel Physics Node For Nakamura Crystallization KineticsHiba MhiriNo ratings yet
- Ci LNK623-626Document20 pagesCi LNK623-626Tvsena Imagem E SomNo ratings yet
- Links of XII Physics Investigatory Project Allowtment 2Document1 pageLinks of XII Physics Investigatory Project Allowtment 2Vishesh Jaipuria50% (2)
- Casting AssignmentDocument7 pagesCasting AssignmentLEKA THOBEJANENo ratings yet
- NDA II 2019 Math (Previous Year Paper) : WWW - Gradeup.coDocument29 pagesNDA II 2019 Math (Previous Year Paper) : WWW - Gradeup.coHarshit PandeyNo ratings yet
- Installation RecommendationsDocument22 pagesInstallation RecommendationsAsif ShahNo ratings yet
- Fe282 PDFDocument33 pagesFe282 PDFdhmbasNo ratings yet
- Chapter 9 Series Compensation StudyDocument12 pagesChapter 9 Series Compensation StudyVigneshwaran KandaswamyNo ratings yet
- Sofarsolar Datasheet - 1-3KW-G3 - en - 202003 - V2-20200312Document2 pagesSofarsolar Datasheet - 1-3KW-G3 - en - 202003 - V2-20200312Engenheiro EletricistaNo ratings yet
- Nozzle Repad PDFDocument1 pageNozzle Repad PDFChiheb KaanicheNo ratings yet
- Harmonics in Three Phase TransformersDocument3 pagesHarmonics in Three Phase TransformersSaurabhThakurNo ratings yet
- Mohan Maheshwari Assistant Professor-II & Head Department of Mechanical Engineering, Institute of Engineering & Technology, MUDocument36 pagesMohan Maheshwari Assistant Professor-II & Head Department of Mechanical Engineering, Institute of Engineering & Technology, MUMohan MaheshwarINo ratings yet
- 26 Punch Press ToolingDocument10 pages26 Punch Press ToolingAntoine LaurentNo ratings yet
- RPC Manual (English)Document23 pagesRPC Manual (English)Justice KNo ratings yet
- Prediction of Wear in A Dumper Truck Body by Coupling SPH-FEM and Dem/FemDocument17 pagesPrediction of Wear in A Dumper Truck Body by Coupling SPH-FEM and Dem/FemOscar OrozcoNo ratings yet
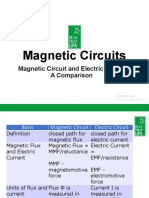
- Magnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonDocument13 pagesMagnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonTrisha SARMIENTONo ratings yet
- Zelio RelayDocument376 pagesZelio RelayCarol MosquedaNo ratings yet
- Wide-Lite Aktra GP Floodlight Bulletin 1996Document4 pagesWide-Lite Aktra GP Floodlight Bulletin 1996Alan MastersNo ratings yet
- Ams (TMS)Document8 pagesAms (TMS)aloisioNo ratings yet























































































































Download as pdf or txt
You might also like
- G.weike CatalogDocument33 pagesG.weike CatalogManuelNo ratings yet
- Conjugate BeamDocument26 pagesConjugate BeamGodwin Acquah0% (1)
- Aerospace Material Specification: Aluminum Alloy 2024, Plate and SheetDocument8 pagesAerospace Material Specification: Aluminum Alloy 2024, Plate and SheetyouNo ratings yet
- Analysis Rigid For Hardy A.S.C.E.,: SXL/L, LDocument1 pageAnalysis Rigid For Hardy A.S.C.E.,: SXL/L, LSuman NakarmiNo ratings yet
- 5 - Moment Distribution Method PDFDocument15 pages5 - Moment Distribution Method PDFMohamad DuhokiNo ratings yet
- Internal Forces, Beams, Shear and Bending Moment DiagramsDocument26 pagesInternal Forces, Beams, Shear and Bending Moment DiagramsArjoy Annalyn D. ArcillaNo ratings yet
- 1.11 Slope-Deflection Method of Analysis of Indeterminate StructuresDocument47 pages1.11 Slope-Deflection Method of Analysis of Indeterminate Structuresravi maskeNo ratings yet
- Problema 01Document2 pagesProblema 01Belky Nicole Muñoz NavarroNo ratings yet
- Crystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsDocument22 pagesCrystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsMary WorkNo ratings yet
- Dim, Mam, Conjugate ReviewerDocument6 pagesDim, Mam, Conjugate ReviewercabbieNo ratings yet
- Moment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument7 pagesMoment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Slope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument8 pagesSlope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Influence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument3 pagesInfluence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Moment Distribution MethodDocument19 pagesMoment Distribution MethodAsiyah Abdullahi ShituNo ratings yet
- Unit 8 Moment Distribution Method: StructureDocument26 pagesUnit 8 Moment Distribution Method: StructureSUNIDHI VERMANo ratings yet
- Shear Force and Bending Moment - 1Document10 pagesShear Force and Bending Moment - 1Naveen UndrallaNo ratings yet
- 2 Cycle Moment DistributionDocument10 pages2 Cycle Moment DistributionYang W OngNo ratings yet
- Chapter 5Document49 pagesChapter 5ISRAEL HAILUNo ratings yet
- Analysis of Statically Indeterminate StructuresDocument87 pagesAnalysis of Statically Indeterminate StructuresSabih Hashim AlzuhairyNo ratings yet
- 1.2 Moment Distribution MethodDocument15 pages1.2 Moment Distribution MethodABAMELANo ratings yet
- Problems 269: Section 6.2Document6 pagesProblems 269: Section 6.2JenniferBermúdezNo ratings yet
- Fixed-End: This 3. ADocument1 pageFixed-End: This 3. AjosNo ratings yet
- Two Cycle Moment DistributionDocument10 pagesTwo Cycle Moment Distributionsatoni12No ratings yet
- Chapter IV Shear and Moment in Beams 4.1 4.2 4.3Document8 pagesChapter IV Shear and Moment in Beams 4.1 4.2 4.3Joshua John Julio100% (1)
- Tutorial 1,2,3Document8 pagesTutorial 1,2,3RameshNo ratings yet
- Stiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofDocument2 pagesStiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofmujeebNo ratings yet
- Conjugate-Beam MethodDocument20 pagesConjugate-Beam MethodJames Neo100% (1)
- Chapter 6 Shear and Moments in Beams Updting 2020Document19 pagesChapter 6 Shear and Moments in Beams Updting 2020k.ghanemNo ratings yet
- Engineering MechanicsDocument4 pagesEngineering MechanicsNitinNo ratings yet
- Strength I Chapter SixDocument16 pagesStrength I Chapter SixAbel ErmiasNo ratings yet
- Birla Vishvakarma Mahavidyalaya: TorsionDocument25 pagesBirla Vishvakarma Mahavidyalaya: TorsionPathan ShahidkhanNo ratings yet
- Structure Analysis 2 - Bece 3053 - Slope Deflection EquationDocument40 pagesStructure Analysis 2 - Bece 3053 - Slope Deflection EquationZaki 7070No ratings yet
- Chapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFDocument42 pagesChapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFYirga BezabehNo ratings yet
- AF, DE: InflectionDocument1 pageAF, DE: InflectionjosNo ratings yet
- Lec 29 PDFDocument11 pagesLec 29 PDFMohitNo ratings yet
- Module 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsDocument11 pagesModule 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsVishal RastogiNo ratings yet
- Endsem SolutionsDocument14 pagesEndsem Solutionsobservercosmonaut2005No ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- Kassimali A 2010 Bending Moment Diagrams by Parts 05Document5 pagesKassimali A 2010 Bending Moment Diagrams by Parts 05JenniferBermúdezNo ratings yet
- Fundamental Principles of Mechanics: ME231: Solid Mechanics-IDocument8 pagesFundamental Principles of Mechanics: ME231: Solid Mechanics-IRohan sharmaNo ratings yet
- S A D - I: Tructural Nalysis AND EsignDocument31 pagesS A D - I: Tructural Nalysis AND EsignRafiur RahmanNo ratings yet
- SA 2all PDFDocument13 pagesSA 2all PDFHrishikesh BhavsarNo ratings yet
- Me214 Wi16 W8 Ho PDFDocument8 pagesMe214 Wi16 W8 Ho PDFYakajNo ratings yet
- Mec32-3 Shear Moment in Beams With Simple LoadingDocument22 pagesMec32-3 Shear Moment in Beams With Simple LoadingJhenalyn Del RosarioNo ratings yet
- Lecture 8Document11 pagesLecture 8Mr. Danish SaeedNo ratings yet
- Design of Beam Column (Compatibility Mode)Document64 pagesDesign of Beam Column (Compatibility Mode)Sérgio MoraesNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityParesh NimodiyaNo ratings yet
- CVE431 417 2b Force MethodDocument14 pagesCVE431 417 2b Force MethodSamtheartkidNo ratings yet
- Engg Mechanics Paper Dec 2019 As Per CODocument4 pagesEngg Mechanics Paper Dec 2019 As Per COPiyush BhandariNo ratings yet
- Analysis of TrussDocument6 pagesAnalysis of TrussAbhisekh SahaNo ratings yet
- Unit Slope Deflection Method: StructureDocument25 pagesUnit Slope Deflection Method: StructureFaroq MaraqaNo ratings yet
- Calculation For Deflection of Continuous Reinforced Concrete Beams in Consideration of Moment RedistributionDocument12 pagesCalculation For Deflection of Continuous Reinforced Concrete Beams in Consideration of Moment RedistributionAnonymous YggO6T6GzNo ratings yet
- Unit-6 Theorem of Three MomentsDocument16 pagesUnit-6 Theorem of Three Momentskalpanaadhi100% (1)
- Conjugate Beam Method PDFDocument7 pagesConjugate Beam Method PDFdada100% (1)
- Lec-23 Viga Conjugada PDFDocument7 pagesLec-23 Viga Conjugada PDFVíctor Hugo Concha OrmeñoNo ratings yet
- Lecture 15Document19 pagesLecture 15Adam SurtiNo ratings yet
- Art of Elct Fragment 1Document12 pagesArt of Elct Fragment 1Victor HugoNo ratings yet
- M PhiDocument9 pagesM PhiVinayak PatilNo ratings yet
- GEG 113 SlidesDocument47 pagesGEG 113 SlidesOlajuwonNo ratings yet
- CE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force MethodDocument15 pagesCE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force Methodbsnow5325No ratings yet
- Hyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresFrom EverandHyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresNo ratings yet
- MDP 39015079943414 25 1657038408Document1 pageMDP 39015079943414 25 1657038408josNo ratings yet
- Preface: Carnegie Library 1927Document1 pagePreface: Carnegie Library 1927josNo ratings yet
- Guillet,, - . - , - ,, - Alloys Iron - Mineral: Steel P 194 and P 1895 The Uses Manganese 424 426Document1 pageGuillet,, - . - , - ,, - Alloys Iron - Mineral: Steel P 194 and P 1895 The Uses Manganese 424 426josNo ratings yet
- Of Journal Welding: 171 Cast SteelDocument1 pageOf Journal Welding: 171 Cast SteeljosNo ratings yet
- Harry .:, - ., - , - . Of,, - Prop Mild EdDocument1 pageHarry .:, - ., - , - . Of,, - Prop Mild EdjosNo ratings yet
- Of Of, .:, - . of Civil, - , - , - . Larry Made - . Age, - , - , - ,, Larry - . - in Foundry - Was - . TreatDocument1 pageOf Of, .:, - . of Civil, - , - , - . Larry Made - . Age, - , - , - ,, Larry - . - in Foundry - Was - . TreatjosNo ratings yet
- Welding, - , .) of - Armor Matter (Age 61 - , - ., - . Journal of Iron, - , .Document1 pageWelding, - , .) of - Armor Matter (Age 61 - , - ., - . Journal of Iron, - , .josNo ratings yet
- Jay - Manufacturing - , ,, - High Of, - Rolls JournalDocument1 pageJay - Manufacturing - , ,, - High Of, - Rolls JournaljosNo ratings yet
- I, I - I Of, Not, - IDocument1 pageI, I - I Of, Not, - IjosNo ratings yet
- It But Trivial - That: Its Encouragement To The of ThisDocument1 pageIt But Trivial - That: Its Encouragement To The of ThisjosNo ratings yet
- Design Multistory Buildings Maxi - of It of - , ConDocument1 pageDesign Multistory Buildings Maxi - of It of - , ConjosNo ratings yet
- Without Engineer) Without (In - , .Document1 pageWithout Engineer) Without (In - , .josNo ratings yet
- Design Multistory Buildings: Is InvolvedDocument1 pageDesign Multistory Buildings: Is InvolvedjosNo ratings yet
- AND Multistory Buildings: Floor Stair DesignDocument1 pageAND Multistory Buildings: Floor Stair DesignjosNo ratings yet
- Multistory BuildingsDocument1 pageMultistory BuildingsjosNo ratings yet
- Design Multistory Buildings: (ExceptDocument1 pageDesign Multistory Buildings: (ExceptjosNo ratings yet
- Design Multistory Buildings: Be Applied or More May at The Rate No Reduction As DeterminedDocument1 pageDesign Multistory Buildings: Be Applied or More May at The Rate No Reduction As DeterminedjosNo ratings yet
- Multistory Buildings Will: For That PartitionDocument1 pageMultistory Buildings Will: For That PartitionjosNo ratings yet
- Floor and Stair Design For: Multistory BuildingsDocument1 pageFloor and Stair Design For: Multistory BuildingsjosNo ratings yet
- Gravity Loads Multistory BuildingsDocument1 pageGravity Loads Multistory BuildingsjosNo ratings yet
- Sesse: Multistory Buildings Concrete Joist ofDocument1 pageSesse: Multistory Buildings Concrete Joist ofjosNo ratings yet
- Multistory Buildings ofDocument1 pageMultistory Buildings ofjosNo ratings yet
- Design Multistory Buildings Of: 84 Floor and Stair Joist NeutralDocument1 pageDesign Multistory Buildings Of: 84 Floor and Stair Joist NeutraljosNo ratings yet
- Design Multistory Buildings: Floor and Stair FOR Is C13 X EqDocument1 pageDesign Multistory Buildings: Floor and Stair FOR Is C13 X EqjosNo ratings yet
- And Stair Multistory Buildings: Floor DesignDocument1 pageAnd Stair Multistory Buildings: Floor DesignjosNo ratings yet
- Preface: of The Existing of The MonumentsDocument1 pagePreface: of The Existing of The MonumentsjosNo ratings yet
- Design Multistory Buildings - It: Floor and Stair Example ForDocument1 pageDesign Multistory Buildings - It: Floor and Stair Example ForjosNo ratings yet
- Multistory Buildings: All WidthDocument1 pageMultistory Buildings: All WidthjosNo ratings yet
- Used Footnotes: of TheDocument1 pageUsed Footnotes: of ThejosNo ratings yet
- VI Viii: List Illustrations PlatesDocument1 pageVI Viii: List Illustrations PlatesjosNo ratings yet
- Time Delay RelayDocument24 pagesTime Delay Relayzelalem walieNo ratings yet
- 6.application of Derivatives KCET PYQ - A310ed0a A46d 48e2 b3f2 0bdae060755fDocument2 pages6.application of Derivatives KCET PYQ - A310ed0a A46d 48e2 b3f2 0bdae060755fdollyhitesh9548No ratings yet
- SER235 Design and Evaluation of Steel Bridges For Fatigue and FractureDocument157 pagesSER235 Design and Evaluation of Steel Bridges For Fatigue and FractureJazer EspinozaNo ratings yet
- RCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pDocument340 pagesRCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pEMVSNo ratings yet
- S235jr Carbon SteelDocument2 pagesS235jr Carbon Steelcheligp1981No ratings yet
- V4453 Trespa Virtuon Interior Panels (Incl. Color Collection) 03 2010 Tcm9-11167Document22 pagesV4453 Trespa Virtuon Interior Panels (Incl. Color Collection) 03 2010 Tcm9-11167dannykilNo ratings yet
- Making and Using U-Bend Stress-Corrosion Test Specimens: Standard Practice ForDocument7 pagesMaking and Using U-Bend Stress-Corrosion Test Specimens: Standard Practice ForHadi HowaidaNo ratings yet
- Construction Materials & Testing: Learning OutcomesDocument3 pagesConstruction Materials & Testing: Learning Outcomesmichaeldiega07No ratings yet
- Into To Physics-Measurement SlidesDocument19 pagesInto To Physics-Measurement SlidesKỳ ThiNo ratings yet
- A Novel Physics Node For Nakamura Crystallization KineticsDocument6 pagesA Novel Physics Node For Nakamura Crystallization KineticsHiba MhiriNo ratings yet
- Ci LNK623-626Document20 pagesCi LNK623-626Tvsena Imagem E SomNo ratings yet
- Links of XII Physics Investigatory Project Allowtment 2Document1 pageLinks of XII Physics Investigatory Project Allowtment 2Vishesh Jaipuria50% (2)
- Casting AssignmentDocument7 pagesCasting AssignmentLEKA THOBEJANENo ratings yet
- NDA II 2019 Math (Previous Year Paper) : WWW - Gradeup.coDocument29 pagesNDA II 2019 Math (Previous Year Paper) : WWW - Gradeup.coHarshit PandeyNo ratings yet
- Installation RecommendationsDocument22 pagesInstallation RecommendationsAsif ShahNo ratings yet
- Fe282 PDFDocument33 pagesFe282 PDFdhmbasNo ratings yet
- Chapter 9 Series Compensation StudyDocument12 pagesChapter 9 Series Compensation StudyVigneshwaran KandaswamyNo ratings yet
- Sofarsolar Datasheet - 1-3KW-G3 - en - 202003 - V2-20200312Document2 pagesSofarsolar Datasheet - 1-3KW-G3 - en - 202003 - V2-20200312Engenheiro EletricistaNo ratings yet
- Nozzle Repad PDFDocument1 pageNozzle Repad PDFChiheb KaanicheNo ratings yet
- Harmonics in Three Phase TransformersDocument3 pagesHarmonics in Three Phase TransformersSaurabhThakurNo ratings yet
- Mohan Maheshwari Assistant Professor-II & Head Department of Mechanical Engineering, Institute of Engineering & Technology, MUDocument36 pagesMohan Maheshwari Assistant Professor-II & Head Department of Mechanical Engineering, Institute of Engineering & Technology, MUMohan MaheshwarINo ratings yet
- 26 Punch Press ToolingDocument10 pages26 Punch Press ToolingAntoine LaurentNo ratings yet
- RPC Manual (English)Document23 pagesRPC Manual (English)Justice KNo ratings yet
- Prediction of Wear in A Dumper Truck Body by Coupling SPH-FEM and Dem/FemDocument17 pagesPrediction of Wear in A Dumper Truck Body by Coupling SPH-FEM and Dem/FemOscar OrozcoNo ratings yet
- Magnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonDocument13 pagesMagnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonTrisha SARMIENTONo ratings yet
- Zelio RelayDocument376 pagesZelio RelayCarol MosquedaNo ratings yet
- Wide-Lite Aktra GP Floodlight Bulletin 1996Document4 pagesWide-Lite Aktra GP Floodlight Bulletin 1996Alan MastersNo ratings yet
- Ams (TMS)Document8 pagesAms (TMS)aloisioNo ratings yet