
Engine Knock Signal Processor Features: Ordering Information
Engine Knock Signal Processor Features: Ordering Information
You might also like
- Baylor ManualDocument28 pagesBaylor ManualEliecer Diaz100% (3)
- Anonymous - The Noob GuideDocument6 pagesAnonymous - The Noob GuideAmicoChips22No ratings yet
- Teac MC DX10 Service ManualDocument26 pagesTeac MC DX10 Service ManualVaishakNo ratings yet
- Power Electronics Typical Solved ProblemsDocument10 pagesPower Electronics Typical Solved Problemsaprilswapnil0% (1)
- REN Hip9011 DST 19981007Document11 pagesREN Hip9011 DST 19981007hua021028No ratings yet
- TPIC8101 Knock Sensor Interface: 1 Features 3 DescriptionDocument26 pagesTPIC8101 Knock Sensor Interface: 1 Features 3 DescriptionRogério MorenoNo ratings yet
- 67 MSPS Digital Receive Signal Processor: P Port, Serial PortDocument5 pages67 MSPS Digital Receive Signal Processor: P Port, Serial PortEliezer Peña del AguilaNo ratings yet
- Pic16f1717 Datasheet PDFDocument483 pagesPic16f1717 Datasheet PDFShyam Thillainathan0% (1)
- PIC16F1717Document486 pagesPIC16F1717angel.fonsecaNo ratings yet
- KS 94 DatasheetDocument8 pagesKS 94 Datasheetbaananou nizarNo ratings yet
- PCM 1716Document14 pagesPCM 1716Phạm Văn BằngNo ratings yet
- PCM1716E and PCM1716E 2KDocument15 pagesPCM1716E and PCM1716E 2KSergiu CretuNo ratings yet
- InfoI Tercer Parcial ResueltoDocument454 pagesInfoI Tercer Parcial ResueltoRodrigo DíazNo ratings yet
- PIC16F1713Document450 pagesPIC16F1713Динко КънчевNo ratings yet
- CS5490 F3Document57 pagesCS5490 F3iqbalNo ratings yet
- TB67H400AHG: PWM Chopper-TypeDocument23 pagesTB67H400AHG: PWM Chopper-Typegeneric111No ratings yet
- PIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersDocument472 pagesPIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersGabriel VillanuevaNo ratings yet
- For Ghic Only: High-Performance 6-Axis Mems Motiontracking™ DeviceDocument59 pagesFor Ghic Only: High-Performance 6-Axis Mems Motiontracking™ DeviceNuno CarriçoNo ratings yet
- Dynamix 2500 Technical SpecDocument6 pagesDynamix 2500 Technical SpecJavier RiveraNo ratings yet
- Ads 131 M 04Document105 pagesAds 131 M 04Gustavo Carlos da SilvaNo ratings yet
- Tds 0005Document2 pagesTds 0005computerparadise1993No ratings yet
- ATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICDocument14 pagesATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICSakthivel PNo ratings yet
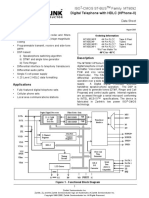
- Digital Telephone With HDLC (Hphone-Ii) : FeaturesDocument49 pagesDigital Telephone With HDLC (Hphone-Ii) : Featureseye4aneye1989No ratings yet
- 36350Document15 pages36350Testman ManNo ratings yet
- FLUKE 192B DatasheetDocument9 pagesFLUKE 192B Datasheetm.etNo ratings yet
- Bueno Eml 40ps Normaxgpon Onet1141lDocument32 pagesBueno Eml 40ps Normaxgpon Onet1141lJ. M. M.No ratings yet
- PCM56P PCM56U: FeaturesDocument18 pagesPCM56P PCM56U: Featurestrinh_anhtuNo ratings yet
- Silcopac D: Hardware SOFTWARE Basic Version BDocument2 pagesSilcopac D: Hardware SOFTWARE Basic Version BGerardo BaltaNo ratings yet
- LMP91300 Industrial Inductive Proximity Sensor AFE: 1 Features 3 DescriptionDocument44 pagesLMP91300 Industrial Inductive Proximity Sensor AFE: 1 Features 3 DescriptionYovi Herlin SaputraNo ratings yet
- Programmable Logic Controller: This Datasheet Has Been Downloaded From at ThisDocument12 pagesProgrammable Logic Controller: This Datasheet Has Been Downloaded From at ThisEmanuel NavasNo ratings yet
- PIC16F18877Document671 pagesPIC16F18877Marcio FreitasNo ratings yet
- Pic12f1571 PDFDocument334 pagesPic12f1571 PDFazuanr830No ratings yet
- PIC16LF1885777 Data Sheet 40001825FDocument668 pagesPIC16LF1885777 Data Sheet 40001825FfaujohnNo ratings yet
- T Ratta RateDocument452 pagesT Ratta RateedgarNo ratings yet
- Data Sheet Pic 16 F 18875Document674 pagesData Sheet Pic 16 F 18875Sound AplicacionNo ratings yet
- UART sc16c750Document45 pagesUART sc16c750msx68kNo ratings yet
- HX711 Avia SemiconductorDocument9 pagesHX711 Avia SemiconductorAnjar Bangsa MimpiNo ratings yet
- RFM12 Guide PDFDocument31 pagesRFM12 Guide PDFMariuszChreptakNo ratings yet
- CMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Document4 pagesCMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Marcos DiazNo ratings yet
- Energy Metering IC With SPI Interface and Active Power Pulse OutputDocument44 pagesEnergy Metering IC With SPI Interface and Active Power Pulse Outputiskandarn_el5735No ratings yet
- MCP39F511A Data Sheet 20006044ADocument68 pagesMCP39F511A Data Sheet 20006044ALuis Enrique CorzoNo ratings yet
- LM 5122Document56 pagesLM 5122Ramazan AltunNo ratings yet
- 3 NC 154602Document9 pages3 NC 154602Janusz StangeljNo ratings yet
- TDA10046HT: Single-Chip DVB-T Channel DecoderDocument4 pagesTDA10046HT: Single-Chip DVB-T Channel DecodertugazonaNo ratings yet
- Efm8lb1 RMDocument394 pagesEfm8lb1 RMlingNo ratings yet
- 16-Channel, 16-Bit Analog-to-Digital Converter: Features DescriptionDocument52 pages16-Channel, 16-Bit Analog-to-Digital Converter: Features Descriptiontony starkNo ratings yet
- Screenshot 2021-08-14 at 4.22.14 PMDocument471 pagesScreenshot 2021-08-14 at 4.22.14 PMSaleh M.IbrahimNo ratings yet
- LMR 16020Document36 pagesLMR 16020m3rishorNo ratings yet
- Order Tracking Program CAT-SAA1-ORDTRK Datasheet 1603-1Document2 pagesOrder Tracking Program CAT-SAA1-ORDTRK Datasheet 1603-1SamirNo ratings yet
- CP-VAV-U - ComfortPoint - Unitary ControllerDocument4 pagesCP-VAV-U - ComfortPoint - Unitary ControllerDinesh ChandranNo ratings yet
- PLCDocument12 pagesPLCIsmail HussainNo ratings yet
- Advanced Ultrasonic Flaw Detectors With Phased Array ImagingDocument16 pagesAdvanced Ultrasonic Flaw Detectors With Phased Array ImagingDebye101No ratings yet
- AS44CE37x - RF Modulator ICDocument2 pagesAS44CE37x - RF Modulator ICropay61705No ratings yet
- NE5034Document6 pagesNE5034teguh.setionoNo ratings yet
- TLV320AIC3204 Datasheet PDFDocument45 pagesTLV320AIC3204 Datasheet PDFSourabh SuriNo ratings yet
- NVP6134C DatasheetDocument93 pagesNVP6134C DatasheetOldman TestNo ratings yet
- Digital Avr For Alternators With Shunt, Arep or PMG ExcitationDocument2 pagesDigital Avr For Alternators With Shunt, Arep or PMG ExcitationParinyaNo ratings yet
- Multisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsFrom EverandMultisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsNo ratings yet
- Multimedia Signal Processing: Theory and Applications in Speech, Music and CommunicationsFrom EverandMultimedia Signal Processing: Theory and Applications in Speech, Music and CommunicationsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- I2C - Learn - SparkfunDocument6 pagesI2C - Learn - SparkfunpradozuritaNo ratings yet
- AMI Semiconductor Semiconductor Solutions For The Real WorldDocument21 pagesAMI Semiconductor Semiconductor Solutions For The Real WorldpradozuritaNo ratings yet
- A Review of Implementing ADC in RFID SensorDocument15 pagesA Review of Implementing ADC in RFID SensorpradozuritaNo ratings yet
- Differential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithDocument17 pagesDifferential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithpradozuritaNo ratings yet
- 2010 6 TechReviewDocument12 pages2010 6 TechReviewpradozuritaNo ratings yet
- (An Autonomous Institute) (An Autonomous Institute)Document8 pages(An Autonomous Institute) (An Autonomous Institute)Sanjana SNo ratings yet
- What Is @DataJpaTestAnnotations and Spring Boot Unit Testing Repository LayerDocument16 pagesWhat Is @DataJpaTestAnnotations and Spring Boot Unit Testing Repository LayerSourabh JainNo ratings yet
- c83d0c93-a70a-48c8-b27f-bcc93f4cd389Document6 pagesc83d0c93-a70a-48c8-b27f-bcc93f4cd389Swamy Dhas DhasNo ratings yet
- Concepts of AppletsDocument15 pagesConcepts of AppletsupscnavigatorNo ratings yet
- Image Processing On FPGA Using Verilog HDL - FPGA4studentDocument16 pagesImage Processing On FPGA Using Verilog HDL - FPGA4studentgottdammer100% (1)
- Xda-Developers - SECRET CODES - Omnia 2 GT-i8000 PDFDocument3 pagesXda-Developers - SECRET CODES - Omnia 2 GT-i8000 PDFM Arshad Iqbal HarralNo ratings yet
- Steering - Boxes w124Document2 pagesSteering - Boxes w124alberto.caravelleNo ratings yet
- OilChange DV6Document1 pageOilChange DV6ismael23No ratings yet
- FOC Practical Question SetDocument4 pagesFOC Practical Question SetShankarNo ratings yet
- Template Work For ProjectDocument29 pagesTemplate Work For ProjectDENNIS AMANKWAHNo ratings yet
- FMG31R Thru FMG36R: PB Free Plating ProductDocument3 pagesFMG31R Thru FMG36R: PB Free Plating ProductTspi RitzelNo ratings yet
- GADGopalpurROB1 3kmDocument2 pagesGADGopalpurROB1 3kmAnurag sharmaNo ratings yet
- USACE Civil 3D Template Presentation 2018Document29 pagesUSACE Civil 3D Template Presentation 2018bcs22102No ratings yet
- Gazepoint Quick StartDocument3 pagesGazepoint Quick StarteversonfrancaNo ratings yet
- Reflection Paper Business SummitDocument1 pageReflection Paper Business Summitdianne ericka YeeNo ratings yet
- Plan 2Document25 pagesPlan 2Dan DannyNo ratings yet
- Advanced Certification in DevOps Cloud ComputingDocument14 pagesAdvanced Certification in DevOps Cloud ComputingIshant TayalNo ratings yet
- Briggs - Illustrated Parts ListDocument31 pagesBriggs - Illustrated Parts ListronNo ratings yet
- JRF - Resize FilesDocument1 pageJRF - Resize FilesConcern ShokoNo ratings yet
- Data Backup and Disaster Recovery in The Cloud: February 2024Document20 pagesData Backup and Disaster Recovery in The Cloud: February 2024shaniahNo ratings yet
- Bootstrapping Machine Learning v0 2 SampleDocument42 pagesBootstrapping Machine Learning v0 2 SampleSoumya RanjanNo ratings yet
- Objectives of Digital BankingDocument10 pagesObjectives of Digital BankingGourav jamwalNo ratings yet
- 9akk106354a3359 Emergi-Lite Uk 2020 CT DGTDocument152 pages9akk106354a3359 Emergi-Lite Uk 2020 CT DGTOjog Ciprian AlinNo ratings yet
- Brochure - E-RTG ElectrificationDocument12 pagesBrochure - E-RTG Electrification003086No ratings yet
- En Iso 9712 - 2013Document42 pagesEn Iso 9712 - 2013alilka404No ratings yet
- Yanmar SA221 Tractor BrochureDocument2 pagesYanmar SA221 Tractor BrochureAnastasiya DorfmanNo ratings yet





























































































Download as pdf or txt
You might also like
- Baylor ManualDocument28 pagesBaylor ManualEliecer Diaz100% (3)
- Anonymous - The Noob GuideDocument6 pagesAnonymous - The Noob GuideAmicoChips22No ratings yet
- Teac MC DX10 Service ManualDocument26 pagesTeac MC DX10 Service ManualVaishakNo ratings yet
- Power Electronics Typical Solved ProblemsDocument10 pagesPower Electronics Typical Solved Problemsaprilswapnil0% (1)
- REN Hip9011 DST 19981007Document11 pagesREN Hip9011 DST 19981007hua021028No ratings yet
- TPIC8101 Knock Sensor Interface: 1 Features 3 DescriptionDocument26 pagesTPIC8101 Knock Sensor Interface: 1 Features 3 DescriptionRogério MorenoNo ratings yet
- 67 MSPS Digital Receive Signal Processor: P Port, Serial PortDocument5 pages67 MSPS Digital Receive Signal Processor: P Port, Serial PortEliezer Peña del AguilaNo ratings yet
- Pic16f1717 Datasheet PDFDocument483 pagesPic16f1717 Datasheet PDFShyam Thillainathan0% (1)
- PIC16F1717Document486 pagesPIC16F1717angel.fonsecaNo ratings yet
- KS 94 DatasheetDocument8 pagesKS 94 Datasheetbaananou nizarNo ratings yet
- PCM 1716Document14 pagesPCM 1716Phạm Văn BằngNo ratings yet
- PCM1716E and PCM1716E 2KDocument15 pagesPCM1716E and PCM1716E 2KSergiu CretuNo ratings yet
- InfoI Tercer Parcial ResueltoDocument454 pagesInfoI Tercer Parcial ResueltoRodrigo DíazNo ratings yet
- PIC16F1713Document450 pagesPIC16F1713Динко КънчевNo ratings yet
- CS5490 F3Document57 pagesCS5490 F3iqbalNo ratings yet
- TB67H400AHG: PWM Chopper-TypeDocument23 pagesTB67H400AHG: PWM Chopper-Typegeneric111No ratings yet
- PIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersDocument472 pagesPIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersGabriel VillanuevaNo ratings yet
- For Ghic Only: High-Performance 6-Axis Mems Motiontracking™ DeviceDocument59 pagesFor Ghic Only: High-Performance 6-Axis Mems Motiontracking™ DeviceNuno CarriçoNo ratings yet
- Dynamix 2500 Technical SpecDocument6 pagesDynamix 2500 Technical SpecJavier RiveraNo ratings yet
- Ads 131 M 04Document105 pagesAds 131 M 04Gustavo Carlos da SilvaNo ratings yet
- Tds 0005Document2 pagesTds 0005computerparadise1993No ratings yet
- ATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICDocument14 pagesATS601LSG: Single-Element Tooth-Detecting Speed Sensor ICSakthivel PNo ratings yet
- Digital Telephone With HDLC (Hphone-Ii) : FeaturesDocument49 pagesDigital Telephone With HDLC (Hphone-Ii) : Featureseye4aneye1989No ratings yet
- 36350Document15 pages36350Testman ManNo ratings yet
- FLUKE 192B DatasheetDocument9 pagesFLUKE 192B Datasheetm.etNo ratings yet
- Bueno Eml 40ps Normaxgpon Onet1141lDocument32 pagesBueno Eml 40ps Normaxgpon Onet1141lJ. M. M.No ratings yet
- PCM56P PCM56U: FeaturesDocument18 pagesPCM56P PCM56U: Featurestrinh_anhtuNo ratings yet
- Silcopac D: Hardware SOFTWARE Basic Version BDocument2 pagesSilcopac D: Hardware SOFTWARE Basic Version BGerardo BaltaNo ratings yet
- LMP91300 Industrial Inductive Proximity Sensor AFE: 1 Features 3 DescriptionDocument44 pagesLMP91300 Industrial Inductive Proximity Sensor AFE: 1 Features 3 DescriptionYovi Herlin SaputraNo ratings yet
- Programmable Logic Controller: This Datasheet Has Been Downloaded From at ThisDocument12 pagesProgrammable Logic Controller: This Datasheet Has Been Downloaded From at ThisEmanuel NavasNo ratings yet
- PIC16F18877Document671 pagesPIC16F18877Marcio FreitasNo ratings yet
- Pic12f1571 PDFDocument334 pagesPic12f1571 PDFazuanr830No ratings yet
- PIC16LF1885777 Data Sheet 40001825FDocument668 pagesPIC16LF1885777 Data Sheet 40001825FfaujohnNo ratings yet
- T Ratta RateDocument452 pagesT Ratta RateedgarNo ratings yet
- Data Sheet Pic 16 F 18875Document674 pagesData Sheet Pic 16 F 18875Sound AplicacionNo ratings yet
- UART sc16c750Document45 pagesUART sc16c750msx68kNo ratings yet
- HX711 Avia SemiconductorDocument9 pagesHX711 Avia SemiconductorAnjar Bangsa MimpiNo ratings yet
- RFM12 Guide PDFDocument31 pagesRFM12 Guide PDFMariuszChreptakNo ratings yet
- CMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Document4 pagesCMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Marcos DiazNo ratings yet
- Energy Metering IC With SPI Interface and Active Power Pulse OutputDocument44 pagesEnergy Metering IC With SPI Interface and Active Power Pulse Outputiskandarn_el5735No ratings yet
- MCP39F511A Data Sheet 20006044ADocument68 pagesMCP39F511A Data Sheet 20006044ALuis Enrique CorzoNo ratings yet
- LM 5122Document56 pagesLM 5122Ramazan AltunNo ratings yet
- 3 NC 154602Document9 pages3 NC 154602Janusz StangeljNo ratings yet
- TDA10046HT: Single-Chip DVB-T Channel DecoderDocument4 pagesTDA10046HT: Single-Chip DVB-T Channel DecodertugazonaNo ratings yet
- Efm8lb1 RMDocument394 pagesEfm8lb1 RMlingNo ratings yet
- 16-Channel, 16-Bit Analog-to-Digital Converter: Features DescriptionDocument52 pages16-Channel, 16-Bit Analog-to-Digital Converter: Features Descriptiontony starkNo ratings yet
- Screenshot 2021-08-14 at 4.22.14 PMDocument471 pagesScreenshot 2021-08-14 at 4.22.14 PMSaleh M.IbrahimNo ratings yet
- LMR 16020Document36 pagesLMR 16020m3rishorNo ratings yet
- Order Tracking Program CAT-SAA1-ORDTRK Datasheet 1603-1Document2 pagesOrder Tracking Program CAT-SAA1-ORDTRK Datasheet 1603-1SamirNo ratings yet
- CP-VAV-U - ComfortPoint - Unitary ControllerDocument4 pagesCP-VAV-U - ComfortPoint - Unitary ControllerDinesh ChandranNo ratings yet
- PLCDocument12 pagesPLCIsmail HussainNo ratings yet
- Advanced Ultrasonic Flaw Detectors With Phased Array ImagingDocument16 pagesAdvanced Ultrasonic Flaw Detectors With Phased Array ImagingDebye101No ratings yet
- AS44CE37x - RF Modulator ICDocument2 pagesAS44CE37x - RF Modulator ICropay61705No ratings yet
- NE5034Document6 pagesNE5034teguh.setionoNo ratings yet
- TLV320AIC3204 Datasheet PDFDocument45 pagesTLV320AIC3204 Datasheet PDFSourabh SuriNo ratings yet
- NVP6134C DatasheetDocument93 pagesNVP6134C DatasheetOldman TestNo ratings yet
- Digital Avr For Alternators With Shunt, Arep or PMG ExcitationDocument2 pagesDigital Avr For Alternators With Shunt, Arep or PMG ExcitationParinyaNo ratings yet
- Multisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsFrom EverandMultisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsNo ratings yet
- Multimedia Signal Processing: Theory and Applications in Speech, Music and CommunicationsFrom EverandMultimedia Signal Processing: Theory and Applications in Speech, Music and CommunicationsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- I2C - Learn - SparkfunDocument6 pagesI2C - Learn - SparkfunpradozuritaNo ratings yet
- AMI Semiconductor Semiconductor Solutions For The Real WorldDocument21 pagesAMI Semiconductor Semiconductor Solutions For The Real WorldpradozuritaNo ratings yet
- A Review of Implementing ADC in RFID SensorDocument15 pagesA Review of Implementing ADC in RFID SensorpradozuritaNo ratings yet
- Differential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithDocument17 pagesDifferential Amplifiers: ES 330 Electronics II Chapter 8 Sedra & SmithpradozuritaNo ratings yet
- 2010 6 TechReviewDocument12 pages2010 6 TechReviewpradozuritaNo ratings yet
- (An Autonomous Institute) (An Autonomous Institute)Document8 pages(An Autonomous Institute) (An Autonomous Institute)Sanjana SNo ratings yet
- What Is @DataJpaTestAnnotations and Spring Boot Unit Testing Repository LayerDocument16 pagesWhat Is @DataJpaTestAnnotations and Spring Boot Unit Testing Repository LayerSourabh JainNo ratings yet
- c83d0c93-a70a-48c8-b27f-bcc93f4cd389Document6 pagesc83d0c93-a70a-48c8-b27f-bcc93f4cd389Swamy Dhas DhasNo ratings yet
- Concepts of AppletsDocument15 pagesConcepts of AppletsupscnavigatorNo ratings yet
- Image Processing On FPGA Using Verilog HDL - FPGA4studentDocument16 pagesImage Processing On FPGA Using Verilog HDL - FPGA4studentgottdammer100% (1)
- Xda-Developers - SECRET CODES - Omnia 2 GT-i8000 PDFDocument3 pagesXda-Developers - SECRET CODES - Omnia 2 GT-i8000 PDFM Arshad Iqbal HarralNo ratings yet
- Steering - Boxes w124Document2 pagesSteering - Boxes w124alberto.caravelleNo ratings yet
- OilChange DV6Document1 pageOilChange DV6ismael23No ratings yet
- FOC Practical Question SetDocument4 pagesFOC Practical Question SetShankarNo ratings yet
- Template Work For ProjectDocument29 pagesTemplate Work For ProjectDENNIS AMANKWAHNo ratings yet
- FMG31R Thru FMG36R: PB Free Plating ProductDocument3 pagesFMG31R Thru FMG36R: PB Free Plating ProductTspi RitzelNo ratings yet
- GADGopalpurROB1 3kmDocument2 pagesGADGopalpurROB1 3kmAnurag sharmaNo ratings yet
- USACE Civil 3D Template Presentation 2018Document29 pagesUSACE Civil 3D Template Presentation 2018bcs22102No ratings yet
- Gazepoint Quick StartDocument3 pagesGazepoint Quick StarteversonfrancaNo ratings yet
- Reflection Paper Business SummitDocument1 pageReflection Paper Business Summitdianne ericka YeeNo ratings yet
- Plan 2Document25 pagesPlan 2Dan DannyNo ratings yet
- Advanced Certification in DevOps Cloud ComputingDocument14 pagesAdvanced Certification in DevOps Cloud ComputingIshant TayalNo ratings yet
- Briggs - Illustrated Parts ListDocument31 pagesBriggs - Illustrated Parts ListronNo ratings yet
- JRF - Resize FilesDocument1 pageJRF - Resize FilesConcern ShokoNo ratings yet
- Data Backup and Disaster Recovery in The Cloud: February 2024Document20 pagesData Backup and Disaster Recovery in The Cloud: February 2024shaniahNo ratings yet
- Bootstrapping Machine Learning v0 2 SampleDocument42 pagesBootstrapping Machine Learning v0 2 SampleSoumya RanjanNo ratings yet
- Objectives of Digital BankingDocument10 pagesObjectives of Digital BankingGourav jamwalNo ratings yet
- 9akk106354a3359 Emergi-Lite Uk 2020 CT DGTDocument152 pages9akk106354a3359 Emergi-Lite Uk 2020 CT DGTOjog Ciprian AlinNo ratings yet
- Brochure - E-RTG ElectrificationDocument12 pagesBrochure - E-RTG Electrification003086No ratings yet
- En Iso 9712 - 2013Document42 pagesEn Iso 9712 - 2013alilka404No ratings yet
- Yanmar SA221 Tractor BrochureDocument2 pagesYanmar SA221 Tractor BrochureAnastasiya DorfmanNo ratings yet