Download as pdf or txt
You might also like
- Solution Manual For Signals and Systems Using Matlab 3rd by ChaparroDocument38 pagesSolution Manual For Signals and Systems Using Matlab 3rd by Chaparroandrotomyboationv7fsf100% (28)
- A Project Report On Bridge RectifierDocument44 pagesA Project Report On Bridge RectifierTirthankar Mohanty43% (14)
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- Sheet 1Document2 pagesSheet 1ahmedmohamedn92No ratings yet
- NotesDocument9 pagesNotesAtharv AryaNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- 信號期中大抄Document2 pages信號期中大抄林昱呈No ratings yet
- Unit Impulse Overview - Unit Step - Switches - Unit Impulse - RelationshipsDocument13 pagesUnit Impulse Overview - Unit Step - Switches - Unit Impulse - RelationshipsSonia KanwalNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- Signals and Systems 02Document8 pagesSignals and Systems 02SamNo ratings yet
- ECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionDocument6 pagesECEN 314: Signals and Systems: 1 Continuous-Time ConvolutionJaanwar DeshNo ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Module-2: Tensor Calculus: Lecture-16: The Time Derivative and Some Integral TheoremsDocument7 pagesModule-2: Tensor Calculus: Lecture-16: The Time Derivative and Some Integral TheoremsHamza SiddiquiNo ratings yet
- CS Lecture 4Document29 pagesCS Lecture 4sadaf asmaNo ratings yet
- DSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Document22 pagesDSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Nigar QurbanovaNo ratings yet
- Eel2010 C28Document8 pagesEel2010 C28Dikshant Gupta (B21CI014)No ratings yet
- CH 09Document44 pagesCH 09KavunNo ratings yet
- The Dirac Delta Function and ConvolutionDocument7 pagesThe Dirac Delta Function and Convolutionmodi_modusNo ratings yet
- Ordinary Differential EquationsDocument37 pagesOrdinary Differential Equationsmoxima3638No ratings yet
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- !!en3 The Fourier Transform v02Document8 pages!!en3 The Fourier Transform v02Marcela DobreNo ratings yet
- Linear System TheoryDocument62 pagesLinear System TheoryadhomeworkNo ratings yet
- Introduction To Classical Linear Control SystemsDocument7 pagesIntroduction To Classical Linear Control SystemsDj OoNo ratings yet
- Handout 4: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertDocument7 pagesHandout 4: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertBryan YaranonNo ratings yet
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Continuous Time Fourier TransformDocument6 pagesContinuous Time Fourier TransformSameer KhanNo ratings yet
- Theory BGDocument49 pagesTheory BGpeloton10No ratings yet
- Dynamic Characteristics of Measurement SystemDocument43 pagesDynamic Characteristics of Measurement SystemMedo Hamed0% (1)
- Frequency Domain Analysis of Dynamic Systems: Jos E C. GeromelDocument43 pagesFrequency Domain Analysis of Dynamic Systems: Jos E C. Geromelblister_xbladeNo ratings yet
- Math221: HW# 2 Solutions: Andy Royston October 12, 2005Document12 pagesMath221: HW# 2 Solutions: Andy Royston October 12, 2005Zahid KumailNo ratings yet
- Signals and Networks (SEE 2043) Lecture #2: Topics CoveredDocument24 pagesSignals and Networks (SEE 2043) Lecture #2: Topics CoveredIzlaikha AzizNo ratings yet
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengNo ratings yet
- Signals Basic TypesDocument7 pagesSignals Basic TypesJunaid KaleemNo ratings yet
- Tables of Common Transform Pairs: Notation, Conventions, and Useful FormulasDocument6 pagesTables of Common Transform Pairs: Notation, Conventions, and Useful FormulassisoNo ratings yet
- Signals and SystemsDocument12 pagesSignals and SystemsTman DokodaNo ratings yet
- Study Unit 2Document15 pagesStudy Unit 2Gontse SempaNo ratings yet
- Formula Sheet Midterm 222Document2 pagesFormula Sheet Midterm 222NawwafNo ratings yet
- Bandpass Receiver StructuresDocument4 pagesBandpass Receiver Structures朱柏林No ratings yet
- Signal & Systems-DONEDocument40 pagesSignal & Systems-DONEnavNo ratings yet
- 1 Characteristics of Time Series 1.3 Measures of DependenceDocument10 pages1 Characteristics of Time Series 1.3 Measures of DependenceTrịnh TâmNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremKirubasri SNo ratings yet
- EEE 303 HW # 1 SolutionsDocument22 pagesEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNo ratings yet
- Convolution and Correlation - TutorialspointDocument12 pagesConvolution and Correlation - TutorialspointSavita BhosleNo ratings yet
- Unit3 Phase Noise in Differential LC OscillatorDocument28 pagesUnit3 Phase Noise in Differential LC OscillatorRama Narmada MNo ratings yet
- Half Wave Symmetry 4Document2 pagesHalf Wave Symmetry 4hussain ghaziNo ratings yet
- Tabla Derivadas e IntegralesDocument2 pagesTabla Derivadas e IntegralespatvelizNo ratings yet
- تحليلات 1 2 3Document27 pagesتحليلات 1 2 3توحد الأديانNo ratings yet
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Document11 pagesFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNo ratings yet
- Continuous-Time Unit Impulse: Ilya Pollak ECE 301 Signals and Systems Section 2, Fall 2010 Purdue UniversityDocument4 pagesContinuous-Time Unit Impulse: Ilya Pollak ECE 301 Signals and Systems Section 2, Fall 2010 Purdue UniversityAnirban SahaNo ratings yet
- Exponential Distribution: Most Widely Used Probability Distribution in Reliability AssessmentDocument5 pagesExponential Distribution: Most Widely Used Probability Distribution in Reliability AssessmentKrishna Kumar AlagarNo ratings yet
- Sistemas SinalesDocument43 pagesSistemas SinalesAlfonso LugoNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- Signals Systems PDFDocument93 pagesSignals Systems PDFrohithNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremBhuvan Susheel MekaNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 2019 20 Placement Details - WebsiteDocument23 pages2019 20 Placement Details - WebsiteSuyash SinghNo ratings yet
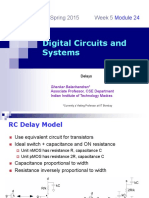
- Digital Circuits and Systems: Spring 2015 Week 5Document11 pagesDigital Circuits and Systems: Spring 2015 Week 5Suyash SinghNo ratings yet
- Wideband Array Processing Using A Two-Sided Correlation TransformationDocument13 pagesWideband Array Processing Using A Two-Sided Correlation TransformationSuyash SinghNo ratings yet
- Smart Power Theft Detection Using Arduino and GSM ModuleDocument7 pagesSmart Power Theft Detection Using Arduino and GSM ModuleSuyash SinghNo ratings yet
- Torrent Downloaded From 1337x.toDocument1 pageTorrent Downloaded From 1337x.toSuyash SinghNo ratings yet
- ) 1 (1 ) 1 (1 ) 2 (Cos 1 ) 2 (Cos 1 ) 2 (Cos 1 ) (Cos 1 ) (Cos 1 0) 1 (1 2) 1 (1 2) 1 (1 2) 1 (1Document16 pages) 1 (1 ) 1 (1 ) 2 (Cos 1 ) 2 (Cos 1 ) 2 (Cos 1 ) (Cos 1 ) (Cos 1 0) 1 (1 2) 1 (1 2) 1 (1 2) 1 (1Suyash SinghNo ratings yet
- KJHDocument60 pagesKJHSuyash SinghNo ratings yet
- Sonal BiodataDocument4 pagesSonal BiodataSuyash SinghNo ratings yet
- E!R /K A: Gtoest TDocument24 pagesE!R /K A: Gtoest TSuyash SinghNo ratings yet
- Handwritten Character Recognition Using BP NN, LAMSTAR NN and SVMDocument72 pagesHandwritten Character Recognition Using BP NN, LAMSTAR NN and SVMSuyash SinghNo ratings yet
- Admit Card: Examination Centre: Centre CodeDocument1 pageAdmit Card: Examination Centre: Centre CodeSuyash SinghNo ratings yet
- Sonal BiodataDocument4 pagesSonal BiodataSuyash SinghNo ratings yet
- Dec Resume PDFDocument2 pagesDec Resume PDFSuyash SinghNo ratings yet
- Outage Trip LinkageDocument64 pagesOutage Trip LinkageSuyash SinghNo ratings yet
- AC - to-DC Converters (Uncontrolled Rectifiers)Document13 pagesAC - to-DC Converters (Uncontrolled Rectifiers)Luthfan AzizanNo ratings yet
- Time Delay Relay Module XY-J02: Product FeaturesDocument4 pagesTime Delay Relay Module XY-J02: Product FeaturesDaniel BauerNo ratings yet
- Lge 42LV4400 PDFDocument137 pagesLge 42LV4400 PDFtran nhat namNo ratings yet
- ITI Smaash BrocDocument2 pagesITI Smaash BrocPonmalai SNo ratings yet
- Lic-Model ExamDocument1 pageLic-Model ExamarivasanthNo ratings yet
- Introduction To The Power Electronics SystemDocument8 pagesIntroduction To The Power Electronics SystemNedaa AltawalbehNo ratings yet
- Power Line CommunicationDocument41 pagesPower Line Communicationnipunkhatri100% (1)
- LF DPR1200B-48 enDocument2 pagesLF DPR1200B-48 enRaed Al-HajNo ratings yet
- FlexScan EV-3237 UsermanualDocument79 pagesFlexScan EV-3237 UsermanualDung NguyenNo ratings yet
- DR-3000 Basic Service Manual 2007Document61 pagesDR-3000 Basic Service Manual 2007jlehmann6274100% (1)
- 555 Hysteretic Oscillator Parts and MaterialsDocument18 pages555 Hysteretic Oscillator Parts and MaterialsMichael Cabrera RabinoNo ratings yet
- Computer GraphicDocument11 pagesComputer GraphicKidus SeleshiNo ratings yet
- 17ips19 5 PDFDocument4 pages17ips19 5 PDFgooheeNo ratings yet
- Monolithic Voltage-Controlled Oscillators: General Description FeaturesDocument6 pagesMonolithic Voltage-Controlled Oscillators: General Description FeaturesGerard PabloNo ratings yet
- Varistores Uxell DatasheetDocument4 pagesVaristores Uxell DatasheetJorge Adalberto Lugo QuinteroNo ratings yet
- Hardwired Line Follower Autonomous Robot ManualDocument10 pagesHardwired Line Follower Autonomous Robot ManualSupratim DasNo ratings yet
- Thesis Yizhe 11 May 2019 PDFDocument108 pagesThesis Yizhe 11 May 2019 PDFAhmed EmadNo ratings yet
- Krest EEE Mini ProjectsDocument6 pagesKrest EEE Mini ProjectsAtul KumarNo ratings yet
- Basic Electrical EngineeringDocument145 pagesBasic Electrical EngineeringAkash GolwalkarNo ratings yet
- 5709C PB02 RDocument2 pages5709C PB02 RMarcel MagnoNo ratings yet
- CommunicationDocument310 pagesCommunicationneverheardofit0% (1)
- Motorola BTS Course Tarining (M - Cell 6, Horizon & Horizon II)Document42 pagesMotorola BTS Course Tarining (M - Cell 6, Horizon & Horizon II)Rami OmeiraNo ratings yet
- Nokia Flexihopper (Plus) Radio Installation: 1 © Nokia CTXX 4807/4.0en - PPT/ 12-2005 / LDB-CVDocument81 pagesNokia Flexihopper (Plus) Radio Installation: 1 © Nokia CTXX 4807/4.0en - PPT/ 12-2005 / LDB-CVniks_26_19875852No ratings yet
- 1k I 6747 WD RevDocument57 pages1k I 6747 WD RevJonathan FuentesNo ratings yet
- Elex 2L Prelim ExamDocument3 pagesElex 2L Prelim ExamMidas Troy VictorNo ratings yet
- Datasheet IRFP32N50KDocument8 pagesDatasheet IRFP32N50KWilson Yecit OrtizNo ratings yet
- 1 - Number System and Digital LogicDocument34 pages1 - Number System and Digital LogicHasib Hamidul HaqueNo ratings yet
- UPF & Special Cells Used For Power Planning - VLSI - Physical Design For FreshersDocument4 pagesUPF & Special Cells Used For Power Planning - VLSI - Physical Design For FreshersRA NDYNo ratings yet
- Electrical Part ListDocument28 pagesElectrical Part ListIntel_Pentium_INo ratings yet