Download as pdf or txt
You might also like
- Dynamic Modeling Using Aspen HYSYS® For Oil and Gas - Course Number EB1105.06.04Document205 pagesDynamic Modeling Using Aspen HYSYS® For Oil and Gas - Course Number EB1105.06.04Kumar100% (6)
- Manual Liberty SelectDocument2 pagesManual Liberty SelectMarcos AcioliNo ratings yet
- Revenue and Support CenterDocument3 pagesRevenue and Support CenterEphraim Boadu0% (1)
- Processes 09 02205 v3Document14 pagesProcesses 09 02205 v3suliat ikudaisiNo ratings yet
- Coordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperDocument9 pagesCoordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperPasinduNo ratings yet
- Article AJSSDocument10 pagesArticle AJSSsmasher786420No ratings yet
- Artificial Intelligencebased Realtime Traffic ManagementDocument6 pagesArtificial Intelligencebased Realtime Traffic Managementnishmitharodrigues02No ratings yet
- A Two-Level Traffic Light Control Strategy For Preventing Incident-Based Urban Traffic CongestionDocument13 pagesA Two-Level Traffic Light Control Strategy For Preventing Incident-Based Urban Traffic Congestiondivya1587No ratings yet
- An Agent Based Model To Improve Traffic Flow and Assess The Impact of Smart Traffic LightDocument11 pagesAn Agent Based Model To Improve Traffic Flow and Assess The Impact of Smart Traffic LightIJAR JOURNALNo ratings yet
- IET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalDocument13 pagesIET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalXia YangNo ratings yet
- Research On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaDocument15 pagesResearch On Traffic Situation Analysis For Urban Road Network Through Spatiotemporal Data Mining: A Case Study of Xi'an, ChinaNiña Criselle PasiaNo ratings yet
- Chapter 4Document10 pagesChapter 4Reeya AgrawalNo ratings yet
- ManuscriptDocument20 pagesManuscriptsadaf.brsindiaNo ratings yet
- Traffic Mangement System Phase2Document11 pagesTraffic Mangement System Phase2amanbansalietNo ratings yet
- E3sconf Gcee2023 01004Document8 pagesE3sconf Gcee2023 01004REMYA Y.KNo ratings yet
- Smart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFDocument4 pagesSmart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Systematic ReviewDocument24 pagesSystematic ReviewMOHAMMAD ABU KHALIFANo ratings yet
- Sensors 22 07501Document14 pagesSensors 22 07501omar aliNo ratings yet
- Smart Intersection Design For Traffic Pedestrian ADocument7 pagesSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaNo ratings yet
- Journal of Big Data Analytics in TransportationDocument9 pagesJournal of Big Data Analytics in TransportationVaradharajan SNo ratings yet
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceDocument14 pagesApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísNo ratings yet
- Electronics 11 00465 v2Document20 pagesElectronics 11 00465 v2Tùng HàNo ratings yet
- Efficient Model To Predict The Traffic Congestion Through Deep LearningDocument8 pagesEfficient Model To Predict The Traffic Congestion Through Deep LearningIJRASETPublicationsNo ratings yet
- Traffic Signal Research PaperDocument14 pagesTraffic Signal Research PaperahadabbasadiNo ratings yet
- Composite Platoon Trajectory Planning Strategy For Intersection Throughput MaximizationDocument15 pagesComposite Platoon Trajectory Planning Strategy For Intersection Throughput Maximization张晗钰No ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 pagesInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Sustainability 15 06943Document18 pagesSustainability 15 06943maniesha1438No ratings yet
- Research Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceDocument12 pagesResearch Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceRohit BudhwaniNo ratings yet
- A Developed Modeling Approach To Improve The Traffic Congestion Prediction in Urban Vehicular NetworksDocument8 pagesA Developed Modeling Approach To Improve The Traffic Congestion Prediction in Urban Vehicular Networksrikaseo rikaNo ratings yet
- Autonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control ApproachDocument16 pagesAutonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control Approachthanhtan_tvuNo ratings yet
- Sustainability 13 08324 v2Document21 pagesSustainability 13 08324 v2ahmad almannaiNo ratings yet
- Intelligence Traffic Control SystemDocument24 pagesIntelligence Traffic Control Systemsuliat ikudaisiNo ratings yet
- IJCAI TransportationDocument5 pagesIJCAI TransportationAhmed WadeNo ratings yet
- Paper 8657Document3 pagesPaper 8657IJARSCT JournalNo ratings yet
- Smartcities 04 00026 With CoverDocument16 pagesSmartcities 04 00026 With CoverAprille Lyn SillaNo ratings yet
- 1 s2.0 S0743731522000636 MainDocument14 pages1 s2.0 S0743731522000636 MainVinniNo ratings yet
- Smart Traffic Management Using Deep LearningDocument3 pagesSmart Traffic Management Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Unified Framework For Vehicle Rerouting and Traffic Light Control To Reduce Traffic CongestionDocument17 pagesA Unified Framework For Vehicle Rerouting and Traffic Light Control To Reduce Traffic CongestionKGNo ratings yet
- Traffic Lights Management Using Optimization ToolDocument8 pagesTraffic Lights Management Using Optimization Toolalisha shahidNo ratings yet
- Paper 8871Document6 pagesPaper 8871IJARSCT JournalNo ratings yet
- 1 s2.0 S2046043017300138 MainDocument11 pages1 s2.0 S2046043017300138 MainSema AlhyasatNo ratings yet
- Short-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsDocument14 pagesShort-Term Traffic Prediction For Edge Computing-Enhanced Autonomous and Connected CarsTanay KhandelwalNo ratings yet
- A Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban TrafficDocument13 pagesA Review On The Applications of Petri Nets in Modeling Analysis and Control of Urban Trafficchongqi heNo ratings yet
- Traffic Flow Prediction and Air Quality Monitoring in Smart CitiesDocument5 pagesTraffic Flow Prediction and Air Quality Monitoring in Smart CitiesVedant ChindheNo ratings yet
- ANN Based Short-Term Traffic Flow Forecasting in Undivided Two Lane Highway Authors:, ,, &Document4 pagesANN Based Short-Term Traffic Flow Forecasting in Undivided Two Lane Highway Authors:, ,, &nav9eeeenNo ratings yet
- (23915439 - Open Engineering) Design and Evaluation of A New Intersection Model To Minimize Congestions Using VISSIM SoftwareDocument9 pages(23915439 - Open Engineering) Design and Evaluation of A New Intersection Model To Minimize Congestions Using VISSIM SoftwareFrancisco GranadosNo ratings yet
- Literature Review On Traffic FlowDocument6 pagesLiterature Review On Traffic Flowgpnovecnd100% (1)
- DiCesare1994 Chapter TheApplicationOfPetriNetsToTheDocument14 pagesDiCesare1994 Chapter TheApplicationOfPetriNetsToThechongqi heNo ratings yet
- Development of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentDocument16 pagesDevelopment of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentChristian Kyle BeltranNo ratings yet
- Adaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent SystemDocument14 pagesAdaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent Systemion cioriciNo ratings yet
- Sensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsDocument26 pagesSensors: Short-Term Traffic State Prediction Based On The Spatiotemporal Features of Critical Road SectionsTamal ChakrabortyNo ratings yet
- Road Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingDocument5 pagesRoad Traffic Prediction Using Bayesian Networks: Poo Kuan Hoong, Ian K. T. Tan, Ong Kok Chien, Choo-Yee TingsidxxxnitcNo ratings yet
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- Smart Traffic Monitoring System Project ReportDocument25 pagesSmart Traffic Monitoring System Project ReportGaming4LifeNo ratings yet
- 1 s2.0 S0378437117313523 MainDocument21 pages1 s2.0 S0378437117313523 MainParsa AstaneNo ratings yet
- 216852Document30 pages216852krishna reddyNo ratings yet
- A Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised IntersectionDocument20 pagesA Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised Intersection张晗钰No ratings yet
- RRL DocumentDocument11 pagesRRL Documentjade doctorNo ratings yet
- Synopsis Traffic SignalDocument23 pagesSynopsis Traffic SignalPooja GNo ratings yet
- Traffic Using GPSDocument18 pagesTraffic Using GPSSanjidanahid ShornaNo ratings yet
- Transportation Research Part C: Xiao Han, Guojiang Shen, Xi Yang, Xiangjie KongDocument16 pagesTransportation Research Part C: Xiao Han, Guojiang Shen, Xi Yang, Xiangjie KongEnzoNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- NamechangeDocument80 pagesNamechangeRamprasath JayabalanNo ratings yet
- Part 3 - Classical Antiquity: GreeceDocument34 pagesPart 3 - Classical Antiquity: GreeceRamprasath JayabalanNo ratings yet
- BP DODocument8 pagesBP DORamprasath JayabalanNo ratings yet
- MRTS PHASEsDocument3 pagesMRTS PHASEsRamprasath JayabalanNo ratings yet
- Part4-Medieval CitiesDocument37 pagesPart4-Medieval CitiesRamprasath Jayabalan100% (2)
- Part2-Early City CulturesDocument46 pagesPart2-Early City CulturesRamprasath JayabalanNo ratings yet
- RFP For Detailed Master Plan - Furniture Park Tuticorin - 16.08.2021Document80 pagesRFP For Detailed Master Plan - Furniture Park Tuticorin - 16.08.2021Ramprasath JayabalanNo ratings yet
- Part 1 - Pre-Urban Developments: Culture & History in Urban PlanningDocument19 pagesPart 1 - Pre-Urban Developments: Culture & History in Urban PlanningRamprasath JayabalanNo ratings yet
- Moef-CoralreefsDocument54 pagesMoef-CoralreefsRamprasath JayabalanNo ratings yet
- Signature Not Verified: Digitally Signed by R Narendra Kumar Date: 2021.11.11 13:50:20 Ist Location: Eprocure-EprocDocument1 pageSignature Not Verified: Digitally Signed by R Narendra Kumar Date: 2021.11.11 13:50:20 Ist Location: Eprocure-EprocRamprasath JayabalanNo ratings yet
- S.No Designation/Role Representing Organisation/ InstitutionDocument56 pagesS.No Designation/Role Representing Organisation/ InstitutionRamprasath JayabalanNo ratings yet
- Heritage Buildings - Draft ListDocument2 pagesHeritage Buildings - Draft ListRamprasath JayabalanNo ratings yet
- NGC 2018-19Document108 pagesNGC 2018-19Ramprasath JayabalanNo ratings yet
- Grapher Pics: y X 1 X X 1Document9 pagesGrapher Pics: y X 1 X X 1Ramprasath JayabalanNo ratings yet
- August 2021 Current Affairs by CrackIASDocument128 pagesAugust 2021 Current Affairs by CrackIASRamprasath JayabalanNo ratings yet
- Welcome To National Insurance Company LTDDocument1 pageWelcome To National Insurance Company LTDRamprasath JayabalanNo ratings yet
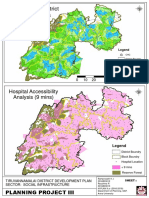
- Tiruvannamali District CHC Service Area: Hospital Accessibility Analysis (9 Mins)Document1 pageTiruvannamali District CHC Service Area: Hospital Accessibility Analysis (9 Mins)Ramprasath JayabalanNo ratings yet
- AIPMT 2014 Answer KeyDocument1 pageAIPMT 2014 Answer KeyRamprasath JayabalanNo ratings yet
- S.No Land Use AREA (SQ.M) Percentage: 19/9/2015 Time:11.30Document3 pagesS.No Land Use AREA (SQ.M) Percentage: 19/9/2015 Time:11.30Ramprasath JayabalanNo ratings yet
- A Tattoo Is For Life:-A Sociological Study of The Changing Significance of TattoosDocument50 pagesA Tattoo Is For Life:-A Sociological Study of The Changing Significance of TattoosRamprasath JayabalanNo ratings yet
- Question Bank Template MechanicalDocument3 pagesQuestion Bank Template MechanicalRamprasath JayabalanNo ratings yet
- 3D Paper StructureDocument6 pages3D Paper StructureRamprasath JayabalanNo ratings yet
- Comparative Analysis and Optimization of Active Power and Delay of 1-Bit Full Adder at 45 NM TechnologyDocument3 pagesComparative Analysis and Optimization of Active Power and Delay of 1-Bit Full Adder at 45 NM TechnologyNsrc Nano ScientifcNo ratings yet
- Discovery JT FoxxDocument10 pagesDiscovery JT Foxxrifishman1No ratings yet
- Sabre Manual PDFDocument19 pagesSabre Manual PDFJhon Jairo Mantilla VillamizarNo ratings yet
- HVDC FACTS Lab ManualDocument54 pagesHVDC FACTS Lab Manualhaseeb khan100% (3)
- Case Study On I/O Psychology: Case: Reducing Travel Cost at Applebee'sDocument2 pagesCase Study On I/O Psychology: Case: Reducing Travel Cost at Applebee'samber shahNo ratings yet
- FortiClient v5.2.0 Windows Release NotesDocument19 pagesFortiClient v5.2.0 Windows Release NotesnexrothNo ratings yet
- Counter AffidavitDocument3 pagesCounter AffidavitArmen MalawaniNo ratings yet
- NokShall MartDocument15 pagesNokShall MartMd. Fayazur RahmanNo ratings yet
- SAFe Foundations (v4.0.6)Document33 pagesSAFe Foundations (v4.0.6)PoltakJeffersonPandianganNo ratings yet
- 10 Truths About Marketing After The PandemicDocument7 pages10 Truths About Marketing After The PandemicMuhammad TahaNo ratings yet
- ExcaDrill 45A DF560L DatasheetDocument2 pagesExcaDrill 45A DF560L DatasheetИгорь ИвановNo ratings yet
- Detuned, Series Filter Reactor: For Power Factor Correction CapacitorDocument4 pagesDetuned, Series Filter Reactor: For Power Factor Correction Capacitorctxd758n100% (1)
- Sales ForecastDocument3 pagesSales ForecastzeropointwithNo ratings yet
- Steel PuttyDocument1 pageSteel PuttySiva SubramaniNo ratings yet
- Jackson - Cwa - Lodged Stipulated OrderDocument56 pagesJackson - Cwa - Lodged Stipulated Orderthe kingfishNo ratings yet
- Chapter 2 - 1 - Roots of Equations - Bracketing MethodsDocument24 pagesChapter 2 - 1 - Roots of Equations - Bracketing MethodsRoger FernandezNo ratings yet
- Manual Servico Home Theater Philips Hts2500 05Document36 pagesManual Servico Home Theater Philips Hts2500 05Karel Švihálek100% (1)
- Introduction of MISDocument36 pagesIntroduction of MISdollyNo ratings yet
- Class 2Document21 pagesClass 2md sakhwat hossainNo ratings yet
- Personalised Mobile Health and Fitness Apps: Lessons Learned From Myfitnesscompanion®Document11 pagesPersonalised Mobile Health and Fitness Apps: Lessons Learned From Myfitnesscompanion®sayed shahabuddin AdeebNo ratings yet
- General InformationDocument4 pagesGeneral InformationSonthi MooljindaNo ratings yet
- Professional English II (Job Interview) 24032021Document8 pagesProfessional English II (Job Interview) 24032021Chaterine FebbyNo ratings yet
- How Do I Manually Boot HP-UX On Integrity (Itanium) Based SystemsDocument6 pagesHow Do I Manually Boot HP-UX On Integrity (Itanium) Based Systemsnilu772008No ratings yet
- Gender and LaborDocument9 pagesGender and LaborKristine San Luis PotencianoNo ratings yet
- Cae PPT - 02-Mar-2921Document24 pagesCae PPT - 02-Mar-2921Ramesh Kavitha Sanjit 18BME0677No ratings yet
- Law On Sales Course OutlineDocument10 pagesLaw On Sales Course Outlinekikhay11No ratings yet
- Jagan: ManagementDocument12 pagesJagan: Managementabh ljknNo ratings yet