Download as pdf or txt
You might also like
- Chris Marker, Memories of The Future PDFDocument258 pagesChris Marker, Memories of The Future PDFJuan Esteban Avalo Valencia100% (3)
- C1 Advanced Trainer: Six Practice Tests With AnswersDocument4 pagesC1 Advanced Trainer: Six Practice Tests With AnswersScute2336% (11)
- Calculation For Black Start Diesel Generators - X0Document10 pagesCalculation For Black Start Diesel Generators - X0waqqar shaikh100% (1)
- Hydraulic Pump - Test and AdjustDocument22 pagesHydraulic Pump - Test and AdjustYustincita Quiquita Hermosa86% (22)
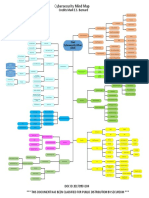
- Cybersecurity Mind Map V01R04 DOC ID 2017095Document1 pageCybersecurity Mind Map V01R04 DOC ID 2017095James HowlettNo ratings yet
- Real Listening and Speaking 2Document9 pagesReal Listening and Speaking 2Irina Chircev60% (5)
- Portoviejo En2019 Uccn Call Application FormDocument19 pagesPortoviejo En2019 Uccn Call Application FormFabian Bedon Samaniego100% (2)
- EP15811966NWB1Document16 pagesEP15811966NWB1hvarunkamathNo ratings yet
- EP06025874NWA1Document19 pagesEP06025874NWA1raaspoy2007No ratings yet
- Starter GeneratorDocument15 pagesStarter GeneratorchodekiranNo ratings yet
- EP4273384A1Document16 pagesEP4273384A1منذر كمالNo ratings yet
- EP11156486NWB1Document10 pagesEP11156486NWB1Ali AliNo ratings yet
- PSCAD-Based Modeling and Flicker Estimation For Wind TurbinesDocument7 pagesPSCAD-Based Modeling and Flicker Estimation For Wind TurbinestunghtdNo ratings yet
- Ep03257006nwb1 PDFDocument9 pagesEp03257006nwb1 PDFalexmontellNo ratings yet
- Cryogenic Centrifugal Pump.Document28 pagesCryogenic Centrifugal Pump.SIDDARAJU NNo ratings yet
- EP21160517NWB1Document16 pagesEP21160517NWB1frank saruhanNo ratings yet
- EP19209582NWA1Document13 pagesEP19209582NWA1VAIBHAV36No ratings yet
- Automatic Wind Generator Arrangement For The Production of Continuous Electrical PowerDocument5 pagesAutomatic Wind Generator Arrangement For The Production of Continuous Electrical PowerbillthegunmNo ratings yet
- United States Patent: ShkondinDocument16 pagesUnited States Patent: ShkondinAngel DiosdadoNo ratings yet
- Correction of WindspeedDocument16 pagesCorrection of WindspeedBinh NgoNo ratings yet
- Hydro TurbinesDocument17 pagesHydro TurbinesSavesh Tripathi100% (1)
- Station Transformer Sizing Report For ArarDocument10 pagesStation Transformer Sizing Report For Ararsrigirisetty208No ratings yet
- High Leak-Off of The Electronic Unit Injector On C6.6 and C4.4 EnginesDocument22 pagesHigh Leak-Off of The Electronic Unit Injector On C6.6 and C4.4 Enginesahmed mohamedNo ratings yet
- European Patent Application: Over-Unity Energy Motor - GeneratorDocument18 pagesEuropean Patent Application: Over-Unity Energy Motor - GeneratoravalosheNo ratings yet
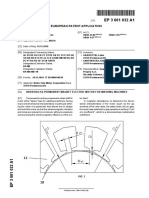
- European Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftDocument23 pagesEuropean Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftgorgiNo ratings yet
- GTG 2081VS Cat3516Document7 pagesGTG 2081VS Cat3516walternbaNo ratings yet
- Gas Generator Set of MTU Engine Tech JBG1000Document7 pagesGas Generator Set of MTU Engine Tech JBG1000Pankaj KambleNo ratings yet
- Motor e Conversor de Torque - InstalarDocument18 pagesMotor e Conversor de Torque - InstalarMaylson SenaNo ratings yet
- Tepzz 8Z - 6 B - T: European Patent SpecificationDocument29 pagesTepzz 8Z - 6 B - T: European Patent SpecificationHartono ExcaNo ratings yet
- Jgs616 Ds Preliminary DataDocument4 pagesJgs616 Ds Preliminary DataEdutamNo ratings yet
- Generate PDFDocument11 pagesGenerate PDFGustavo RamirezNo ratings yet
- 13.8kV Bus Duct Sizing For Arar Dated 23.03.2005Document9 pages13.8kV Bus Duct Sizing For Arar Dated 23.03.2005srigirisetty208No ratings yet
- Device For Attaching An Electric Battery To The Chassis of A Motor VehicleDocument14 pagesDevice For Attaching An Electric Battery To The Chassis of A Motor VehicleTUNCAY GUMUSNo ratings yet
- Teste de Bomba de Engrenagem (Piloto) 320C & 320C LDocument6 pagesTeste de Bomba de Engrenagem (Piloto) 320C & 320C Lmepita.catanduvasNo ratings yet
- TEPZZ 8 - 59B - T: European Patent SpecificationDocument18 pagesTEPZZ 8 - 59B - T: European Patent SpecificationAna LisaNo ratings yet
- J P Mukherji & Associates PVT LTD ParametersDocument8 pagesJ P Mukherji & Associates PVT LTD ParametersAnonymous 7ZYHilDNo ratings yet
- European Patent Specification: Operation Information Management Evaluation SystemDocument20 pagesEuropean Patent Specification: Operation Information Management Evaluation SystemVishal ThakurNo ratings yet
- TEPZZ - 98 - Z9B - T: European Patent SpecificationDocument30 pagesTEPZZ - 98 - Z9B - T: European Patent SpecificationMrSebolliniNo ratings yet
- TEPZZ 96 4B - T: European Patent SpecificationDocument32 pagesTEPZZ 96 4B - T: European Patent SpecificationPresident PCNo ratings yet
- Harmonic AnalysisDocument17 pagesHarmonic Analysiscuongpham30160% (5)
- Start Up G3500 PDFDocument33 pagesStart Up G3500 PDFPancho ALNo ratings yet
- 72-40-01 - Combustion Chamber, LPT Stator SupportDocument16 pages72-40-01 - Combustion Chamber, LPT Stator SupportFabricio ValenteNo ratings yet
- Identification of External Terminals On Alternators (1405,1406,1400)Document15 pagesIdentification of External Terminals On Alternators (1405,1406,1400)Odai AlsaafinNo ratings yet
- EP1616741A1 Electric MotorDocument8 pagesEP1616741A1 Electric MotorAngel CoteraNo ratings yet
- EP1445131A3Document4 pagesEP1445131A3Viraaj singhNo ratings yet
- Stress Calculations For Sucker Rod Pumping SystemsDocument32 pagesStress Calculations For Sucker Rod Pumping Systemsboy.r.indrawanNo ratings yet
- Algebra Bald OrcDocument7 pagesAlgebra Bald OrcGilberto Morales CaldasNo ratings yet
- EP0361836A2Document12 pagesEP0361836A2pavizzNo ratings yet
- Engine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and ControlDocument6 pagesEngine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and Controlstefanovicana1No ratings yet
- Automatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at PipavavDocument104 pagesAutomatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at Pipavavanbesivam87_49857255100% (1)
- Speed Control OF WIND TURBINEDocument4 pagesSpeed Control OF WIND TURBINESHADDOWWNo ratings yet
- EP1130765B1Document10 pagesEP1130765B1LOUAYTRONNo ratings yet
- TEPZZ 87 - 9B - T: European Patent SpecificationDocument17 pagesTEPZZ 87 - 9B - T: European Patent SpecificationDirga Delonix RegiaNo ratings yet
- EP2596680B1Document28 pagesEP2596680B1ErockNo ratings yet
- CSI Vs VSIDocument8 pagesCSI Vs VSIManikandan DurairajNo ratings yet
- Dynamic Modeling of Variable Speed Centrifugal Pump Utilizing MATLAB / SIMULINKDocument7 pagesDynamic Modeling of Variable Speed Centrifugal Pump Utilizing MATLAB / SIMULINKInternational Journal of Science and Engineering InvestigationsNo ratings yet
- Torque ControlDocument6 pagesTorque Controlochenapothik2012No ratings yet
- Ignition Timing - AdjustDocument1 pageIgnition Timing - Adjustwagner_guimarães_10% (1)
- EP1983168B1Document20 pagesEP1983168B1anggiadeliasofyaNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2010/0288571 A1Document29 pagesPatent Application Publication (10) Pub. No.: US 2010/0288571 A1KrozeNo ratings yet
- TEPZZ 69 456B - T: European Patent SpecificationDocument26 pagesTEPZZ 69 456B - T: European Patent SpecificationAndi KaNo ratings yet
- Hydraulic Modeling of Torque ConvertersDocument8 pagesHydraulic Modeling of Torque Convertersserf007100% (1)
- TEPZZ 4 - 455A - T: European Patent ApplicationDocument20 pagesTEPZZ 4 - 455A - T: European Patent ApplicationStephane Brehaut PhD Ceng SMIEEENo ratings yet
- Posebni Otisak /: Separat OffprintDocument22 pagesPosebni Otisak /: Separat OffprintFilip MeđimorecNo ratings yet
- 21st-Century-Literature Q1 Module5 RepTextsVisayasDocument29 pages21st-Century-Literature Q1 Module5 RepTextsVisayasWilfredo de la Cerna Jr.67% (3)
- Activity Ideas For Middle School StudentsDocument3 pagesActivity Ideas For Middle School Studentspace_saNo ratings yet
- ECBA V3 Study Guide Sample ChapterDocument50 pagesECBA V3 Study Guide Sample Chapterbasantkumar83No ratings yet
- UT Dallas Syllabus For Psy3331.001.10s Taught by Karen Huxtable-Jester (kxh014900)Document14 pagesUT Dallas Syllabus For Psy3331.001.10s Taught by Karen Huxtable-Jester (kxh014900)UT Dallas Provost's Technology GroupNo ratings yet
- Chapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andDocument16 pagesChapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andbakiz89No ratings yet
- People vs. PatalinDocument2 pagesPeople vs. PatalinPaul BarazonNo ratings yet
- RPH Eng Tahun 3 6 April 2021 PDPRDocument3 pagesRPH Eng Tahun 3 6 April 2021 PDPRmazlanpostNo ratings yet
- Injustice To Pre-2006 Retired Professor Pensioners by Government of PunjabDocument7 pagesInjustice To Pre-2006 Retired Professor Pensioners by Government of Punjabgssekhon9406No ratings yet
- G.R. No. 148825 December 27, 2002 People of The Philippines, Appellee, SUSAN CANTON, AppellantDocument49 pagesG.R. No. 148825 December 27, 2002 People of The Philippines, Appellee, SUSAN CANTON, AppellantB-an JavelosaNo ratings yet
- Enrollment Checklists For SHS PDFDocument4 pagesEnrollment Checklists For SHS PDFGerardo DelantarNo ratings yet
- RESEARCH NO. 2 For ATTY. EFL - RESEARCH ABOUT SEARCH WARRANT AND DRUG CASES WHERE FOREIGNERS ARE INVOLVEDDocument109 pagesRESEARCH NO. 2 For ATTY. EFL - RESEARCH ABOUT SEARCH WARRANT AND DRUG CASES WHERE FOREIGNERS ARE INVOLVEDArcie Laconico100% (1)
- Health CG - With Tagged Math Equipment 1-10Document116 pagesHealth CG - With Tagged Math Equipment 1-10Jan Aguilar EstefaniNo ratings yet
- Maxi Crack The Marketing InterviewDocument35 pagesMaxi Crack The Marketing InterviewSandeep KumarNo ratings yet
- The Benefits of Using Accounting Software in The Learning Process of Accountancy StudentsDocument2 pagesThe Benefits of Using Accounting Software in The Learning Process of Accountancy StudentsAziz Rajim BundaNo ratings yet
- TVNS Argument (Negative)Document1 pageTVNS Argument (Negative)christimyvNo ratings yet
- Pearson BTEC Sample Set Assignment BriefDocument7 pagesPearson BTEC Sample Set Assignment BriefAbdullah SattarNo ratings yet
- Decentralisation in Vietnam-Adam FfordeDocument92 pagesDecentralisation in Vietnam-Adam Ffordeapi-26649203100% (1)
- Towards Combined Arms PDFDocument235 pagesTowards Combined Arms PDFLuke Michaelis100% (1)
- UTAR Scholarships For MBBSDocument1 pageUTAR Scholarships For MBBSvolcanowizardNo ratings yet
- Learner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Document6 pagesLearner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Ralph NavelinoNo ratings yet
- Preparedness of Practice Teaching Internship of Beed Student of Central Philippines State UniverDocument15 pagesPreparedness of Practice Teaching Internship of Beed Student of Central Philippines State UniverRan TanNo ratings yet
- Organic Architecture FinalDocument29 pagesOrganic Architecture FinalAMEN SITOTAWNo ratings yet
- Shell Foundation Request For Funds: Response To ApplicantDocument2 pagesShell Foundation Request For Funds: Response To ApplicantDea DharaNo ratings yet
- Apprenticeship After General EducationDocument4 pagesApprenticeship After General Educationwaseem555No ratings yet