Download as pdf or txt
You might also like
- Muhammad Shoaib, S Resume (API 510-API 570-API 653)Document6 pagesMuhammad Shoaib, S Resume (API 510-API 570-API 653)Muhammad Shoaib50% (4)
- Bhushan Power and Steel Limited: Draft Internal Audit Report - Production and Maintenance ReviewDocument26 pagesBhushan Power and Steel Limited: Draft Internal Audit Report - Production and Maintenance ReviewJagdish Mishra100% (1)
- Ucc 100Document4 pagesUcc 100Kimondo King67% (3)
- Series DC Motor (I) : Experiment 7Document6 pagesSeries DC Motor (I) : Experiment 7manikandanNo ratings yet
- Lab 6Document30 pagesLab 6Mohit GriptaNo ratings yet
- Motor Star Delta ConnectionDocument11 pagesMotor Star Delta ConnectionsubirmeNo ratings yet
- DC Shunt Motor Exp7 PDFDocument10 pagesDC Shunt Motor Exp7 PDFGopinath B L NaiduNo ratings yet
- Magnetic Circuits and Magnetic Materials - GDLCDocument13 pagesMagnetic Circuits and Magnetic Materials - GDLCAbderrahmen SellamiNo ratings yet
- 226 Electrical Machine-IIDocument99 pages226 Electrical Machine-IINuri BerishaNo ratings yet
- BLDC: Motor FailureDocument5 pagesBLDC: Motor FailureInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- IJSC Vol2 Iss1 253 260 2 PDFDocument8 pagesIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- STB LabDocument16 pagesSTB Labapi-3831923No ratings yet
- DC Motor: Torque Equation of DC Motor For Establishing Its Running CharacteristicsDocument3 pagesDC Motor: Torque Equation of DC Motor For Establishing Its Running CharacteristicsVienNgocQuangNo ratings yet
- Manual Performance Analysis of A 2.2kw Refurbished Three-Phase Induction MotorDocument7 pagesManual Performance Analysis of A 2.2kw Refurbished Three-Phase Induction MotorInternational Organization of Scientific Research (IOSR)No ratings yet
- DC Motor: Torque of DC Motor Torque Equation of DC MotorDocument4 pagesDC Motor: Torque of DC Motor Torque Equation of DC MotorharilakNo ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Controlled Rectifier D.C. Brush Motor DrivesDocument21 pagesControlled Rectifier D.C. Brush Motor DrivesJJGNo ratings yet
- Upec 2Document7 pagesUpec 2manjusingNo ratings yet
- A Cumulative Compound Motor Has A Definite No Load Speed and So It Does NotDocument10 pagesA Cumulative Compound Motor Has A Definite No Load Speed and So It Does NotS.m. FerdousNo ratings yet
- Transfer Function Model For Electric VehicleDocument10 pagesTransfer Function Model For Electric VehicleFarhan MalikNo ratings yet
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocument7 pagesECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterNo ratings yet
- Chapter Six Types of D-C Generators: / R V I I I R I - E VDocument7 pagesChapter Six Types of D-C Generators: / R V I I I R I - E VbalsamNo ratings yet
- Alternator Operation:: Operation & Characteristics of Synchronous GeneratorDocument7 pagesAlternator Operation:: Operation & Characteristics of Synchronous Generatortumwine reubenNo ratings yet
- MATLAB Speed Control DC MotorDocument4 pagesMATLAB Speed Control DC MotorEngineering and Scientific International JournalNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- Averaged Switch Modeling,: AC Equivalent Circuit ModelingDocument12 pagesAveraged Switch Modeling,: AC Equivalent Circuit ModelingJulián RincónNo ratings yet
- In Robotic Drives, Printers, Machine Tools, Process Rolling Mills, Paper and Textile IndustriesDocument40 pagesIn Robotic Drives, Printers, Machine Tools, Process Rolling Mills, Paper and Textile IndustriesATULYA ALOK 17BEE0065No ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- IM - Motors To GensDocument4 pagesIM - Motors To Gensmenilanjan89nLNo ratings yet
- Lab1: Control/ Electronics System Design: 1/ Requirement AnalysisDocument16 pagesLab1: Control/ Electronics System Design: 1/ Requirement AnalysisJoseph NguyenNo ratings yet
- Ijest12 04 01 032 PDFDocument6 pagesIjest12 04 01 032 PDFMohd SarfarazNo ratings yet
- Chapter11 PDFDocument39 pagesChapter11 PDFSai KiranNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Parallel Operation of Synchronous GeneratorsDocument8 pagesParallel Operation of Synchronous Generatorsabdellah faqdaniNo ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- DC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterDocument4 pagesDC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterRavindra MauryaNo ratings yet
- Lecture 1-3Document11 pagesLecture 1-3Teneille BallNo ratings yet
- Chap 2Document11 pagesChap 2S.m. FerdousNo ratings yet
- Speed Control of PMBLDC MotorDocument21 pagesSpeed Control of PMBLDC MotorGururaj BandaNo ratings yet
- Basic Electronics CseDocument2 pagesBasic Electronics CseUmashankar VermaNo ratings yet
- SSRN Id2772630 Tjeuuhgyfguh7776445Document6 pagesSSRN Id2772630 Tjeuuhgyfguh7776445Mustapha AbdullahiNo ratings yet
- Design of A Coffee Vending Machine Using Single Electron DevicesDocument6 pagesDesign of A Coffee Vending Machine Using Single Electron DevicespntuanhcmNo ratings yet
- Windows-1256 00349655Document8 pagesWindows-1256 00349655enmnabilNo ratings yet
- Modelling and Simulation of Synchronous Machine Transient AnalysisDocument10 pagesModelling and Simulation of Synchronous Machine Transient AnalysisManikandan DurairajNo ratings yet
- GP FileDocument14 pagesGP FileVikri RahmatNo ratings yet
- PE Lecture No.08 PDFDocument15 pagesPE Lecture No.08 PDFmonish halder100% (2)
- Text10 PDFDocument19 pagesText10 PDFJosNo ratings yet
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- Single-Machine Infinite Bus SystemDocument18 pagesSingle-Machine Infinite Bus SystemMuhammad FajraNo ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
- Drives and Controls Lab Manual1 PDFDocument58 pagesDrives and Controls Lab Manual1 PDFDinesh ReddyNo ratings yet
- Paper 2 - PEL20120014 - 2ndDocument5 pagesPaper 2 - PEL20120014 - 2ndSherif M. DabourNo ratings yet
- Module 2 - Series DC MotorDocument8 pagesModule 2 - Series DC MotorMARY JOY MAGAWAYNo ratings yet
- The Simplified Circle DiagramDocument5 pagesThe Simplified Circle DiagramPradeep RajasekeranNo ratings yet
- EM-2 Unit-4 Notes (R20)Document33 pagesEM-2 Unit-4 Notes (R20)tripgokarna08No ratings yet
- Chapter 3 Voltage ControlDocument47 pagesChapter 3 Voltage Controlbacuoc.nguyen356No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- Theory of Structures: Third Class 2018-2019Document4 pagesTheory of Structures: Third Class 2018-2019balsamNo ratings yet
- Example: Analyze The Frame Shown Below by The Method of Consistent Deformation. EI Is Constant. SolutionDocument3 pagesExample: Analyze The Frame Shown Below by The Method of Consistent Deformation. EI Is Constant. SolutionbalsamNo ratings yet
- Analysis of Indeterminate Trusses: No. of Redundant Forces Degree of IndeterminacyDocument3 pagesAnalysis of Indeterminate Trusses: No. of Redundant Forces Degree of IndeterminacybalsamNo ratings yet
- S.D M 1.54 M 3.09: Theory of Structures Indeterminate Structures: Slope-Deflection MethodDocument3 pagesS.D M 1.54 M 3.09: Theory of Structures Indeterminate Structures: Slope-Deflection Methodbalsam100% (1)
- Commutation: DT D NDocument6 pagesCommutation: DT D NbalsamNo ratings yet
- Analysis of Indeterminate Structures by Slope-Deflection MethodDocument3 pagesAnalysis of Indeterminate Structures by Slope-Deflection Methodbalsam100% (1)
- 10.2 Device InterconnectionsDocument7 pages10.2 Device InterconnectionsbalsamNo ratings yet
- Experiment 3 Center of Pressure: Asst - Lectuer: Mohammed Abid JameelDocument6 pagesExperiment 3 Center of Pressure: Asst - Lectuer: Mohammed Abid JameelbalsamNo ratings yet
- Introduction & Fundamentals: Digital Image ProcessingDocument30 pagesIntroduction & Fundamentals: Digital Image ProcessingbalsamNo ratings yet
- ( (Manufacturing) ) : Cutting Tool Shapes & FormsDocument4 pages( (Manufacturing) ) : Cutting Tool Shapes & FormsbalsamNo ratings yet
- Eng. 6002 Ship Structures 1 Hull Girder Response Analysis: Lecture 7: Review of Beam TheoryDocument21 pagesEng. 6002 Ship Structures 1 Hull Girder Response Analysis: Lecture 7: Review of Beam TheorybalsamNo ratings yet
- Chapter Six Types of D-C Generators: / R V I I I R I - E VDocument7 pagesChapter Six Types of D-C Generators: / R V I I I R I - E VbalsamNo ratings yet
- Hopefield Neural Network: Prepared By: Dr. Nidhal KareemDocument7 pagesHopefield Neural Network: Prepared By: Dr. Nidhal KareembalsamNo ratings yet
- Cumulative Frequency DistributionDocument9 pagesCumulative Frequency DistributionbalsamNo ratings yet
- ( (Manufacturing) ) : Material Removal Process (Cutting Process)Document4 pages( (Manufacturing) ) : Material Removal Process (Cutting Process)balsamNo ratings yet
- What Are The Types of Greenhouse Gases?: O Carbon Dioxide (CO2), O Methane (CH4), O Nitrous Oxide (N2O)Document12 pagesWhat Are The Types of Greenhouse Gases?: O Carbon Dioxide (CO2), O Methane (CH4), O Nitrous Oxide (N2O)balsamNo ratings yet
- The Temperature Rise:: Lecture Nineteen - 2Document6 pagesThe Temperature Rise:: Lecture Nineteen - 2balsamNo ratings yet
- Obstacles During The Measurement:: The Obstacles Are Genearally Large Water Bodies, I.E Lakes, Rivers, EtcDocument6 pagesObstacles During The Measurement:: The Obstacles Are Genearally Large Water Bodies, I.E Lakes, Rivers, EtcbalsamNo ratings yet
- Example 3.E - GrafDocument13 pagesExample 3.E - GrafbalsamNo ratings yet
- Cross Product:: Note 1-IfDocument8 pagesCross Product:: Note 1-IfbalsamNo ratings yet
- 4-2-6 Velocity Diagram of Centrifugal Pump: G U V U V HDocument8 pages4-2-6 Velocity Diagram of Centrifugal Pump: G U V U V HbalsamNo ratings yet
- Lecture 2 (Properties of Moist Air) - Atmospheric AirDocument5 pagesLecture 2 (Properties of Moist Air) - Atmospheric AirbalsamNo ratings yet
- Lecture 3 (Psychometric Chart) - Psychometric ChartDocument7 pagesLecture 3 (Psychometric Chart) - Psychometric ChartbalsamNo ratings yet
- Activity - On - Arrow (A-O-A) Network Planning Technique Example 3Document9 pagesActivity - On - Arrow (A-O-A) Network Planning Technique Example 3balsamNo ratings yet
- An Introduction To Autocad For BeginnersDocument12 pagesAn Introduction To Autocad For BeginnersbalsamNo ratings yet
- An Introduction To Autocad For BeginnersDocument12 pagesAn Introduction To Autocad For BeginnersbalsamNo ratings yet
- Previous StudiesDocument19 pagesPrevious StudiesbalsamNo ratings yet
- Types of EpoxyDocument5 pagesTypes of EpoxybalsamNo ratings yet
- Chapter (4) (Pump)Document9 pagesChapter (4) (Pump)balsamNo ratings yet
- Activity - On - Arrow (A-O-A) Network Planning Technique Drawing Project NetworkDocument9 pagesActivity - On - Arrow (A-O-A) Network Planning Technique Drawing Project NetworkbalsamNo ratings yet
- Techdoc Print Page PDFDocument3 pagesTechdoc Print Page PDFSuharto ZuhriNo ratings yet
- Catalog Duct Seal Panduit PDFDocument1 pageCatalog Duct Seal Panduit PDFedy yusufNo ratings yet
- Wagner Spring 2014 CS 161 Computer Security Final Exam: (Last) (First)Document23 pagesWagner Spring 2014 CS 161 Computer Security Final Exam: (Last) (First)Ahsan RamzanNo ratings yet
- A Step by Step Guide For Healthcare Content Marketing SuccessDocument11 pagesA Step by Step Guide For Healthcare Content Marketing Successexpo M1No ratings yet
- Sha 2Document51 pagesSha 2sprasadn66No ratings yet
- Advanced Computer Architecture: Dr. Muhammad Bilal KadriDocument28 pagesAdvanced Computer Architecture: Dr. Muhammad Bilal KadriSana BilalNo ratings yet
- Cullen v. Zoom Video Communications, Inc., Case 5:20-cv-02155-SVK (Northern District of California)Document23 pagesCullen v. Zoom Video Communications, Inc., Case 5:20-cv-02155-SVK (Northern District of California)Law&CrimeNo ratings yet
- Fma/aama 100-12Document24 pagesFma/aama 100-12noahb110No ratings yet
- Colorado Rental Application FormDocument5 pagesColorado Rental Application FormMichelle TaylorNo ratings yet
- Reaction PaperDocument1 pageReaction PaperNhel AlvaroNo ratings yet
- A Large-Scale Full-Wave Simulator For RF DesignsDocument55 pagesA Large-Scale Full-Wave Simulator For RF Designshuyadong1234No ratings yet
- J277 1.3.1 Networks TopologiesDocument4 pagesJ277 1.3.1 Networks TopologiesalexanderjimjohnNo ratings yet
- RHUB3908 Hardware Maintenance GuideDocument22 pagesRHUB3908 Hardware Maintenance Guideapiruck sukjingNo ratings yet
- 18ECC203J - Microprocessor, Microcontroller & Interfacing Techniques LabDocument13 pages18ECC203J - Microprocessor, Microcontroller & Interfacing Techniques Labswagata mandalNo ratings yet
- ENGDAT1 Module1 PDFDocument34 pagesENGDAT1 Module1 PDFLawrence BelloNo ratings yet
- Huawei ETP4830Document68 pagesHuawei ETP4830x00No ratings yet
- Drawing - Boll & Kirch Filterbau GMBHDocument7 pagesDrawing - Boll & Kirch Filterbau GMBHolegmartynov90No ratings yet
- Lanjarón Viaduct - Spain: An Innovative Solution With VSL Heavy Lifting For Single Span BridgesDocument2 pagesLanjarón Viaduct - Spain: An Innovative Solution With VSL Heavy Lifting For Single Span BridgesLuis GomezNo ratings yet
- User Manual AC 22kw Double PlugsDocument21 pagesUser Manual AC 22kw Double PlugsParvizNo ratings yet
- Dissertation Research Aims and ObjectivesDocument7 pagesDissertation Research Aims and ObjectivesHelpWritingACollegePaperCanada100% (1)
- One Way Slab DesignDocument6 pagesOne Way Slab DesignLavender HoneyNo ratings yet
- A Comprehensive Survey On Authentication and Secure Key Management in Internet of ThingsDocument31 pagesA Comprehensive Survey On Authentication and Secure Key Management in Internet of ThingsEmmanuel Kayode FasinaNo ratings yet
- American National StandardDocument52 pagesAmerican National StandardALEX ROSARIO ANGELESNo ratings yet
- "About Mr. Slim Air Conditioners Training" For Pme Staff 21st September 2015Document165 pages"About Mr. Slim Air Conditioners Training" For Pme Staff 21st September 2015Tun Lin AungNo ratings yet
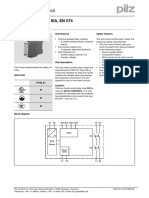
- P1HZ X1 enDocument6 pagesP1HZ X1 enDiiani AmayaNo ratings yet
- Cómo Escribir Un Ensayo para Las Vacaciones de VeranoDocument6 pagesCómo Escribir Un Ensayo para Las Vacaciones de Veranoafmofeesh100% (1)
- Environmental Management System ImplementationDocument40 pagesEnvironmental Management System Implementationkashif ManzoorNo ratings yet