Download as pdf or txt
You might also like
- Explore New Paths With The CT AnalyzerDocument10 pagesExplore New Paths With The CT AnalyzerfernandoquecaNo ratings yet
- 2 Michel Thomas Spanish AdvancedDocument48 pages2 Michel Thomas Spanish Advancedsanjacarica100% (2)
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
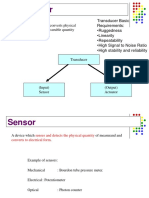
- Chapter 5 SensorsDocument46 pagesChapter 5 SensorsKetul ShahNo ratings yet
- Offshore Engineer-February 2015Document84 pagesOffshore Engineer-February 2015ilkerkozturk100% (2)
- Ultrasonic Sensor For Level MeasurementDocument34 pagesUltrasonic Sensor For Level MeasurementAshish RawatNo ratings yet
- Eddycurrentsensor PCB SENSOR 2010Document8 pagesEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiNo ratings yet
- Topic 6 Sensors Learning Outcomes: at The End of This Topic, You Should Be Able ToDocument78 pagesTopic 6 Sensors Learning Outcomes: at The End of This Topic, You Should Be Able ToAmirul ZahariNo ratings yet
- Surface Micro Machined AccelerometersDocument10 pagesSurface Micro Machined AccelerometersjamsNo ratings yet
- Introduction To Instrumentation (Eeng4183) : by Tesfamichael ADocument24 pagesIntroduction To Instrumentation (Eeng4183) : by Tesfamichael ADagnachew AzeneNo ratings yet
- PotM 2018 01 Diagnostic Measurem On ITs ENUDocument19 pagesPotM 2018 01 Diagnostic Measurem On ITs ENURencziVera100% (1)
- Calculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150Document10 pagesCalculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150Vishnu ShankerNo ratings yet
- FMSS Midterm 2Document74 pagesFMSS Midterm 2Mitchnikof NikolaoNo ratings yet
- Mechanical Transducers: AccelerometersDocument13 pagesMechanical Transducers: Accelerometersvijayamkulkarni86No ratings yet
- MWE Exp 4Document6 pagesMWE Exp 4krNo ratings yet
- Review Article: Advances in High-Resolution Microscale Impedance SensorsDocument16 pagesReview Article: Advances in High-Resolution Microscale Impedance SensorsgpaivNo ratings yet
- Review Article: Advances in High-Resolution Microscale Impedance SensorsDocument16 pagesReview Article: Advances in High-Resolution Microscale Impedance SensorsgpaivNo ratings yet
- 3.EI 6401 - April 16 - TR Key FinalDocument23 pages3.EI 6401 - April 16 - TR Key FinalAnonymous yO7rcec6vuNo ratings yet
- 7.piezoelectric, Accelerometer and Laser SensorsDocument13 pages7.piezoelectric, Accelerometer and Laser SensorsEnergya CorporacionNo ratings yet
- Mechanical Quantities Important in Measurements With SensorsDocument17 pagesMechanical Quantities Important in Measurements With SensorsachimedesxNo ratings yet
- Emg 2505 - PDF4Document19 pagesEmg 2505 - PDF4IanNo ratings yet
- MSC Sensors & Electronic InstrumentationDocument29 pagesMSC Sensors & Electronic InstrumentationNguyễn Thị Tài LinhNo ratings yet
- Wideband Resistive Voltage Divider For A Standard Wattmeter: Journal of Physics: Conference SeriesDocument8 pagesWideband Resistive Voltage Divider For A Standard Wattmeter: Journal of Physics: Conference SeriesAngel SamanthaNo ratings yet
- Performance Enhancement of Capacitive-Type Torque Sensor by Using Resonant CircuitDocument10 pagesPerformance Enhancement of Capacitive-Type Torque Sensor by Using Resonant CircuitM. T.No ratings yet
- Wu 2017Document4 pagesWu 2017Moish KumarNo ratings yet
- Describe Different Types of AccelerometersDocument7 pagesDescribe Different Types of AccelerometersRotin PierreNo ratings yet
- SensorsDocument44 pagesSensorsnaveen manupuriNo ratings yet
- TN 324: Intelligent InstrumentationDocument27 pagesTN 324: Intelligent InstrumentationAlango Jr TzNo ratings yet
- Presentation On Sensors and ActuatorsDocument115 pagesPresentation On Sensors and ActuatorschibuikeNo ratings yet
- Transduser Projects Call 09952749533Document42 pagesTransduser Projects Call 09952749533setsindia3735No ratings yet
- Advances in Fluxgate Sensors: Pavel RipkaDocument7 pagesAdvances in Fluxgate Sensors: Pavel RipkaJose AlaezNo ratings yet
- Paper8 PDFDocument14 pagesPaper8 PDFSkp FANo ratings yet
- Design and Characterization of A Passive Wireless Strain SensorDocument9 pagesDesign and Characterization of A Passive Wireless Strain SensorPhong Đào Văn HoàngNo ratings yet
- CH 3 Sensors and Applications IDocument20 pagesCH 3 Sensors and Applications Idagmawi gebrewoldNo ratings yet
- Biomedical Sensors PDFDocument14 pagesBiomedical Sensors PDFBMT0% (1)
- IRJET Partial Discharge Detection TechniDocument6 pagesIRJET Partial Discharge Detection TechnisunilNo ratings yet
- Cross Field Tubes and Microwave Semiconductor DevicesDocument74 pagesCross Field Tubes and Microwave Semiconductor DevicesPranav KasliwalNo ratings yet
- Calculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150 PDFDocument9 pagesCalculations For Short Circuit Withstand Capability of A Distribution Transformer 0976 4860 2 142 150 PDFsNo ratings yet
- Optimum Design of The Current-Source Flyback Inverter For Decentralized Grid-Connected Photovoltaic SystemsDocument13 pagesOptimum Design of The Current-Source Flyback Inverter For Decentralized Grid-Connected Photovoltaic SystemsAaqib Ahmad QureshiNo ratings yet
- TransducerDocument34 pagesTransducerVicky VishwakarmaNo ratings yet
- Ultrasensitive High Sensitivity Dielectric Filled Lamé Mode Resonator For Chemical and Biological ApplicationsDocument4 pagesUltrasensitive High Sensitivity Dielectric Filled Lamé Mode Resonator For Chemical and Biological ApplicationssundarmeenakshiNo ratings yet
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 pagesEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookNo ratings yet
- Maths Application SumsDocument36 pagesMaths Application SumsBalakamuNo ratings yet
- Lecture 6 Sensors CH 2Document50 pagesLecture 6 Sensors CH 2api-27535945100% (3)
- تنزيلDocument10 pagesتنزيلMohammed Saci ChabaniNo ratings yet
- Development of A Rotating Shaft Torque Sensor For Automotive ApplicationsDocument5 pagesDevelopment of A Rotating Shaft Torque Sensor For Automotive ApplicationsCigifarmNo ratings yet
- Photodetector Diodes: Marjan Alavi School of Electrical Engineering Sharif University of TechnologyDocument31 pagesPhotodetector Diodes: Marjan Alavi School of Electrical Engineering Sharif University of Technologyapi-3717843No ratings yet
- Strain Gauge Based Accelerometer PDFDocument13 pagesStrain Gauge Based Accelerometer PDFMarcell LandryNo ratings yet
- Mass Loading EffectDocument4 pagesMass Loading EffectGrudge stanleyNo ratings yet
- ABCsof Vibration TransducersDocument4 pagesABCsof Vibration Transducersambresh.09No ratings yet
- Nagahama - IWATSU - Core Loss Measurement On High Phase Angle MaterialDocument20 pagesNagahama - IWATSU - Core Loss Measurement On High Phase Angle Materialivanlawms6745No ratings yet
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- Mwe Chapter 4Document74 pagesMwe Chapter 4bhavaniNo ratings yet
- Sensors TransducersDocument64 pagesSensors TransducersDeep SinghNo ratings yet
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocument81 pagesBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNo ratings yet
- Transduction PrinciplesDocument14 pagesTransduction PrinciplesNavin KaranthNo ratings yet
- Displacement and Position SensorsDocument14 pagesDisplacement and Position SensorsMSuperManNo ratings yet
- MCT301 Lecturer Note On Mechatronics-Ilovepdf-Compressed - RemovedDocument61 pagesMCT301 Lecturer Note On Mechatronics-Ilovepdf-Compressed - RemovedBaran TurgayNo ratings yet
- Variable Pulse Width Piezoelectric Ultrasonic TR PDFDocument5 pagesVariable Pulse Width Piezoelectric Ultrasonic TR PDFMoriartyNo ratings yet
- 13 3friedman PDFDocument20 pages13 3friedman PDFfreedownloads1No ratings yet
- Amyand's HerniaDocument5 pagesAmyand's HerniamonoarulNo ratings yet
- Internship Report On GPDocument45 pagesInternship Report On GPpavel2051No ratings yet
- All The World's A StageDocument9 pagesAll The World's A StagesonynmurthyNo ratings yet
- Create BAPI TutorialDocument28 pagesCreate BAPI TutorialRoberto Trejos GonzalezNo ratings yet
- UIL Calculator Applications Study ListDocument7 pagesUIL Calculator Applications Study ListRocket FireNo ratings yet
- A Conversation Explaining BiomimicryDocument6 pagesA Conversation Explaining Biomimicryapi-3703075100% (2)
- Course Guide For Simplified Accounting For Entrepreneurs & Professionals (Safe&P)Document7 pagesCourse Guide For Simplified Accounting For Entrepreneurs & Professionals (Safe&P)Darwin Dionisio ClementeNo ratings yet
- Chapter 2: Decision MakingDocument16 pagesChapter 2: Decision Makingafzal_aNo ratings yet
- GRADE 8 NotesDocument5 pagesGRADE 8 NotesIya Sicat PatanoNo ratings yet
- Passive VoiceDocument18 pagesPassive VoicengawurNo ratings yet
- 2021 WA2 Science (Physics) 3E ModifiedDocument13 pages2021 WA2 Science (Physics) 3E ModifiedfinNo ratings yet
- Quasi JudicialDocument2 pagesQuasi JudicialMich Angeles100% (1)
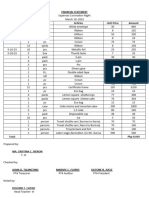
- Financial Statement Coronation NightDocument8 pagesFinancial Statement Coronation NightRuel Gapuz ManzanoNo ratings yet
- English Activity 1Document13 pagesEnglish Activity 1Mika ValenciaNo ratings yet
- Second Practice First Partial English IIIDocument5 pagesSecond Practice First Partial English IIICamiloNo ratings yet
- Various Artists - The Joy of ClassicsDocument82 pagesVarious Artists - The Joy of ClassicsCarlos Toledo88% (16)
- Recruitment Requisition FormDocument1 pageRecruitment Requisition FormrahulNo ratings yet
- SAE-J524, 525, 526, 365 Tubing Pressure RatingDocument1 pageSAE-J524, 525, 526, 365 Tubing Pressure RatingSamuel RochetteNo ratings yet
- Ecosystem Services From Biodiversity To Society Part 2 1St Edition Bohan Full ChapterDocument67 pagesEcosystem Services From Biodiversity To Society Part 2 1St Edition Bohan Full Chapterharold.eychaner940100% (14)
- OB - Lect4 - ch5Document19 pagesOB - Lect4 - ch5Nahed AbduallahNo ratings yet
- TheReader 2018-2019 Q1Document127 pagesTheReader 2018-2019 Q1Domitila RamosNo ratings yet
- Abhinavagupta (C. 950 - 1016 CEDocument8 pagesAbhinavagupta (C. 950 - 1016 CEthewitness3No ratings yet
- Jescspsu 08Document11 pagesJescspsu 08Alok RanjanNo ratings yet
- Author Research Paper IntroductionDocument6 pagesAuthor Research Paper Introductiongw08nnfr100% (1)
- Paper 8911Document8 pagesPaper 8911IJARSCT JournalNo ratings yet
- Light Sport Aircraft: Standard Terminology ForDocument6 pagesLight Sport Aircraft: Standard Terminology ForAhmad Zubair RasulyNo ratings yet
- KPSEA NominalRoll SCHDocument3 pagesKPSEA NominalRoll SCHjared odhiamboNo ratings yet