
Transient Stability Analysis
Transient Stability Analysis
You might also like
- Eges 215Document472 pagesEges 215Torres Jdavid100% (1)
- Measuring Solar Reflectance of Horizontal and Low-Sloped Surfaces in The FieldDocument4 pagesMeasuring Solar Reflectance of Horizontal and Low-Sloped Surfaces in The FieldEric GozzerNo ratings yet
- PTI RAW - Version 30 Manual PsseDocument49 pagesPTI RAW - Version 30 Manual PssedmauriciosNo ratings yet
- Notes On Power Generation Transmission and DistributionDocument1 pageNotes On Power Generation Transmission and DistributionVishnu Shanker100% (1)
- Item 1 - Transformer Rectifier UnitDocument8 pagesItem 1 - Transformer Rectifier UnitNoor A QasimNo ratings yet
- Pscad Model Report Breaker ArcDocument12 pagesPscad Model Report Breaker ArcratheeshkumardNo ratings yet
- Dynamic Stability Analysis of Large-Scale Power Systems PDFDocument219 pagesDynamic Stability Analysis of Large-Scale Power Systems PDFMd. Arifur KabirNo ratings yet
- TripDocument6 pagesTripbobyNo ratings yet
- ARC Flash KPI Compliance at A Large Oil and Gas CompanyDocument6 pagesARC Flash KPI Compliance at A Large Oil and Gas CompanySamara FahiraNo ratings yet
- Simulation of Statcom Devices in Pscad For Voltage Regulation IJERTV2IS111123Document4 pagesSimulation of Statcom Devices in Pscad For Voltage Regulation IJERTV2IS111123Junaid BhattiNo ratings yet
- PowerFactory 2020 Product SpecificationDocument12 pagesPowerFactory 2020 Product Specificationcaedv77No ratings yet
- Electrical Machine Design Unit1-VKDocument8 pagesElectrical Machine Design Unit1-VKSajidh M ShamsudeenNo ratings yet
- Transient Stability Analysis With PowerWorld SimulatorDocument32 pagesTransient Stability Analysis With PowerWorld SimulatorvitaxeNo ratings yet
- SM Examples and SolutionsDocument16 pagesSM Examples and SolutionsTausique SheikhNo ratings yet
- PSCAD LabDocument2 pagesPSCAD Labchautran123No ratings yet
- ABB RMU Tech SpecificationDocument4 pagesABB RMU Tech SpecificationJuned HamzaviNo ratings yet
- MV Motor Protection PDFDocument3 pagesMV Motor Protection PDFOliver HermosaNo ratings yet
- ATP Petersen Coil PracticalExerciseDocument33 pagesATP Petersen Coil PracticalExerciseGesiel SoaresNo ratings yet
- IEEE9 Buses System Simulation and Modeling in PSCADDocument4 pagesIEEE9 Buses System Simulation and Modeling in PSCAD_Alastair_No ratings yet
- Relay 66 49 Protection SettingDocument5 pagesRelay 66 49 Protection SettingRajeev ValunjkarNo ratings yet
- Transmission Line and Cables v6 PDFDocument20 pagesTransmission Line and Cables v6 PDFVenkat DegaNo ratings yet
- Diesel Generator IEEE Paper 01601575Document11 pagesDiesel Generator IEEE Paper 01601575martinpellsNo ratings yet
- The Case For Hybrid Generator GroundingDocument8 pagesThe Case For Hybrid Generator Groundingfrandr129No ratings yet
- LQR Tuning of Power System Stabilizer For Damping OscillationsDocument18 pagesLQR Tuning of Power System Stabilizer For Damping Oscillations●●●●●●●1100% (1)
- 7UM6 Gen Prot-Schemes EDocument10 pages7UM6 Gen Prot-Schemes EruslaninstNo ratings yet
- Short Circuit Report - Case 2Document15 pagesShort Circuit Report - Case 2Engineering Service100% (1)
- Analysis and Performance Assessment of 6-Pulse Inverter-Fed 3 Phase and 6-Phase Induction MachinesDocument8 pagesAnalysis and Performance Assessment of 6-Pulse Inverter-Fed 3 Phase and 6-Phase Induction MachinesEmmanuel Esteban SebanstianNo ratings yet
- Short Circuit 2.2 - Complete PDFDocument32 pagesShort Circuit 2.2 - Complete PDFMaulani CandraNo ratings yet
- Useful Formulas For PS Analysis & PF CalculationDocument7 pagesUseful Formulas For PS Analysis & PF CalculationjannumitsNo ratings yet
- Fast Methods For Transient Stability Prediction in Power SystemsDocument20 pagesFast Methods For Transient Stability Prediction in Power SystemslisusedNo ratings yet
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- Psa QB 2016-2017 Questions OnlyDocument25 pagesPsa QB 2016-2017 Questions OnlykmohanadasseNo ratings yet
- MK1 E51am017 00Document170 pagesMK1 E51am017 00Farshad MahmoudiNo ratings yet
- Relays List My ExpDocument4 pagesRelays List My ExpKaruppusamy MariNo ratings yet
- NPTEL 2012 Network Analysis and SynthesisDocument148 pagesNPTEL 2012 Network Analysis and SynthesisMahesh SinghNo ratings yet
- Report Transient Analysis2Document4 pagesReport Transient Analysis2Diego F RodríguezNo ratings yet
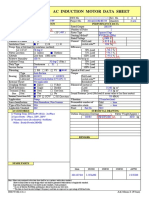
- Ac Induction Motor Data Sheet: General Specification Performance DataDocument7 pagesAc Induction Motor Data Sheet: General Specification Performance DataMayur Gupta0% (1)
- ML023030070 USNRC Power Plant Engineering 3Document170 pagesML023030070 USNRC Power Plant Engineering 3MutahirrasoolNo ratings yet
- DC Component: What Is Fault in Power System?Document8 pagesDC Component: What Is Fault in Power System?Vasudevan KunjithapathamNo ratings yet
- BHP Billiton Spence-Growth Options Project: Spence Sgo Project, Project Calculation Sheet Power System StudiesDocument419 pagesBHP Billiton Spence-Growth Options Project: Spence Sgo Project, Project Calculation Sheet Power System StudiesFelipe Serrano GonzalezNo ratings yet
- Automatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at PipavavDocument104 pagesAutomatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at Pipavavanbesivam87_49857255100% (1)
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 pagesCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNo ratings yet
- 3 Transgrid Report PDFDocument191 pages3 Transgrid Report PDF98_kingsukNo ratings yet
- البحثDocument88 pagesالبحثWoldemariam WorkuNo ratings yet
- CUK ConverterDocument4 pagesCUK Converterranjitheee1292No ratings yet
- Unified Power Flow ControllerDocument19 pagesUnified Power Flow ControllerNagendra KumarNo ratings yet
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuNo ratings yet
- Load SeddingDocument97 pagesLoad SeddingSe SamnangNo ratings yet
- 3.3kV Boards Motor Settings PDFDocument15 pages3.3kV Boards Motor Settings PDFEr Aniket HarekarNo ratings yet
- Debugging PDFDocument8 pagesDebugging PDFEdwin BaezNo ratings yet
- BatteryDocument2 pagesBatteryrasheed313No ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Design of Protection System Based On Post Fault Conditions Obtained Using Symmetrical Components MethodDocument1 pageDesign of Protection System Based On Post Fault Conditions Obtained Using Symmetrical Components Methodsetsindia3735No ratings yet
- ETAP ReportDocument11 pagesETAP Reportdaniel.cabasa25770% (1)
- ELEN3003 - Tutorial 1 Rev02Document3 pagesELEN3003 - Tutorial 1 Rev02TosikNo ratings yet
- Exp 6Document11 pagesExp 6ANAND ANKITNo ratings yet
- SimlabDocument32 pagesSimlabAkbar AliNo ratings yet
- JCSSP 2011 854 858Document5 pagesJCSSP 2011 854 858mukut_111_566238605No ratings yet
- Power Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)Document27 pagesPower Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)koti_sreedharNo ratings yet
- How To Solve Short Circuit Calculation Using Point To Point MethodDocument9 pagesHow To Solve Short Circuit Calculation Using Point To Point MethodMuhammad Irfan Ardiansyah100% (1)
- Transient StabilityDocument26 pagesTransient StabilitySarojakanti SahooNo ratings yet
- 8961A020WDocument2 pages8961A020WLTurboNo ratings yet
- Ka77drn132s4 DH Productdata en deDocument1 pageKa77drn132s4 DH Productdata en deJeison Jose Romero JimenezNo ratings yet
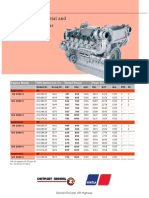
- Mtu Series 2000 IndustrialDocument2 pagesMtu Series 2000 Industrialhelen TasiopoulouNo ratings yet
- Cooling Solutions - Fan & Clutch: DatasheetDocument2 pagesCooling Solutions - Fan & Clutch: DatasheetDanNo ratings yet
- Downloaded From Manuals Search EngineDocument79 pagesDownloaded From Manuals Search EngineEmiliano Roberto Arocha CorsoNo ratings yet
- Minimum Efficiency ChillersDocument2 pagesMinimum Efficiency ChillersMarzookNo ratings yet
- John Deere 9650 Sts Parts CatalogDocument20 pagesJohn Deere 9650 Sts Parts CatalogDennis100% (66)
- What Is Sun Path DiagramDocument3 pagesWhat Is Sun Path DiagramAmor Martinez GallosNo ratings yet
- BL Bls Ma Msa MotorsDocument50 pagesBL Bls Ma Msa Motorsen262No ratings yet
- Product Information: DF150AP DF175AP DF200AP DF150A DF175A DF200ADocument8 pagesProduct Information: DF150AP DF175AP DF200AP DF150A DF175A DF200ARabbit Precision ServicesNo ratings yet
- QN Bank PhysicsDocument4 pagesQN Bank PhysicsRemusNo ratings yet
- Tugas TTT A - 1910953009 - Muhammad Fajar Ruhud ManurungDocument8 pagesTugas TTT A - 1910953009 - Muhammad Fajar Ruhud ManurungFajar AsheqafNo ratings yet
- Full Download Book Electrochemical Power Sources Fundamentals Systems and Applications Hydrogen Production by Water Electrolysis PDFDocument41 pagesFull Download Book Electrochemical Power Sources Fundamentals Systems and Applications Hydrogen Production by Water Electrolysis PDFdennis.wallace581100% (23)
- AltaBlue Touch Large MeltersDocument2 pagesAltaBlue Touch Large MeltersPah AraújoNo ratings yet
- 1.1 Roller With Brush:: Fig3.1: Design of BrushDocument7 pages1.1 Roller With Brush:: Fig3.1: Design of Brush19-317 rohit PalleNo ratings yet
- HSFTXD 5Document12 pagesHSFTXD 5Adithya K SanjeevNo ratings yet
- Manufacturing Engineering - I: Diploma Mechanical Engineering Semester: 3Document7 pagesManufacturing Engineering - I: Diploma Mechanical Engineering Semester: 3solaank16No ratings yet
- KTA50 ESN 25329037 Parts ListDocument8 pagesKTA50 ESN 25329037 Parts ListNikkikumarNo ratings yet
- Textbook Active House Smart Nearly Zero Energy Buildings Lone Feifer Ebook All Chapter PDFDocument53 pagesTextbook Active House Smart Nearly Zero Energy Buildings Lone Feifer Ebook All Chapter PDFbobbie.eastman650100% (25)
- Module - 5 Wave Energy: 12.1 GENERALDocument12 pagesModule - 5 Wave Energy: 12.1 GENERALsahitNo ratings yet
- Feng Shui in Relation To ArchitectureDocument15 pagesFeng Shui in Relation To Architecturebaclohanj2100% (1)
- 02. BẮC KẠN. (2021-2022)Document3 pages02. BẮC KẠN. (2021-2022)Thảo Lê Thị PhươngNo ratings yet
- Product Name / Title Paraflow Plate Heat Exchangers: ApvheatexchangerDocument8 pagesProduct Name / Title Paraflow Plate Heat Exchangers: ApvheatexchangerGỗ MộcNo ratings yet
- Multifuel Rotary Kiln Burner: Presented At: "1 Burner Day" 18 February 2004"Document38 pagesMultifuel Rotary Kiln Burner: Presented At: "1 Burner Day" 18 February 2004"mustafNo ratings yet
- UPS ICA CN SeriesDocument2 pagesUPS ICA CN Seriesbnsp bogor14No ratings yet
- 3Document31 pages3mehrdad khatibNo ratings yet
- Chapter 2 BIO 1510Document32 pagesChapter 2 BIO 1510Chachi CNo ratings yet
- SB-WA730GCP: Active Subwoofer SystemDocument32 pagesSB-WA730GCP: Active Subwoofer SystemEdward KepNo ratings yet





















































































Download as pdf or txt
You might also like
- Eges 215Document472 pagesEges 215Torres Jdavid100% (1)
- Measuring Solar Reflectance of Horizontal and Low-Sloped Surfaces in The FieldDocument4 pagesMeasuring Solar Reflectance of Horizontal and Low-Sloped Surfaces in The FieldEric GozzerNo ratings yet
- PTI RAW - Version 30 Manual PsseDocument49 pagesPTI RAW - Version 30 Manual PssedmauriciosNo ratings yet
- Notes On Power Generation Transmission and DistributionDocument1 pageNotes On Power Generation Transmission and DistributionVishnu Shanker100% (1)
- Item 1 - Transformer Rectifier UnitDocument8 pagesItem 1 - Transformer Rectifier UnitNoor A QasimNo ratings yet
- Pscad Model Report Breaker ArcDocument12 pagesPscad Model Report Breaker ArcratheeshkumardNo ratings yet
- Dynamic Stability Analysis of Large-Scale Power Systems PDFDocument219 pagesDynamic Stability Analysis of Large-Scale Power Systems PDFMd. Arifur KabirNo ratings yet
- TripDocument6 pagesTripbobyNo ratings yet
- ARC Flash KPI Compliance at A Large Oil and Gas CompanyDocument6 pagesARC Flash KPI Compliance at A Large Oil and Gas CompanySamara FahiraNo ratings yet
- Simulation of Statcom Devices in Pscad For Voltage Regulation IJERTV2IS111123Document4 pagesSimulation of Statcom Devices in Pscad For Voltage Regulation IJERTV2IS111123Junaid BhattiNo ratings yet
- PowerFactory 2020 Product SpecificationDocument12 pagesPowerFactory 2020 Product Specificationcaedv77No ratings yet
- Electrical Machine Design Unit1-VKDocument8 pagesElectrical Machine Design Unit1-VKSajidh M ShamsudeenNo ratings yet
- Transient Stability Analysis With PowerWorld SimulatorDocument32 pagesTransient Stability Analysis With PowerWorld SimulatorvitaxeNo ratings yet
- SM Examples and SolutionsDocument16 pagesSM Examples and SolutionsTausique SheikhNo ratings yet
- PSCAD LabDocument2 pagesPSCAD Labchautran123No ratings yet
- ABB RMU Tech SpecificationDocument4 pagesABB RMU Tech SpecificationJuned HamzaviNo ratings yet
- MV Motor Protection PDFDocument3 pagesMV Motor Protection PDFOliver HermosaNo ratings yet
- ATP Petersen Coil PracticalExerciseDocument33 pagesATP Petersen Coil PracticalExerciseGesiel SoaresNo ratings yet
- IEEE9 Buses System Simulation and Modeling in PSCADDocument4 pagesIEEE9 Buses System Simulation and Modeling in PSCAD_Alastair_No ratings yet
- Relay 66 49 Protection SettingDocument5 pagesRelay 66 49 Protection SettingRajeev ValunjkarNo ratings yet
- Transmission Line and Cables v6 PDFDocument20 pagesTransmission Line and Cables v6 PDFVenkat DegaNo ratings yet
- Diesel Generator IEEE Paper 01601575Document11 pagesDiesel Generator IEEE Paper 01601575martinpellsNo ratings yet
- The Case For Hybrid Generator GroundingDocument8 pagesThe Case For Hybrid Generator Groundingfrandr129No ratings yet
- LQR Tuning of Power System Stabilizer For Damping OscillationsDocument18 pagesLQR Tuning of Power System Stabilizer For Damping Oscillations●●●●●●●1100% (1)
- 7UM6 Gen Prot-Schemes EDocument10 pages7UM6 Gen Prot-Schemes EruslaninstNo ratings yet
- Short Circuit Report - Case 2Document15 pagesShort Circuit Report - Case 2Engineering Service100% (1)
- Analysis and Performance Assessment of 6-Pulse Inverter-Fed 3 Phase and 6-Phase Induction MachinesDocument8 pagesAnalysis and Performance Assessment of 6-Pulse Inverter-Fed 3 Phase and 6-Phase Induction MachinesEmmanuel Esteban SebanstianNo ratings yet
- Short Circuit 2.2 - Complete PDFDocument32 pagesShort Circuit 2.2 - Complete PDFMaulani CandraNo ratings yet
- Useful Formulas For PS Analysis & PF CalculationDocument7 pagesUseful Formulas For PS Analysis & PF CalculationjannumitsNo ratings yet
- Fast Methods For Transient Stability Prediction in Power SystemsDocument20 pagesFast Methods For Transient Stability Prediction in Power SystemslisusedNo ratings yet
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- Psa QB 2016-2017 Questions OnlyDocument25 pagesPsa QB 2016-2017 Questions OnlykmohanadasseNo ratings yet
- MK1 E51am017 00Document170 pagesMK1 E51am017 00Farshad MahmoudiNo ratings yet
- Relays List My ExpDocument4 pagesRelays List My ExpKaruppusamy MariNo ratings yet
- NPTEL 2012 Network Analysis and SynthesisDocument148 pagesNPTEL 2012 Network Analysis and SynthesisMahesh SinghNo ratings yet
- Report Transient Analysis2Document4 pagesReport Transient Analysis2Diego F RodríguezNo ratings yet
- Ac Induction Motor Data Sheet: General Specification Performance DataDocument7 pagesAc Induction Motor Data Sheet: General Specification Performance DataMayur Gupta0% (1)
- ML023030070 USNRC Power Plant Engineering 3Document170 pagesML023030070 USNRC Power Plant Engineering 3MutahirrasoolNo ratings yet
- DC Component: What Is Fault in Power System?Document8 pagesDC Component: What Is Fault in Power System?Vasudevan KunjithapathamNo ratings yet
- BHP Billiton Spence-Growth Options Project: Spence Sgo Project, Project Calculation Sheet Power System StudiesDocument419 pagesBHP Billiton Spence-Growth Options Project: Spence Sgo Project, Project Calculation Sheet Power System StudiesFelipe Serrano GonzalezNo ratings yet
- Automatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at PipavavDocument104 pagesAutomatic Voltage Regulator Test Instructions and Report For 2 X 129 MW, STG OF 700Mw CCPP at Pipavavanbesivam87_49857255100% (1)
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 pagesCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNo ratings yet
- 3 Transgrid Report PDFDocument191 pages3 Transgrid Report PDF98_kingsukNo ratings yet
- البحثDocument88 pagesالبحثWoldemariam WorkuNo ratings yet
- CUK ConverterDocument4 pagesCUK Converterranjitheee1292No ratings yet
- Unified Power Flow ControllerDocument19 pagesUnified Power Flow ControllerNagendra KumarNo ratings yet
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuNo ratings yet
- Load SeddingDocument97 pagesLoad SeddingSe SamnangNo ratings yet
- 3.3kV Boards Motor Settings PDFDocument15 pages3.3kV Boards Motor Settings PDFEr Aniket HarekarNo ratings yet
- Debugging PDFDocument8 pagesDebugging PDFEdwin BaezNo ratings yet
- BatteryDocument2 pagesBatteryrasheed313No ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Design of Protection System Based On Post Fault Conditions Obtained Using Symmetrical Components MethodDocument1 pageDesign of Protection System Based On Post Fault Conditions Obtained Using Symmetrical Components Methodsetsindia3735No ratings yet
- ETAP ReportDocument11 pagesETAP Reportdaniel.cabasa25770% (1)
- ELEN3003 - Tutorial 1 Rev02Document3 pagesELEN3003 - Tutorial 1 Rev02TosikNo ratings yet
- Exp 6Document11 pagesExp 6ANAND ANKITNo ratings yet
- SimlabDocument32 pagesSimlabAkbar AliNo ratings yet
- JCSSP 2011 854 858Document5 pagesJCSSP 2011 854 858mukut_111_566238605No ratings yet
- Power Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)Document27 pagesPower Systems - Basic Concepts and Applications - Part Ii: Pdhonline Course E105 (12 PDH)koti_sreedharNo ratings yet
- How To Solve Short Circuit Calculation Using Point To Point MethodDocument9 pagesHow To Solve Short Circuit Calculation Using Point To Point MethodMuhammad Irfan Ardiansyah100% (1)
- Transient StabilityDocument26 pagesTransient StabilitySarojakanti SahooNo ratings yet
- 8961A020WDocument2 pages8961A020WLTurboNo ratings yet
- Ka77drn132s4 DH Productdata en deDocument1 pageKa77drn132s4 DH Productdata en deJeison Jose Romero JimenezNo ratings yet
- Mtu Series 2000 IndustrialDocument2 pagesMtu Series 2000 Industrialhelen TasiopoulouNo ratings yet
- Cooling Solutions - Fan & Clutch: DatasheetDocument2 pagesCooling Solutions - Fan & Clutch: DatasheetDanNo ratings yet
- Downloaded From Manuals Search EngineDocument79 pagesDownloaded From Manuals Search EngineEmiliano Roberto Arocha CorsoNo ratings yet
- Minimum Efficiency ChillersDocument2 pagesMinimum Efficiency ChillersMarzookNo ratings yet
- John Deere 9650 Sts Parts CatalogDocument20 pagesJohn Deere 9650 Sts Parts CatalogDennis100% (66)
- What Is Sun Path DiagramDocument3 pagesWhat Is Sun Path DiagramAmor Martinez GallosNo ratings yet
- BL Bls Ma Msa MotorsDocument50 pagesBL Bls Ma Msa Motorsen262No ratings yet
- Product Information: DF150AP DF175AP DF200AP DF150A DF175A DF200ADocument8 pagesProduct Information: DF150AP DF175AP DF200AP DF150A DF175A DF200ARabbit Precision ServicesNo ratings yet
- QN Bank PhysicsDocument4 pagesQN Bank PhysicsRemusNo ratings yet
- Tugas TTT A - 1910953009 - Muhammad Fajar Ruhud ManurungDocument8 pagesTugas TTT A - 1910953009 - Muhammad Fajar Ruhud ManurungFajar AsheqafNo ratings yet
- Full Download Book Electrochemical Power Sources Fundamentals Systems and Applications Hydrogen Production by Water Electrolysis PDFDocument41 pagesFull Download Book Electrochemical Power Sources Fundamentals Systems and Applications Hydrogen Production by Water Electrolysis PDFdennis.wallace581100% (23)
- AltaBlue Touch Large MeltersDocument2 pagesAltaBlue Touch Large MeltersPah AraújoNo ratings yet
- 1.1 Roller With Brush:: Fig3.1: Design of BrushDocument7 pages1.1 Roller With Brush:: Fig3.1: Design of Brush19-317 rohit PalleNo ratings yet
- HSFTXD 5Document12 pagesHSFTXD 5Adithya K SanjeevNo ratings yet
- Manufacturing Engineering - I: Diploma Mechanical Engineering Semester: 3Document7 pagesManufacturing Engineering - I: Diploma Mechanical Engineering Semester: 3solaank16No ratings yet
- KTA50 ESN 25329037 Parts ListDocument8 pagesKTA50 ESN 25329037 Parts ListNikkikumarNo ratings yet
- Textbook Active House Smart Nearly Zero Energy Buildings Lone Feifer Ebook All Chapter PDFDocument53 pagesTextbook Active House Smart Nearly Zero Energy Buildings Lone Feifer Ebook All Chapter PDFbobbie.eastman650100% (25)
- Module - 5 Wave Energy: 12.1 GENERALDocument12 pagesModule - 5 Wave Energy: 12.1 GENERALsahitNo ratings yet
- Feng Shui in Relation To ArchitectureDocument15 pagesFeng Shui in Relation To Architecturebaclohanj2100% (1)
- 02. BẮC KẠN. (2021-2022)Document3 pages02. BẮC KẠN. (2021-2022)Thảo Lê Thị PhươngNo ratings yet
- Product Name / Title Paraflow Plate Heat Exchangers: ApvheatexchangerDocument8 pagesProduct Name / Title Paraflow Plate Heat Exchangers: ApvheatexchangerGỗ MộcNo ratings yet
- Multifuel Rotary Kiln Burner: Presented At: "1 Burner Day" 18 February 2004"Document38 pagesMultifuel Rotary Kiln Burner: Presented At: "1 Burner Day" 18 February 2004"mustafNo ratings yet
- UPS ICA CN SeriesDocument2 pagesUPS ICA CN Seriesbnsp bogor14No ratings yet
- 3Document31 pages3mehrdad khatibNo ratings yet
- Chapter 2 BIO 1510Document32 pagesChapter 2 BIO 1510Chachi CNo ratings yet
- SB-WA730GCP: Active Subwoofer SystemDocument32 pagesSB-WA730GCP: Active Subwoofer SystemEdward KepNo ratings yet