
Sándor Hajdu : Multi-Body Modelling of Single-Mast Stacker Cranes
Sándor Hajdu : Multi-Body Modelling of Single-Mast Stacker Cranes
You might also like
- Parametric Finite Element Model of AIRBUS Engine Pylon With MSC - PatranDocument9 pagesParametric Finite Element Model of AIRBUS Engine Pylon With MSC - Patranventus45No ratings yet
- Bus Body PDFDocument5 pagesBus Body PDFjohnsonNo ratings yet
- Modal and Stress Analysis of Gear Train Design inDocument16 pagesModal and Stress Analysis of Gear Train Design inDIEGO ORIGINALES MONTOYANo ratings yet
- Mathematical Modeling of Electric VehiclesDocument18 pagesMathematical Modeling of Electric VehiclesMarcel BabiiNo ratings yet
- Explicit Analysis of Heavy Vehicle Chassis Structure For The Effect of Frequency ResponseDocument5 pagesExplicit Analysis of Heavy Vehicle Chassis Structure For The Effect of Frequency ResponseHarish KuvNo ratings yet
- First PhaseDocument14 pagesFirst PhaseSurendra PalNo ratings yet
- Structural and Modal Analysis of Scooter Frame: D.Mohankumar, R. Sabarish, Dr. M. PremjeyakumarDocument10 pagesStructural and Modal Analysis of Scooter Frame: D.Mohankumar, R. Sabarish, Dr. M. PremjeyakumarChu Ngọc TúNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- Kinematic Design Method For Rail-Guided Robotic Arms: Dian J. BorgerinkDocument9 pagesKinematic Design Method For Rail-Guided Robotic Arms: Dian J. BorgerinkArmando CastilloNo ratings yet
- Construction Analysis of Mechanical Parts of Locomotives: September 2013Document9 pagesConstruction Analysis of Mechanical Parts of Locomotives: September 2013bangouraalphajulietteNo ratings yet
- The Virtual Prototype of A Mechatronic SuspensionDocument11 pagesThe Virtual Prototype of A Mechatronic SuspensionsherishaNo ratings yet
- A Study of Power Transmission PolesDocument22 pagesA Study of Power Transmission PolesVioleta LeonNo ratings yet
- Modelling and Simulation of The Drivetrain of An Omnidirectional Mobile RobotDocument13 pagesModelling and Simulation of The Drivetrain of An Omnidirectional Mobile Robot04. Nguyễn Minh Duy 12A2No ratings yet
- Parametric Optimization of Hydraulic Modular Trailer Frame Using ANSYS (APDL)Document6 pagesParametric Optimization of Hydraulic Modular Trailer Frame Using ANSYS (APDL)Fasil ParuvanathNo ratings yet
- Vibration 04 00013 PDFDocument24 pagesVibration 04 00013 PDFRat Jaga CivilNo ratings yet
- Design and Implementation of An Experimental Segway Model: March 2009Document6 pagesDesign and Implementation of An Experimental Segway Model: March 2009SKLNo ratings yet
- Machines 09 00245 v2Document34 pagesMachines 09 00245 v2Martí carboNo ratings yet
- Zhang Et Al 2023 Modeling and Simulation of The Equivalent Vertical Stiffness of Leaf Spring SuspensionsDocument14 pagesZhang Et Al 2023 Modeling and Simulation of The Equivalent Vertical Stiffness of Leaf Spring SuspensionsShanu KumarNo ratings yet
- Mode Decoupling in Vehicle Suspensions Applied To Race CarsDocument16 pagesMode Decoupling in Vehicle Suspensions Applied To Race CarsKhưu Minh PhátNo ratings yet
- Advances in Engineering Software: Asaithambi Gowri, Kanagaraj Venkatesan, Ramaswamy SivanandanDocument11 pagesAdvances in Engineering Software: Asaithambi Gowri, Kanagaraj Venkatesan, Ramaswamy SivanandanAg PradhiNo ratings yet
- Younis and Abdelati With HeaderDocument6 pagesYounis and Abdelati With HeaderScott MelgarejoNo ratings yet
- Measurement: Liang Gao, Bolun An, Tao Xin, Ji Wang, Pu WangDocument14 pagesMeasurement: Liang Gao, Bolun An, Tao Xin, Ji Wang, Pu WangshahzilezNo ratings yet
- A Performance-Driven MPC Algorithm For Underactuated Bridge CranesDocument17 pagesA Performance-Driven MPC Algorithm For Underactuated Bridge CranesGogyNo ratings yet
- Modeling Verification of An Advanced Torsional SPRDocument8 pagesModeling Verification of An Advanced Torsional SPRAnisha KoatNo ratings yet
- Engineering Science and Technology, An International JournalDocument7 pagesEngineering Science and Technology, An International Journaldiego peinadoNo ratings yet
- Evolutionary Structural Optimization As Tool in Finding Strut and Tie Models For Designing Reinforced Concrete Deep BeamDocument6 pagesEvolutionary Structural Optimization As Tool in Finding Strut and Tie Models For Designing Reinforced Concrete Deep BeamShishir Kumar NayakNo ratings yet
- An InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences SwitzerlandDocument14 pagesAn InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences Switzerlandoduimmanuel21No ratings yet
- Parameter Identification of Bouc-Wen - PublishedDocument12 pagesParameter Identification of Bouc-Wen - PublishedBirhan AbebawNo ratings yet
- Machine Tools Mechatronic AnalysisDocument10 pagesMachine Tools Mechatronic AnalysisAndrisan CatalinNo ratings yet
- Ijmet 09 04 083 PDFDocument9 pagesIjmet 09 04 083 PDF39SEAShashi KhatriNo ratings yet
- Towards An All Wheel Drive Motorcycle Dynamic ModeDocument15 pagesTowards An All Wheel Drive Motorcycle Dynamic Moderenoir0079584No ratings yet
- Vehiclestructure Dynamic Part1Document3 pagesVehiclestructure Dynamic Part1dbhawal6388No ratings yet
- Materials 14 03356Document18 pagesMaterials 14 03356dadheganesh29No ratings yet
- Paper5 - Investigations of The Application of Gyro-Mass Dampers With Various Types of Supplemental Dampers For Vibration Control of Building StructuresDocument13 pagesPaper5 - Investigations of The Application of Gyro-Mass Dampers With Various Types of Supplemental Dampers For Vibration Control of Building StructuresRodrigo LezametaNo ratings yet
- ISMA2008 Book of AbstractsDocument116 pagesISMA2008 Book of Abstracts2uuengv94No ratings yet
- Research Expertise CollattedDocument26 pagesResearch Expertise CollattedSayantan DexNo ratings yet
- Ijmet 09 04 083Document9 pagesIjmet 09 04 083Santosh RathodNo ratings yet
- Optimization 2021Document13 pagesOptimization 2021moomsanNo ratings yet
- Analysis of A Moving Load On Ballastless Rail Track: December 2015Document7 pagesAnalysis of A Moving Load On Ballastless Rail Track: December 2015amitabhNo ratings yet
- Neves Et Al 2021Document16 pagesNeves Et Al 2021Saymo Wendel de Jesus Peixoto VianaNo ratings yet
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocument25 pagesImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilNo ratings yet
- 3.DesignofCurrentController IJCSISDocument9 pages3.DesignofCurrentController IJCSISArivalakan Joyal2002No ratings yet
- Master Thesis BK 10 Dynamic Analysis of A Bridge Structure Exposed To High Speed Railway TrafficDocument80 pagesMaster Thesis BK 10 Dynamic Analysis of A Bridge Structure Exposed To High Speed Railway TrafficlarapkestuNo ratings yet
- Analysis of Flywheel: Akshay P. Punde, G.K.GattaniDocument3 pagesAnalysis of Flywheel: Akshay P. Punde, G.K.GattaniKelsey RyanNo ratings yet
- Enhancement of Bi-Objective Function Model To Master Straight - Line Facilities Sequences Using Frequency From-To ChartDocument13 pagesEnhancement of Bi-Objective Function Model To Master Straight - Line Facilities Sequences Using Frequency From-To ChartSHROUQ GAMALNo ratings yet
- Mic 2021 4 1 PDFDocument16 pagesMic 2021 4 1 PDFAnna TupitsinaNo ratings yet
- Multi-Domain Unified Modelling and Control ParametDocument19 pagesMulti-Domain Unified Modelling and Control Parametaisha khanNo ratings yet
- Monorail ThesisDocument7 pagesMonorail Thesisjillcrawfordbaltimore100% (2)
- A Study of Power Transmission Poles PDFDocument22 pagesA Study of Power Transmission Poles PDFanup waghmareNo ratings yet
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoNo ratings yet
- Liu2018 Article AnEfficientStructuralOptimizatDocument15 pagesLiu2018 Article AnEfficientStructuralOptimizatSairam PeddiNo ratings yet
- Design of Multivariable Controller PI For PropulsiDocument13 pagesDesign of Multivariable Controller PI For PropulsiAndika WicaksanaNo ratings yet
- Engineering Structures: Xinzheng Lu, Linlin Xie, Cheng Yu, Xiao LuDocument11 pagesEngineering Structures: Xinzheng Lu, Linlin Xie, Cheng Yu, Xiao Luم.احمدخليلNo ratings yet
- Analyze About The Wind TurbineDocument18 pagesAnalyze About The Wind Turbinedoanminhduy100% (1)
- 1 s2.0 S0957415809001585 MainDocument17 pages1 s2.0 S0957415809001585 MainLeila JoudiNo ratings yet
- Ijhvs 2021 114413Document14 pagesIjhvs 2021 114413Rodrigo BaldovinoNo ratings yet
- PHD BookletDocument26 pagesPHD Booklethk germanNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Plasma Spray Process Operating Parameters Optimization Basedon Artificial IntelligenceDocument18 pagesPlasma Spray Process Operating Parameters Optimization Basedon Artificial Intelligencesuresh_501No ratings yet
- Sensors: Evaluation of The Uniformity of Protective Coatings On Concrete Structure Surfaces Based On Cluster AnalysisDocument19 pagesSensors: Evaluation of The Uniformity of Protective Coatings On Concrete Structure Surfaces Based On Cluster Analysissuresh_501No ratings yet
- Structural Engineering: Indian Society OF Structural EngineersDocument24 pagesStructural Engineering: Indian Society OF Structural Engineerssuresh_501No ratings yet
- Metals: High Velocity Oxygen Liquid-Fuel (HVOLF) Spraying of WC-Based Coatings For Transport Industrial ApplicationsDocument21 pagesMetals: High Velocity Oxygen Liquid-Fuel (HVOLF) Spraying of WC-Based Coatings For Transport Industrial Applicationssuresh_501No ratings yet
- Sensitivity Analysis and Optimisation of HVOF Process Inputs To Reduce Porosity and Maximise Hardness of WC-10Co-4Cr CoatingsDocument23 pagesSensitivity Analysis and Optimisation of HVOF Process Inputs To Reduce Porosity and Maximise Hardness of WC-10Co-4Cr Coatingssuresh_501No ratings yet
- Macroparticle Detection in Surface Coating Using Image ProcessingDocument6 pagesMacroparticle Detection in Surface Coating Using Image Processingsuresh_501No ratings yet
- Research ArticleDocument12 pagesResearch Articlesuresh_501No ratings yet
- Research ArticleDocument20 pagesResearch Articlesuresh_501No ratings yet
- Research Article: Porosity Analysis of Plasma Sprayed Coating by Application of Soft ComputingDocument7 pagesResearch Article: Porosity Analysis of Plasma Sprayed Coating by Application of Soft Computingsuresh_501No ratings yet
- University of Mumbai: "Installation of Safety Brakes in Eot Cranes"Document56 pagesUniversity of Mumbai: "Installation of Safety Brakes in Eot Cranes"suresh_501No ratings yet
- Prediction and Analysis of High Velocity Oxy Fuel (HVOF) Sprayed Coating Using Artificial Neural NetworkDocument31 pagesPrediction and Analysis of High Velocity Oxy Fuel (HVOF) Sprayed Coating Using Artificial Neural Networksuresh_501No ratings yet
- Advanced Simulation of Tower Crane Operation Utilizing System Dynamics Modeling and Lean PrinciplesDocument10 pagesAdvanced Simulation of Tower Crane Operation Utilizing System Dynamics Modeling and Lean Principlessuresh_501No ratings yet
- Beam With Joint and Offset LoadDocument9 pagesBeam With Joint and Offset Loadsuresh_501No ratings yet
- Finite Element Analysis of Rack-Pinion System of A Jack-Up RigDocument6 pagesFinite Element Analysis of Rack-Pinion System of A Jack-Up Rigsuresh_501No ratings yet
- Hernandez Eileen C 201212 MastDocument99 pagesHernandez Eileen C 201212 Mastsuresh_501No ratings yet
- Irjet V7i1219Document6 pagesIrjet V7i1219suresh_501No ratings yet
- A Model To Optimize Single Tower Crane Location Within A Construction Site (PDFDrive)Document468 pagesA Model To Optimize Single Tower Crane Location Within A Construction Site (PDFDrive)suresh_501No ratings yet
- Modeling and Simulation of Static and Dynamic Analysis of Spur GearDocument8 pagesModeling and Simulation of Static and Dynamic Analysis of Spur Gearsuresh_501No ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060suresh_501No ratings yet
- Comparison of The Seismic and Wind Analyses of Two Tower CranesDocument20 pagesComparison of The Seismic and Wind Analyses of Two Tower Cranessuresh_501No ratings yet
- Emd MCQDocument47 pagesEmd MCQYashraj patilNo ratings yet
- Unit 3: Chapter 5: Lintels and ArchesDocument10 pagesUnit 3: Chapter 5: Lintels and ArchesSana AimanNo ratings yet
- Biofluid Mechanics Chapter 6Document21 pagesBiofluid Mechanics Chapter 6AbcdNo ratings yet
- Assingment 2 MEC610Document14 pagesAssingment 2 MEC610MUHAMMAD NURUDIN IMAN GHANINo ratings yet
- HJT MBB Half-Cut Bifacial Dual-Glass Module Ska611HdgdcDocument2 pagesHJT MBB Half-Cut Bifacial Dual-Glass Module Ska611HdgdcMarko Maky ZivkovicNo ratings yet
- Appendix 4 - SSR - SG6.2-170-135mHH (1) Cel Mai ImportantDocument56 pagesAppendix 4 - SSR - SG6.2-170-135mHH (1) Cel Mai ImportantDaniel StefanNo ratings yet
- 1 s2.0 S2214785318313646 MainDocument7 pages1 s2.0 S2214785318313646 MainmaximNo ratings yet
- 6.2. PV ModulesDocument42 pages6.2. PV ModulesSolar Training CentreNo ratings yet
- Assignment No. 1 - Simple StressDocument5 pagesAssignment No. 1 - Simple StressSakura BlossomsNo ratings yet
- Symbols Lect. No. Tim E: K E E HDocument15 pagesSymbols Lect. No. Tim E: K E E HYuni_Arifwati_5495No ratings yet
- 2.3 Design of Compression MembersDocument26 pages2.3 Design of Compression MembersNazihahNo ratings yet
- Behavior and Design of Single Adhesive Anchors Under Tensile Load in Uncracked ConcreteDocument18 pagesBehavior and Design of Single Adhesive Anchors Under Tensile Load in Uncracked ConcreteTugce CeranNo ratings yet
- 5 Temp Ideal Gas-Fall 2022Document22 pages5 Temp Ideal Gas-Fall 2022asakr8481No ratings yet
- Deeply Dimpled TubeDocument13 pagesDeeply Dimpled Tubemh.cheraghi.1989No ratings yet
- SCL K05-MS-MOR - Pressure-0Document1 pageSCL K05-MS-MOR - Pressure-0kushalkaushalNo ratings yet
- Dos & Donts in WeldingDocument19 pagesDos & Donts in Weldingkumaraswamy.kNo ratings yet
- Banghay Aralin Sa Filipino, Esp, at Ap 7esDocument4 pagesBanghay Aralin Sa Filipino, Esp, at Ap 7esPETER SALIVIONo ratings yet
- Lab Report Template Physics 11422Document4 pagesLab Report Template Physics 11422GonzaloNo ratings yet
- MATH207CDocument3 pagesMATH207CVikas KimothiNo ratings yet
- Model Acwc-Sc Screw Type Air Cooled Packaged Chillers: Service Manual 6500ADocument19 pagesModel Acwc-Sc Screw Type Air Cooled Packaged Chillers: Service Manual 6500ACristobal CamposNo ratings yet
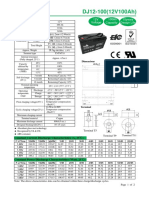
- DJ12 100Document2 pagesDJ12 100ParvezNo ratings yet
- PHD Thesis On Fractal AntennasDocument7 pagesPHD Thesis On Fractal AntennasKim Daniels100% (2)
- Little Angels High School, Gwalior Class - XI Subject - Physics Month - July Teacher: Hariom PnadeyDocument12 pagesLittle Angels High School, Gwalior Class - XI Subject - Physics Month - July Teacher: Hariom Pnadeythe titleNo ratings yet
- Api List 2000Document50 pagesApi List 2000Igor TsurkanNo ratings yet
- I.R Test of TransformerDocument1 pageI.R Test of TransformerVedant .Chavan50% (2)
- Effect of Magnetic Fields On Growth and AntioxidanDocument8 pagesEffect of Magnetic Fields On Growth and AntioxidanKoko GamesNo ratings yet
- 3214 Ensayos+Transformador PDFDocument474 pages3214 Ensayos+Transformador PDFCarlos Fuentes CamposNo ratings yet
- Ma Zeosad 01 010004 en 220818Document2 pagesMa Zeosad 01 010004 en 220818Ricardo OliveiraNo ratings yet
- Supercontinuum Light 2013 PreprintDocument11 pagesSupercontinuum Light 2013 Preprintsuleiman hewadiNo ratings yet
- Stellite 1 DS01-22008 (S R0808)Document2 pagesStellite 1 DS01-22008 (S R0808)Kunal PandeyNo ratings yet












































































































Download as pdf or txt
You might also like
- Parametric Finite Element Model of AIRBUS Engine Pylon With MSC - PatranDocument9 pagesParametric Finite Element Model of AIRBUS Engine Pylon With MSC - Patranventus45No ratings yet
- Bus Body PDFDocument5 pagesBus Body PDFjohnsonNo ratings yet
- Modal and Stress Analysis of Gear Train Design inDocument16 pagesModal and Stress Analysis of Gear Train Design inDIEGO ORIGINALES MONTOYANo ratings yet
- Mathematical Modeling of Electric VehiclesDocument18 pagesMathematical Modeling of Electric VehiclesMarcel BabiiNo ratings yet
- Explicit Analysis of Heavy Vehicle Chassis Structure For The Effect of Frequency ResponseDocument5 pagesExplicit Analysis of Heavy Vehicle Chassis Structure For The Effect of Frequency ResponseHarish KuvNo ratings yet
- First PhaseDocument14 pagesFirst PhaseSurendra PalNo ratings yet
- Structural and Modal Analysis of Scooter Frame: D.Mohankumar, R. Sabarish, Dr. M. PremjeyakumarDocument10 pagesStructural and Modal Analysis of Scooter Frame: D.Mohankumar, R. Sabarish, Dr. M. PremjeyakumarChu Ngọc TúNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- Kinematic Design Method For Rail-Guided Robotic Arms: Dian J. BorgerinkDocument9 pagesKinematic Design Method For Rail-Guided Robotic Arms: Dian J. BorgerinkArmando CastilloNo ratings yet
- Construction Analysis of Mechanical Parts of Locomotives: September 2013Document9 pagesConstruction Analysis of Mechanical Parts of Locomotives: September 2013bangouraalphajulietteNo ratings yet
- The Virtual Prototype of A Mechatronic SuspensionDocument11 pagesThe Virtual Prototype of A Mechatronic SuspensionsherishaNo ratings yet
- A Study of Power Transmission PolesDocument22 pagesA Study of Power Transmission PolesVioleta LeonNo ratings yet
- Modelling and Simulation of The Drivetrain of An Omnidirectional Mobile RobotDocument13 pagesModelling and Simulation of The Drivetrain of An Omnidirectional Mobile Robot04. Nguyễn Minh Duy 12A2No ratings yet
- Parametric Optimization of Hydraulic Modular Trailer Frame Using ANSYS (APDL)Document6 pagesParametric Optimization of Hydraulic Modular Trailer Frame Using ANSYS (APDL)Fasil ParuvanathNo ratings yet
- Vibration 04 00013 PDFDocument24 pagesVibration 04 00013 PDFRat Jaga CivilNo ratings yet
- Design and Implementation of An Experimental Segway Model: March 2009Document6 pagesDesign and Implementation of An Experimental Segway Model: March 2009SKLNo ratings yet
- Machines 09 00245 v2Document34 pagesMachines 09 00245 v2Martí carboNo ratings yet
- Zhang Et Al 2023 Modeling and Simulation of The Equivalent Vertical Stiffness of Leaf Spring SuspensionsDocument14 pagesZhang Et Al 2023 Modeling and Simulation of The Equivalent Vertical Stiffness of Leaf Spring SuspensionsShanu KumarNo ratings yet
- Mode Decoupling in Vehicle Suspensions Applied To Race CarsDocument16 pagesMode Decoupling in Vehicle Suspensions Applied To Race CarsKhưu Minh PhátNo ratings yet
- Advances in Engineering Software: Asaithambi Gowri, Kanagaraj Venkatesan, Ramaswamy SivanandanDocument11 pagesAdvances in Engineering Software: Asaithambi Gowri, Kanagaraj Venkatesan, Ramaswamy SivanandanAg PradhiNo ratings yet
- Younis and Abdelati With HeaderDocument6 pagesYounis and Abdelati With HeaderScott MelgarejoNo ratings yet
- Measurement: Liang Gao, Bolun An, Tao Xin, Ji Wang, Pu WangDocument14 pagesMeasurement: Liang Gao, Bolun An, Tao Xin, Ji Wang, Pu WangshahzilezNo ratings yet
- A Performance-Driven MPC Algorithm For Underactuated Bridge CranesDocument17 pagesA Performance-Driven MPC Algorithm For Underactuated Bridge CranesGogyNo ratings yet
- Modeling Verification of An Advanced Torsional SPRDocument8 pagesModeling Verification of An Advanced Torsional SPRAnisha KoatNo ratings yet
- Engineering Science and Technology, An International JournalDocument7 pagesEngineering Science and Technology, An International Journaldiego peinadoNo ratings yet
- Evolutionary Structural Optimization As Tool in Finding Strut and Tie Models For Designing Reinforced Concrete Deep BeamDocument6 pagesEvolutionary Structural Optimization As Tool in Finding Strut and Tie Models For Designing Reinforced Concrete Deep BeamShishir Kumar NayakNo ratings yet
- An InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences SwitzerlandDocument14 pagesAn InPipe Inspection Robot With Permanent Magnets and Omnidirectional Wheels Design and ImplementationApplied Sciences Switzerlandoduimmanuel21No ratings yet
- Parameter Identification of Bouc-Wen - PublishedDocument12 pagesParameter Identification of Bouc-Wen - PublishedBirhan AbebawNo ratings yet
- Machine Tools Mechatronic AnalysisDocument10 pagesMachine Tools Mechatronic AnalysisAndrisan CatalinNo ratings yet
- Ijmet 09 04 083 PDFDocument9 pagesIjmet 09 04 083 PDF39SEAShashi KhatriNo ratings yet
- Towards An All Wheel Drive Motorcycle Dynamic ModeDocument15 pagesTowards An All Wheel Drive Motorcycle Dynamic Moderenoir0079584No ratings yet
- Vehiclestructure Dynamic Part1Document3 pagesVehiclestructure Dynamic Part1dbhawal6388No ratings yet
- Materials 14 03356Document18 pagesMaterials 14 03356dadheganesh29No ratings yet
- Paper5 - Investigations of The Application of Gyro-Mass Dampers With Various Types of Supplemental Dampers For Vibration Control of Building StructuresDocument13 pagesPaper5 - Investigations of The Application of Gyro-Mass Dampers With Various Types of Supplemental Dampers For Vibration Control of Building StructuresRodrigo LezametaNo ratings yet
- ISMA2008 Book of AbstractsDocument116 pagesISMA2008 Book of Abstracts2uuengv94No ratings yet
- Research Expertise CollattedDocument26 pagesResearch Expertise CollattedSayantan DexNo ratings yet
- Ijmet 09 04 083Document9 pagesIjmet 09 04 083Santosh RathodNo ratings yet
- Optimization 2021Document13 pagesOptimization 2021moomsanNo ratings yet
- Analysis of A Moving Load On Ballastless Rail Track: December 2015Document7 pagesAnalysis of A Moving Load On Ballastless Rail Track: December 2015amitabhNo ratings yet
- Neves Et Al 2021Document16 pagesNeves Et Al 2021Saymo Wendel de Jesus Peixoto VianaNo ratings yet
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocument25 pagesImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilNo ratings yet
- 3.DesignofCurrentController IJCSISDocument9 pages3.DesignofCurrentController IJCSISArivalakan Joyal2002No ratings yet
- Master Thesis BK 10 Dynamic Analysis of A Bridge Structure Exposed To High Speed Railway TrafficDocument80 pagesMaster Thesis BK 10 Dynamic Analysis of A Bridge Structure Exposed To High Speed Railway TrafficlarapkestuNo ratings yet
- Analysis of Flywheel: Akshay P. Punde, G.K.GattaniDocument3 pagesAnalysis of Flywheel: Akshay P. Punde, G.K.GattaniKelsey RyanNo ratings yet
- Enhancement of Bi-Objective Function Model To Master Straight - Line Facilities Sequences Using Frequency From-To ChartDocument13 pagesEnhancement of Bi-Objective Function Model To Master Straight - Line Facilities Sequences Using Frequency From-To ChartSHROUQ GAMALNo ratings yet
- Mic 2021 4 1 PDFDocument16 pagesMic 2021 4 1 PDFAnna TupitsinaNo ratings yet
- Multi-Domain Unified Modelling and Control ParametDocument19 pagesMulti-Domain Unified Modelling and Control Parametaisha khanNo ratings yet
- Monorail ThesisDocument7 pagesMonorail Thesisjillcrawfordbaltimore100% (2)
- A Study of Power Transmission Poles PDFDocument22 pagesA Study of Power Transmission Poles PDFanup waghmareNo ratings yet
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoNo ratings yet
- Liu2018 Article AnEfficientStructuralOptimizatDocument15 pagesLiu2018 Article AnEfficientStructuralOptimizatSairam PeddiNo ratings yet
- Design of Multivariable Controller PI For PropulsiDocument13 pagesDesign of Multivariable Controller PI For PropulsiAndika WicaksanaNo ratings yet
- Engineering Structures: Xinzheng Lu, Linlin Xie, Cheng Yu, Xiao LuDocument11 pagesEngineering Structures: Xinzheng Lu, Linlin Xie, Cheng Yu, Xiao Luم.احمدخليلNo ratings yet
- Analyze About The Wind TurbineDocument18 pagesAnalyze About The Wind Turbinedoanminhduy100% (1)
- 1 s2.0 S0957415809001585 MainDocument17 pages1 s2.0 S0957415809001585 MainLeila JoudiNo ratings yet
- Ijhvs 2021 114413Document14 pagesIjhvs 2021 114413Rodrigo BaldovinoNo ratings yet
- PHD BookletDocument26 pagesPHD Booklethk germanNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Plasma Spray Process Operating Parameters Optimization Basedon Artificial IntelligenceDocument18 pagesPlasma Spray Process Operating Parameters Optimization Basedon Artificial Intelligencesuresh_501No ratings yet
- Sensors: Evaluation of The Uniformity of Protective Coatings On Concrete Structure Surfaces Based On Cluster AnalysisDocument19 pagesSensors: Evaluation of The Uniformity of Protective Coatings On Concrete Structure Surfaces Based On Cluster Analysissuresh_501No ratings yet
- Structural Engineering: Indian Society OF Structural EngineersDocument24 pagesStructural Engineering: Indian Society OF Structural Engineerssuresh_501No ratings yet
- Metals: High Velocity Oxygen Liquid-Fuel (HVOLF) Spraying of WC-Based Coatings For Transport Industrial ApplicationsDocument21 pagesMetals: High Velocity Oxygen Liquid-Fuel (HVOLF) Spraying of WC-Based Coatings For Transport Industrial Applicationssuresh_501No ratings yet
- Sensitivity Analysis and Optimisation of HVOF Process Inputs To Reduce Porosity and Maximise Hardness of WC-10Co-4Cr CoatingsDocument23 pagesSensitivity Analysis and Optimisation of HVOF Process Inputs To Reduce Porosity and Maximise Hardness of WC-10Co-4Cr Coatingssuresh_501No ratings yet
- Macroparticle Detection in Surface Coating Using Image ProcessingDocument6 pagesMacroparticle Detection in Surface Coating Using Image Processingsuresh_501No ratings yet
- Research ArticleDocument12 pagesResearch Articlesuresh_501No ratings yet
- Research ArticleDocument20 pagesResearch Articlesuresh_501No ratings yet
- Research Article: Porosity Analysis of Plasma Sprayed Coating by Application of Soft ComputingDocument7 pagesResearch Article: Porosity Analysis of Plasma Sprayed Coating by Application of Soft Computingsuresh_501No ratings yet
- University of Mumbai: "Installation of Safety Brakes in Eot Cranes"Document56 pagesUniversity of Mumbai: "Installation of Safety Brakes in Eot Cranes"suresh_501No ratings yet
- Prediction and Analysis of High Velocity Oxy Fuel (HVOF) Sprayed Coating Using Artificial Neural NetworkDocument31 pagesPrediction and Analysis of High Velocity Oxy Fuel (HVOF) Sprayed Coating Using Artificial Neural Networksuresh_501No ratings yet
- Advanced Simulation of Tower Crane Operation Utilizing System Dynamics Modeling and Lean PrinciplesDocument10 pagesAdvanced Simulation of Tower Crane Operation Utilizing System Dynamics Modeling and Lean Principlessuresh_501No ratings yet
- Beam With Joint and Offset LoadDocument9 pagesBeam With Joint and Offset Loadsuresh_501No ratings yet
- Finite Element Analysis of Rack-Pinion System of A Jack-Up RigDocument6 pagesFinite Element Analysis of Rack-Pinion System of A Jack-Up Rigsuresh_501No ratings yet
- Hernandez Eileen C 201212 MastDocument99 pagesHernandez Eileen C 201212 Mastsuresh_501No ratings yet
- Irjet V7i1219Document6 pagesIrjet V7i1219suresh_501No ratings yet
- A Model To Optimize Single Tower Crane Location Within A Construction Site (PDFDrive)Document468 pagesA Model To Optimize Single Tower Crane Location Within A Construction Site (PDFDrive)suresh_501No ratings yet
- Modeling and Simulation of Static and Dynamic Analysis of Spur GearDocument8 pagesModeling and Simulation of Static and Dynamic Analysis of Spur Gearsuresh_501No ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060suresh_501No ratings yet
- Comparison of The Seismic and Wind Analyses of Two Tower CranesDocument20 pagesComparison of The Seismic and Wind Analyses of Two Tower Cranessuresh_501No ratings yet
- Emd MCQDocument47 pagesEmd MCQYashraj patilNo ratings yet
- Unit 3: Chapter 5: Lintels and ArchesDocument10 pagesUnit 3: Chapter 5: Lintels and ArchesSana AimanNo ratings yet
- Biofluid Mechanics Chapter 6Document21 pagesBiofluid Mechanics Chapter 6AbcdNo ratings yet
- Assingment 2 MEC610Document14 pagesAssingment 2 MEC610MUHAMMAD NURUDIN IMAN GHANINo ratings yet
- HJT MBB Half-Cut Bifacial Dual-Glass Module Ska611HdgdcDocument2 pagesHJT MBB Half-Cut Bifacial Dual-Glass Module Ska611HdgdcMarko Maky ZivkovicNo ratings yet
- Appendix 4 - SSR - SG6.2-170-135mHH (1) Cel Mai ImportantDocument56 pagesAppendix 4 - SSR - SG6.2-170-135mHH (1) Cel Mai ImportantDaniel StefanNo ratings yet
- 1 s2.0 S2214785318313646 MainDocument7 pages1 s2.0 S2214785318313646 MainmaximNo ratings yet
- 6.2. PV ModulesDocument42 pages6.2. PV ModulesSolar Training CentreNo ratings yet
- Assignment No. 1 - Simple StressDocument5 pagesAssignment No. 1 - Simple StressSakura BlossomsNo ratings yet
- Symbols Lect. No. Tim E: K E E HDocument15 pagesSymbols Lect. No. Tim E: K E E HYuni_Arifwati_5495No ratings yet
- 2.3 Design of Compression MembersDocument26 pages2.3 Design of Compression MembersNazihahNo ratings yet
- Behavior and Design of Single Adhesive Anchors Under Tensile Load in Uncracked ConcreteDocument18 pagesBehavior and Design of Single Adhesive Anchors Under Tensile Load in Uncracked ConcreteTugce CeranNo ratings yet
- 5 Temp Ideal Gas-Fall 2022Document22 pages5 Temp Ideal Gas-Fall 2022asakr8481No ratings yet
- Deeply Dimpled TubeDocument13 pagesDeeply Dimpled Tubemh.cheraghi.1989No ratings yet
- SCL K05-MS-MOR - Pressure-0Document1 pageSCL K05-MS-MOR - Pressure-0kushalkaushalNo ratings yet
- Dos & Donts in WeldingDocument19 pagesDos & Donts in Weldingkumaraswamy.kNo ratings yet
- Banghay Aralin Sa Filipino, Esp, at Ap 7esDocument4 pagesBanghay Aralin Sa Filipino, Esp, at Ap 7esPETER SALIVIONo ratings yet
- Lab Report Template Physics 11422Document4 pagesLab Report Template Physics 11422GonzaloNo ratings yet
- MATH207CDocument3 pagesMATH207CVikas KimothiNo ratings yet
- Model Acwc-Sc Screw Type Air Cooled Packaged Chillers: Service Manual 6500ADocument19 pagesModel Acwc-Sc Screw Type Air Cooled Packaged Chillers: Service Manual 6500ACristobal CamposNo ratings yet
- DJ12 100Document2 pagesDJ12 100ParvezNo ratings yet
- PHD Thesis On Fractal AntennasDocument7 pagesPHD Thesis On Fractal AntennasKim Daniels100% (2)
- Little Angels High School, Gwalior Class - XI Subject - Physics Month - July Teacher: Hariom PnadeyDocument12 pagesLittle Angels High School, Gwalior Class - XI Subject - Physics Month - July Teacher: Hariom Pnadeythe titleNo ratings yet
- Api List 2000Document50 pagesApi List 2000Igor TsurkanNo ratings yet
- I.R Test of TransformerDocument1 pageI.R Test of TransformerVedant .Chavan50% (2)
- Effect of Magnetic Fields On Growth and AntioxidanDocument8 pagesEffect of Magnetic Fields On Growth and AntioxidanKoko GamesNo ratings yet
- 3214 Ensayos+Transformador PDFDocument474 pages3214 Ensayos+Transformador PDFCarlos Fuentes CamposNo ratings yet
- Ma Zeosad 01 010004 en 220818Document2 pagesMa Zeosad 01 010004 en 220818Ricardo OliveiraNo ratings yet
- Supercontinuum Light 2013 PreprintDocument11 pagesSupercontinuum Light 2013 Preprintsuleiman hewadiNo ratings yet
- Stellite 1 DS01-22008 (S R0808)Document2 pagesStellite 1 DS01-22008 (S R0808)Kunal PandeyNo ratings yet