Download as pdf or txt
You might also like
- Student Exploration: WavesDocument7 pagesStudent Exploration: Wavesoctavie ahmed75% (4)
- Tips - Quantum Electronics For Atomic Physics Oxford Grad PDFDocument394 pagesTips - Quantum Electronics For Atomic Physics Oxford Grad PDFAnishNo ratings yet
- Pharis Williams - The Dynamic TheoryDocument291 pagesPharis Williams - The Dynamic TheoryptiwackNo ratings yet
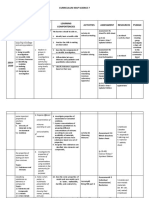
- CURRICULUM MAP Grade 7 RevisedDocument10 pagesCURRICULUM MAP Grade 7 RevisedPeterClomaJr.0% (1)
- Jacking Force CalculationDocument7 pagesJacking Force CalculationSajjad AnwarNo ratings yet
- A Method To Estimate The Jacking Force For Pipe Jacking in Sandy SoilsDocument13 pagesA Method To Estimate The Jacking Force For Pipe Jacking in Sandy SoilsmuhpratitoNo ratings yet
- Cavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDocument14 pagesCavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDavies EmmanuelNo ratings yet
- Numerical Analysisofa Small Pneumatic Hammer Performance Basedon Evaluation Methodof Friction ForceDocument11 pagesNumerical Analysisofa Small Pneumatic Hammer Performance Basedon Evaluation Methodof Friction ForceLeonardo G. DiasNo ratings yet
- Investigation of The Mechanical Response of A DeepDocument11 pagesInvestigation of The Mechanical Response of A DeepAmanda Isabela De CamposNo ratings yet
- Nuclear Engineering and Technology: Long Yun, Zhu Rongsheng, Wang DezhongDocument8 pagesNuclear Engineering and Technology: Long Yun, Zhu Rongsheng, Wang DezhongSteeven ContrerasNo ratings yet
- Influence of Radial Interference On Torque Capacity of Shrink-Fit CamshaftDocument10 pagesInfluence of Radial Interference On Torque Capacity of Shrink-Fit Camshaftarda akkayaNo ratings yet
- Jing Et Al 2019 A Feasible Study For The Working Mechanism and Parameter Optimization of The AgitatorDocument10 pagesJing Et Al 2019 A Feasible Study For The Working Mechanism and Parameter Optimization of The AgitatormuhammadaljabbarsyahNo ratings yet
- Impact Testing of Concrete - The Measurement Device: August 2014Document6 pagesImpact Testing of Concrete - The Measurement Device: August 2014MakeshNo ratings yet
- Static Metal Sealing Mechanism of A Subsea Pipeline Mechanical ConnectorDocument16 pagesStatic Metal Sealing Mechanism of A Subsea Pipeline Mechanical ConnectorHadi KoraniNo ratings yet
- Dynamic Research and Experimental Analys PDFDocument14 pagesDynamic Research and Experimental Analys PDFnajafiNo ratings yet
- Experimental Study On Propagation of Hydraulic Fracture in Volcanic Rocks Using Industrial CT TechnologyDocument4 pagesExperimental Study On Propagation of Hydraulic Fracture in Volcanic Rocks Using Industrial CT TechnologyMuhammad TaufiqurrahmanNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document12 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Eccmr 2009 Luo EtcDocument7 pagesEccmr 2009 Luo EtcSAMİ ENİS ARIOĞLUNo ratings yet
- Hybrid Modeling and Verification of Disk-Stacked SDocument12 pagesHybrid Modeling and Verification of Disk-Stacked SKhắc Trung VũNo ratings yet
- Vibroacoustics Analysis of Punching Machine Hydraulic PipingDocument10 pagesVibroacoustics Analysis of Punching Machine Hydraulic PipingFrancesca CoattiNo ratings yet
- Chen-Loading Rate Notch To Depth Effect On FlexureDocument13 pagesChen-Loading Rate Notch To Depth Effect On FlexuremaahmedNo ratings yet
- Dynamic Response of Buried Gas Pipeline Under Excavator Loading - Experimental - Numerical StudyDocument17 pagesDynamic Response of Buried Gas Pipeline Under Excavator Loading - Experimental - Numerical StudyNikita ZalevskiiNo ratings yet
- Study On Flow Dynamic Characteristic of BladderDocument13 pagesStudy On Flow Dynamic Characteristic of BladderhbshinNo ratings yet
- Stress and Deformation Characteristics of Completion and Testing Tubing String With Expansion Joints For Ultra-Deep HTHP Gas WellsDocument8 pagesStress and Deformation Characteristics of Completion and Testing Tubing String With Expansion Joints For Ultra-Deep HTHP Gas WellsabodolkuhaaNo ratings yet
- Casing Failure Mechanism During Volume Fracturing A Case Study of A Shale Gas WellDocument9 pagesCasing Failure Mechanism During Volume Fracturing A Case Study of A Shale Gas WellLuciano FucelloNo ratings yet
- DecouplingDocument13 pagesDecouplingRida AmrullohNo ratings yet
- Majumder 2024 IOP Conf. Ser. Mater. Sci. Eng. 1305 012034Document13 pagesMajumder 2024 IOP Conf. Ser. Mater. Sci. Eng. 1305 012034sayem.firstsmithcorpNo ratings yet
- Epjconf Dymat2018 02038Document6 pagesEpjconf Dymat2018 02038sanjusamsonNo ratings yet
- Effects of Valve Needle Speed On Flow Characteristics in Control Valve For Unit Pump Fuel SystemDocument10 pagesEffects of Valve Needle Speed On Flow Characteristics in Control Valve For Unit Pump Fuel SystemTrạng LêNo ratings yet
- Experimental Research On The Dynamic Instability CDocument13 pagesExperimental Research On The Dynamic Instability CshuzaoNo ratings yet
- 10.1515 - Phys 2019 0022Document8 pages10.1515 - Phys 2019 0022yjt211No ratings yet
- A New Apparatus For Large Scale Dynamic Tests On Materials: Marco Peroni Alessio Caverzan George SolomosDocument12 pagesA New Apparatus For Large Scale Dynamic Tests On Materials: Marco Peroni Alessio Caverzan George SolomosUlvyRusdHaNo ratings yet
- Influence of T-Shape Tip Clearance On Performance of A Mixed-Flow Pump.Document11 pagesInfluence of T-Shape Tip Clearance On Performance of A Mixed-Flow Pump.POOJA JAISWALNo ratings yet
- Effect of Clearance On Volumetric Efficiency in 2D Piston PumpsDocument12 pagesEffect of Clearance On Volumetric Efficiency in 2D Piston PumpsSiddharth SinghNo ratings yet
- Research Article: Wellbore Stability in Oil and Gas Drilling With Chemical-Mechanical CouplingDocument10 pagesResearch Article: Wellbore Stability in Oil and Gas Drilling With Chemical-Mechanical CouplingAhmed Nadhem AlshamsiNo ratings yet
- Radial Metal SealDocument16 pagesRadial Metal Sealansysuser2023No ratings yet
- (Open Physics) Analysis of Impact Load On Tubing and Shock Absorption During PerforatingDocument8 pages(Open Physics) Analysis of Impact Load On Tubing and Shock Absorption During Perforatingjlbarretoa100% (1)
- Kent and ParkDocument14 pagesKent and ParkJuan Pablo SalcedoNo ratings yet
- Tang Et Al 2017 PDFDocument12 pagesTang Et Al 2017 PDFSehar RehmanNo ratings yet
- SI 2015 For LUPINDocument23 pagesSI 2015 For LUPINr_saniosNo ratings yet
- Wang 2020 J. Phys. Conf. Ser. 1624 022060Document8 pagesWang 2020 J. Phys. Conf. Ser. 1624 022060AltafNo ratings yet
- 2008 Fatigue Performance of Pre-Strained Pipes With Girth Weld DefectsDocument12 pages2008 Fatigue Performance of Pre-Strained Pipes With Girth Weld DefectsotaviopntNo ratings yet
- Silva2016 Article ANovelMethodologyForObtainmentDocument5 pagesSilva2016 Article ANovelMethodologyForObtainmentCarlos Augusto Sánchez RondónNo ratings yet
- Research ArticleDocument13 pagesResearch ArticleDaniel OprutaNo ratings yet
- Experimental Test and Numerical Simulation of The Initial Crack Reinforced Concrete Beam in BendingDocument6 pagesExperimental Test and Numerical Simulation of The Initial Crack Reinforced Concrete Beam in BendingErik Wahyu PradanaNo ratings yet
- 2021-SCHM-Investigation of Tensile Fracture of Rubberized Self-Compacting Concrete by Acoustic Emission and Digital Image CorrelationDocument21 pages2021-SCHM-Investigation of Tensile Fracture of Rubberized Self-Compacting Concrete by Acoustic Emission and Digital Image CorrelationxingNo ratings yet
- SPE-172308-MS Advances in Numerical Modeling of Downhole Dynamics For Perforated Well CompletionsDocument13 pagesSPE-172308-MS Advances in Numerical Modeling of Downhole Dynamics For Perforated Well CompletionsAROLDO BERMUDEZNo ratings yet
- Applied Sciences: Ffect of Holes On Dynamic Crack Propagation UnderDocument18 pagesApplied Sciences: Ffect of Holes On Dynamic Crack Propagation UnderDhruv PatelNo ratings yet
- Pipe Stress Buriedrajeev - Pathmanathan - 3Document9 pagesPipe Stress Buriedrajeev - Pathmanathan - 3Erz ERNo ratings yet
- Balancing Drum CalculationsDocument12 pagesBalancing Drum CalculationsShirley SetshediNo ratings yet
- Evaluation of Hydrodynamic Forces On Turbine RingDocument10 pagesEvaluation of Hydrodynamic Forces On Turbine RingrajfabNo ratings yet
- CFD Study of Prospective 1st Stage Centrifugal Impeller DesignDocument6 pagesCFD Study of Prospective 1st Stage Centrifugal Impeller DesignSADULLAHNo ratings yet
- Load-Carrying Capacity Analysis On Derrick of Offshore Module Drilling RigDocument12 pagesLoad-Carrying Capacity Analysis On Derrick of Offshore Module Drilling RigpandiangvNo ratings yet
- Umair (Rough Proposal)Document11 pagesUmair (Rough Proposal)Sumair AhmadNo ratings yet
- Modelo y Dinamismo de Una Turbina de BulboDocument21 pagesModelo y Dinamismo de Una Turbina de BulboJudith Ivett Cadena FernandezNo ratings yet
- Dynamic Analysis of Top-Excited Vibration Assisted Stuck Release in Vertical BoreholeDocument37 pagesDynamic Analysis of Top-Excited Vibration Assisted Stuck Release in Vertical BoreholeengenhariainovajdNo ratings yet
- Engineering Mechanics 2012: Flow Based Vibrations of Sluice Gates - Physical and Numerical ModellingDocument8 pagesEngineering Mechanics 2012: Flow Based Vibrations of Sluice Gates - Physical and Numerical ModellingAndres Vallebella100% (1)
- Mechanical Behavior Analysis of Gas Pipeline With Defects Under Lateral LandslideDocument15 pagesMechanical Behavior Analysis of Gas Pipeline With Defects Under Lateral LandslideJaime SeguraNo ratings yet
- Numerical Investigation of Cavitation in Twin-Screw Pumps: ArticleDocument24 pagesNumerical Investigation of Cavitation in Twin-Screw Pumps: ArticleMIGUELNo ratings yet
- Analytical Approach To Predict Nonlinear Parameters For Dynamic Analysis of Structures Applied To Blast LoadsDocument19 pagesAnalytical Approach To Predict Nonlinear Parameters For Dynamic Analysis of Structures Applied To Blast LoadscemadaroNo ratings yet
- Energies 12 01523Document17 pagesEnergies 12 01523Ridouane OulhiqNo ratings yet
- Wear of Sprag Clutch Wedge in Overrun State UnderDocument17 pagesWear of Sprag Clutch Wedge in Overrun State UnderLorenzo ToccaceliNo ratings yet
- Ultrasonic Cleaning - Fundamental Theory and Application CTG Clean PDFDocument12 pagesUltrasonic Cleaning - Fundamental Theory and Application CTG Clean PDFMusunuri Ratna TejaNo ratings yet
- Wave Optics Part-1Document14 pagesWave Optics Part-1Acoustic GuyNo ratings yet
- IGCSE 2 Phy General Properties of WavesDocument102 pagesIGCSE 2 Phy General Properties of WavesKanwal KhanNo ratings yet
- Phy. Sci. Quarter 4 M34 PDFDocument18 pagesPhy. Sci. Quarter 4 M34 PDFAshlyn WilsonNo ratings yet
- History of OpticsDocument16 pagesHistory of OpticsPaulinaNo ratings yet
- B.E. (AI & ML) SyllabusDocument26 pagesB.E. (AI & ML) SyllabusJeevan SaiNo ratings yet
- EM ActivityDocument2 pagesEM ActivityAlfred NeriNo ratings yet
- B.SC - PhysicsCBCS OUDocument45 pagesB.SC - PhysicsCBCS OUMD Saif SiddNo ratings yet
- Analisis K3 BHG B Fizik SPM (2003-2016)Document3 pagesAnalisis K3 BHG B Fizik SPM (2003-2016)Red KiteNo ratings yet
- Solucionario Capitulo 21 Física Serway and FaughnDocument13 pagesSolucionario Capitulo 21 Física Serway and FaughnRafael ColindresNo ratings yet
- New UTDocument17 pagesNew UTNayan VyasNo ratings yet
- Exer 11 Physics 82Document12 pagesExer 11 Physics 82Jezreel SumagangNo ratings yet
- M39 Knig9404 Ism C39 PDFDocument22 pagesM39 Knig9404 Ism C39 PDFnorma_jeannNo ratings yet
- Development of An Ultrasonic Void Fraction Profiler: Measurement Science and TechnologyDocument14 pagesDevelopment of An Ultrasonic Void Fraction Profiler: Measurement Science and Technologybrian sanmbranoNo ratings yet
- Physics Notes2016v15 PDFDocument291 pagesPhysics Notes2016v15 PDFCurtis Patterson100% (1)
- Scope Sequence 2021 2022 ScienceDocument135 pagesScope Sequence 2021 2022 ScienceAnna Lou SabanNo ratings yet
- Detailed Lesson Plan in Science 4Document5 pagesDetailed Lesson Plan in Science 4Ma. Venus A. CarilloNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFBOSS BOSSNo ratings yet
- Development of Earthquake Early Warning System Using ADXL335 AccelerometerDocument6 pagesDevelopment of Earthquake Early Warning System Using ADXL335 Accelerometerebank ekalayaNo ratings yet
- E1106-12 Método de Prueba Estándar para La Calibración Primaria de Sensores de Emisión Acústica1Document13 pagesE1106-12 Método de Prueba Estándar para La Calibración Primaria de Sensores de Emisión Acústica1fredy lopezNo ratings yet
- Science Grade Vii 180 Days Teaching and Learning Objectives Based On K To 12 Basic Education CurriculumDocument12 pagesScience Grade Vii 180 Days Teaching and Learning Objectives Based On K To 12 Basic Education CurriculumRael LiamNo ratings yet
- Physics II - WavesDocument15 pagesPhysics II - WavesVicky Waran RajNo ratings yet
- Ultrasonic Pulse Velocity Through Concrete: Standard Test Method ForDocument4 pagesUltrasonic Pulse Velocity Through Concrete: Standard Test Method Formadan.aliNo ratings yet
- Awp - Iii-Ii - 2022Document27 pagesAwp - Iii-Ii - 2022SRHNo ratings yet
- 11.waves On A StringTheoryDocument27 pages11.waves On A StringTheoryBijimol BinuNo ratings yet
- The 1 Gulf Physics Olympiad - Theoretical Competition: Riyadh, Saudi Arabia - Monday, March 21 2016Document5 pagesThe 1 Gulf Physics Olympiad - Theoretical Competition: Riyadh, Saudi Arabia - Monday, March 21 2016Duy KhuongNo ratings yet