Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elna Service Manuals PDFDocument85 pagesElna Service Manuals PDFKen Mehl100% (1)
- Installation Guide: Global CacheDocument51 pagesInstallation Guide: Global Cacheivo radoichevNo ratings yet
- 5G NR Network Deployment Is Now - Let's Test!: Arnd Sibila Manuel MielkeDocument32 pages5G NR Network Deployment Is Now - Let's Test!: Arnd Sibila Manuel Mielkeivo radoichevNo ratings yet
- Analog Reinvented: ES9018K2M 32-Bit Stereo Mobile Audio DACDocument2 pagesAnalog Reinvented: ES9018K2M 32-Bit Stereo Mobile Audio DACivo radoichevNo ratings yet
- Surface Mount Fuse, 10.1 X 3 MM, Time-Lag T, 250 VAC, 125 VDCDocument3 pagesSurface Mount Fuse, 10.1 X 3 MM, Time-Lag T, 250 VAC, 125 VDCivo radoichevNo ratings yet
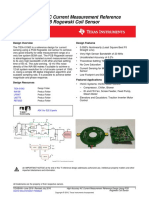
- Tidubv4a PDFDocument31 pagesTidubv4a PDFStef GaudreauNo ratings yet
- How To Find The Suitable Size of Cable & Wire - ExamplesDocument7 pagesHow To Find The Suitable Size of Cable & Wire - ExamplesShyamraj ArunNo ratings yet
- Iecex Sir 09.0028Document6 pagesIecex Sir 09.0028Francesco_CNo ratings yet
- 09 - Transformer Protection Guide PDFDocument33 pages09 - Transformer Protection Guide PDFseshatsNo ratings yet
- Basler Edm 2000 AvrDocument23 pagesBasler Edm 2000 AvrvetsasNo ratings yet
- To Prepare Pigments and Poster Paints - Chemistry Science Fair ProjectDocument6 pagesTo Prepare Pigments and Poster Paints - Chemistry Science Fair ProjectAryan AgneyNo ratings yet
- Sicam TDocument16 pagesSicam TAbber TahirNo ratings yet
- Test Process and ATE 2015Document12 pagesTest Process and ATE 2015Siva SreeramdasNo ratings yet
- Ei 1148Document2 pagesEi 1148hino_kaguNo ratings yet
- Electrostatic Discharge Susceptibility Data 1995 (Ordering No.: VZAP-95) PrefaceDocument17 pagesElectrostatic Discharge Susceptibility Data 1995 (Ordering No.: VZAP-95) PrefaceNilesh NarkhedeNo ratings yet
- Dgca Module 13 Part 02-1 PDFDocument25 pagesDgca Module 13 Part 02-1 PDFcharly kymNo ratings yet
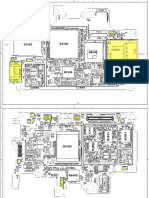
- Layout PCB Sony Xperia z1 c6902 c6903 c6906 c6943 l39h WwwlemcellcombrDocument2 pagesLayout PCB Sony Xperia z1 c6902 c6903 c6906 c6943 l39h WwwlemcellcombrDiscovery UzNo ratings yet
- Smart Power Processing For Energy Saving: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument21 pagesSmart Power Processing For Energy Saving: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanAkhilrajscribdNo ratings yet
- Gen Physics Midterm ReviewerDocument13 pagesGen Physics Midterm ReviewerKiyoshi TakeuchiNo ratings yet
- Rate Chart Updated 22.10.2020 - MASTER SHEETDocument9 pagesRate Chart Updated 22.10.2020 - MASTER SHEETSounak SardarNo ratings yet
- 1788HP-En2PA-R User Manual v1.00.02 Link Device PADocument30 pages1788HP-En2PA-R User Manual v1.00.02 Link Device PACarlos MoralesNo ratings yet
- Calibration RigDocument5 pagesCalibration RigBijoy AyyagariNo ratings yet
- Legrand Niloe Stop Kontak SaklarDocument24 pagesLegrand Niloe Stop Kontak SaklarAlfiansyah Dharma Setia DjaketraNo ratings yet
- 94 ManualDocument12 pages94 Manualmjkeyans10No ratings yet
- Project Twin T Notch Active FilterDocument4 pagesProject Twin T Notch Active FilterVirag ParekhNo ratings yet
- I-9102 Intelligent Photoelectric Smoke Detector Issue1.03Document2 pagesI-9102 Intelligent Photoelectric Smoke Detector Issue1.03Seagull MarineNo ratings yet
- Moc302x 5xDocument6 pagesMoc302x 5xMohammed ZiadNo ratings yet
- 1KW MPSG Portable Off-Grid Solar Power System - 202104Document1 page1KW MPSG Portable Off-Grid Solar Power System - 202104Alberto Chacon PinzonNo ratings yet
- Pneumatic Rotary Actuator, Single-Acting and Double-ActingDocument4 pagesPneumatic Rotary Actuator, Single-Acting and Double-Actingrema irmaNo ratings yet
- Leveling 1Document51 pagesLeveling 1ClarenceNyembaNo ratings yet
- Mason's Gain FormulaDocument4 pagesMason's Gain Formulailg1No ratings yet
- Home HTTPD Data Media-Data 8 dtxm12 en Om A0 PDFDocument116 pagesHome HTTPD Data Media-Data 8 dtxm12 en Om A0 PDFJoe OgilvyNo ratings yet