Download as pdf or txt
You might also like
- Solution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFDocument170 pagesSolution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFAnonymous bZtJlFvPtpNo ratings yet
- Homework #4, Sec 11.1 and 11.2Document5 pagesHomework #4, Sec 11.1 and 11.2Masaya Sato100% (3)
- Advanced Accounting-Volume 2Document4 pagesAdvanced Accounting-Volume 2ronnelson pascual25% (16)
- Smart Time Special Edition Grade 12 Teachers Book Web1Document307 pagesSmart Time Special Edition Grade 12 Teachers Book Web1Thùy Linh PhùngNo ratings yet
- (ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaDocument82 pages(ADVANCE ABSTRACT ALGEBRA) Pankaj Kumar and Nawneet HoodaAnonymous RVVCJlDU6No ratings yet
- Case Incident OB MBADocument4 pagesCase Incident OB MBASahar Al-Jobury57% (7)
- Santiago Ca NEZDocument4 pagesSantiago Ca NEZSourav ShekharNo ratings yet
- MATH 2141 WK4 (1) Notes DR N SookiaDocument5 pagesMATH 2141 WK4 (1) Notes DR N SookiaAshvin GraceNo ratings yet
- 5 Linear Transformations: 5.1 Basic Definitions and ExamplesDocument10 pages5 Linear Transformations: 5.1 Basic Definitions and ExamplesBhimesh JettiNo ratings yet
- Linear MapsDocument15 pagesLinear MapsTom DavisNo ratings yet
- 1 Orthogonality and Orthonormality: Lecture 4: October 7, 2021Document3 pages1 Orthogonality and Orthonormality: Lecture 4: October 7, 2021Pushkaraj PanseNo ratings yet
- 2 Vector Spaces: V V V VDocument7 pages2 Vector Spaces: V V V Vaba3abaNo ratings yet
- Lectures On Linear AlgebraDocument101 pagesLectures On Linear AlgebraMaciej PogorzelskiNo ratings yet
- Linear Functional. Matrix Representation. Dual Space, Conjugate Space, Adjoint Space. Basis For Dual Space. Annihilator. Transpose of A Linear Mapping - PDFDocument3 pagesLinear Functional. Matrix Representation. Dual Space, Conjugate Space, Adjoint Space. Basis For Dual Space. Annihilator. Transpose of A Linear Mapping - PDFJEZEQUEL LoïcNo ratings yet
- Linear Algebra and Matrix Analysis: Vector SpacesDocument19 pagesLinear Algebra and Matrix Analysis: Vector SpacesShweta SridharNo ratings yet
- Lecture Notes 13: 2.9 The Covariant Derivative, Lie Bracket, and Rie-Mann Curvature Tensor of RDocument6 pagesLecture Notes 13: 2.9 The Covariant Derivative, Lie Bracket, and Rie-Mann Curvature Tensor of RSanjeev ShuklaNo ratings yet
- Linear AlgebraDocument18 pagesLinear AlgebraT BlackNo ratings yet
- Linear Algebra Cambridge Mathematical Tripos Part IBDocument58 pagesLinear Algebra Cambridge Mathematical Tripos Part IBharryNo ratings yet
- Vector SpacesDocument11 pagesVector Spacesdivya singhNo ratings yet
- ALL Minggu 5Document30 pagesALL Minggu 5Yosua Feri WijayaNo ratings yet
- Analysis ProblemDocument10 pagesAnalysis Problemmanasmondal5566No ratings yet
- 1 Self-Adjoint Transformations: Lecture 5: October 12, 2021Document4 pages1 Self-Adjoint Transformations: Lecture 5: October 12, 2021Pushkaraj PanseNo ratings yet
- Linear Algebra NotesDocument6 pagesLinear Algebra NotesBill E MoonNo ratings yet
- 1 Rayleigh Quotients: Eigenvalues As Optimization: Lecture 6: October 14, 2021Document4 pages1 Rayleigh Quotients: Eigenvalues As Optimization: Lecture 6: October 14, 2021Pushkaraj PanseNo ratings yet
- Dual SpaceDocument17 pagesDual SpaceAbhinaba MannaNo ratings yet
- 3501 HandoutsDocument41 pages3501 Handoutschoni singhNo ratings yet
- Spanning and Linear IndependenceDocument6 pagesSpanning and Linear IndependenceRoger PoolNo ratings yet
- 1 Linear Spaces: Summer Propaedeutic CourseDocument15 pages1 Linear Spaces: Summer Propaedeutic CourseJuan P HDNo ratings yet
- 76 - Sample - Chapter Kunci M2K3 No 9Document94 pages76 - Sample - Chapter Kunci M2K3 No 9Rachmat HidayatNo ratings yet
- Rosas-Ortiz: 1 Linear SpacesDocument20 pagesRosas-Ortiz: 1 Linear SpacesJaime TiburcioNo ratings yet
- Vector SpacesDocument4 pagesVector SpacesAaron WelsonNo ratings yet
- Adjoint OperatorsDocument4 pagesAdjoint OperatorsStephanie BushNo ratings yet
- 1 Lineartransformations: Linear TransformationDocument8 pages1 Lineartransformations: Linear TransformationSarit BurmanNo ratings yet
- Cambridge Part IB Linear Algebra Alex ChanDocument82 pagesCambridge Part IB Linear Algebra Alex ChanChung Chee YuenNo ratings yet
- The Spectral Theorem and Beyond: Guillaume Pouliot August 23, 2008Document19 pagesThe Spectral Theorem and Beyond: Guillaume Pouliot August 23, 2008Epic WinNo ratings yet
- Operations On Complex Vector Spaces 1.16 Direct Sums and HomomorphismsDocument5 pagesOperations On Complex Vector Spaces 1.16 Direct Sums and HomomorphismsOscar Alarcon CelyNo ratings yet
- 1 Eigenvalues and Eigenvectors: Lecture 3: October 5, 2021Document5 pages1 Eigenvalues and Eigenvectors: Lecture 3: October 5, 2021Pushkaraj PanseNo ratings yet
- Assignment-2 Name-Asha Kumari Jakhar Subject code-ECN511 Enrollment No.-20915003Document10 pagesAssignment-2 Name-Asha Kumari Jakhar Subject code-ECN511 Enrollment No.-20915003Asha JakharNo ratings yet
- MATH 423 Linear Algebra II Advanced Constructions of Vector SpacesDocument9 pagesMATH 423 Linear Algebra II Advanced Constructions of Vector SpacesYanh VissuetNo ratings yet
- Linear Algebra 3: Dual Spaces: Friday 3 November 2005Document8 pagesLinear Algebra 3: Dual Spaces: Friday 3 November 2005HariharanNo ratings yet
- 1 Lineartransformations: Linear TransformationDocument23 pages1 Lineartransformations: Linear TransformationSarit BurmanNo ratings yet
- Stefanie Gerke Based On Notes by James MckeeDocument2 pagesStefanie Gerke Based On Notes by James Mckeeecd4282003No ratings yet
- Lec# 4Document4 pagesLec# 4Batool MurtazaNo ratings yet
- A Bunch of ThingsDocument26 pagesA Bunch of ThingsMengyao MaNo ratings yet
- 5 Tensor ProductsDocument22 pages5 Tensor ProductsEmkafsNo ratings yet
- 2 Morphisms, Co-Ordinate Rings, Rational Maps, and Function FieldsDocument11 pages2 Morphisms, Co-Ordinate Rings, Rational Maps, and Function FieldsNacho IbarraNo ratings yet
- MA 106: Linear Algebra: J. K. Verma Department of Mathematics Indian Institute of Technology BombayDocument11 pagesMA 106: Linear Algebra: J. K. Verma Department of Mathematics Indian Institute of Technology Bombayjatin choudharyNo ratings yet
- CH 5 Vec & TenDocument40 pagesCH 5 Vec & TenDawit AmharaNo ratings yet
- AssignmentDocument6 pagesAssignmentBALARAM SAHUNo ratings yet
- Ij Ji: Typeset by Ams-TexDocument3 pagesIj Ji: Typeset by Ams-Texsalman suhailNo ratings yet
- Chapter 3 - Linear TransformationsDocument64 pagesChapter 3 - Linear TransformationsChristopherNo ratings yet
- 4 Linear Operators and Linear FunctionalsDocument7 pages4 Linear Operators and Linear FunctionalsAnees Ur RehmanNo ratings yet
- MTH 212 Summary To Be StudiedDocument16 pagesMTH 212 Summary To Be StudiedIsrael AdemolaNo ratings yet
- Summary of Lectures 02 Vector SpacesDocument3 pagesSummary of Lectures 02 Vector Spacesilyesinfo6No ratings yet
- Applied Linear Algebra: Problem Set-3: Instructor: Dwaipayan MukherjeeDocument2 pagesApplied Linear Algebra: Problem Set-3: Instructor: Dwaipayan Mukherjeejaswanth.varada26No ratings yet
- Chapter 4 - Linear TransformationsDocument24 pagesChapter 4 - Linear Transformationsyhs wsdwNo ratings yet
- Edinburgh Uni Algebra Exam NotesDocument7 pagesEdinburgh Uni Algebra Exam NotesSomeoneNo ratings yet
- 1 Vector Spaces: 1 2 K 1 1 2 2 K K I IDocument18 pages1 Vector Spaces: 1 2 K 1 1 2 2 K K I IKenny LauNo ratings yet
- 4 C7 C0 CF2 D 01Document14 pages4 C7 C0 CF2 D 01Dylan ChappNo ratings yet
- Assign 2Document10 pagesAssign 2Asha JakharNo ratings yet
- Repn Theory ExerciseDocument21 pagesRepn Theory ExerciseLuisNo ratings yet
- Tensor Fields 1Document3 pagesTensor Fields 1arthikkoNo ratings yet
- Bachelors ThesisDocument51 pagesBachelors Thesisabd 01No ratings yet
- 6.1 RelationsDocument10 pages6.1 Relationsabd 01No ratings yet
- Co-Evolution of Organizational Network and Individual Behavior: An Agent-Based Model of Interpersonal Knowledge TransferDocument21 pagesCo-Evolution of Organizational Network and Individual Behavior: An Agent-Based Model of Interpersonal Knowledge Transferabd 01No ratings yet
- David Nualart - Lecture-2Document54 pagesDavid Nualart - Lecture-2abd 01No ratings yet
- David Nualart - Lecture-1Document72 pagesDavid Nualart - Lecture-1abd 01No ratings yet
- Fundamental Approximation Theorems: Kunal Narayan ChaudhuryDocument4 pagesFundamental Approximation Theorems: Kunal Narayan Chaudhuryabd 01No ratings yet
- Ugly DucklingDocument18 pagesUgly DucklingMarliyza MamNo ratings yet
- Planning Your Trades: Risk Management RiskDocument2 pagesPlanning Your Trades: Risk Management RiskdoremonNo ratings yet
- National Certificate Ii - Optional Skill Module - Bread and Pastry Production PDFDocument116 pagesNational Certificate Ii - Optional Skill Module - Bread and Pastry Production PDFMicol Villaflor ÜNo ratings yet
- 01 Reading PTEDocument5 pages01 Reading PTEUsha ShresthaNo ratings yet
- History: About Kotak Mahindra BankDocument15 pagesHistory: About Kotak Mahindra BankVishal PawarNo ratings yet
- Word Families PDFDocument1 pageWord Families PDFAnastasia MeleshinaNo ratings yet
- A Presentation Digital T.V-An Innovation by AirtelDocument19 pagesA Presentation Digital T.V-An Innovation by AirtelkdkripaNo ratings yet
- AJAX Toolkit Developer Guide: Version 39.0, Spring '17Document48 pagesAJAX Toolkit Developer Guide: Version 39.0, Spring '17JagadeeshNo ratings yet
- Economics Class NotesDocument4 pagesEconomics Class NotesMadeleine ThomasNo ratings yet
- Comprehensive RubricDocument1 pageComprehensive Rubricartifactsmu4698No ratings yet
- Liliosa B Diasanta Marungko ApproachDocument67 pagesLiliosa B Diasanta Marungko ApproachLove Grace SenidoNo ratings yet
- Rooms DivisionDocument19 pagesRooms Divisionনিয়াজ মাহমুদNo ratings yet
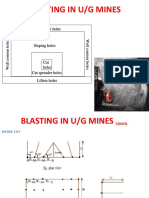
- Blasting in U/G Mines: Roof Contour Holes Roof Contour HolesDocument10 pagesBlasting in U/G Mines: Roof Contour Holes Roof Contour HolesSiddharth MukhillaNo ratings yet
- Exam Stratma PDFDocument178 pagesExam Stratma PDFGloria MalabananNo ratings yet
- Notre-Dame de ParisDocument1 pageNotre-Dame de ParisLaura Maria GalanNo ratings yet
- Manual m2x3 Enm b11Document94 pagesManual m2x3 Enm b11pondokjituNo ratings yet
- Olds Waste SonataDocument2 pagesOlds Waste SonataBecca RobertsNo ratings yet
- 0.1 Simple Pump Model Theory: n+1 N N n+1 NDocument4 pages0.1 Simple Pump Model Theory: n+1 N N n+1 NJack CavaluzziNo ratings yet
- Satisfaction On Tvs Brands With Reference To T V & Sons: A Study On CustomerDocument19 pagesSatisfaction On Tvs Brands With Reference To T V & Sons: A Study On CustomerRamya BalanNo ratings yet
- Exam Part 3Document56 pagesExam Part 3Mariel RosalesNo ratings yet
- Inspirations Fall 2013-11-04Document40 pagesInspirations Fall 2013-11-04karen_gn78786No ratings yet
- Bard NoteDocument20 pagesBard NoteAmulya Kumar SahuNo ratings yet
- Free Energy ProjectsDocument395 pagesFree Energy ProjectsDeepak Gore75% (4)
- Neurons and Synapses: Essential Idea: Neurons Transmit The Message, Synapses Modulate The MessageDocument26 pagesNeurons and Synapses: Essential Idea: Neurons Transmit The Message, Synapses Modulate The MessageSeanLaiNo ratings yet
- The Important of English in EducationDocument5 pagesThe Important of English in EducationSaya SyazrulNo ratings yet
- Potential Development of Substitute Products: Fred R. David Prentice Hall Ch.3-1Document17 pagesPotential Development of Substitute Products: Fred R. David Prentice Hall Ch.3-1Kashif ImranNo ratings yet
- Sinhala Quran Chapters 58 To 66Document66 pagesSinhala Quran Chapters 58 To 66Michael WestNo ratings yet