Download as pdf or txt
You might also like
- IB Chemistry IA: EnergeticsDocument10 pagesIB Chemistry IA: EnergeticsMomina Amjad88% (56)
- Hadler J B.prediction of Power .1966.TRANSDocument48 pagesHadler J B.prediction of Power .1966.TRANSAnonymous gxAd4li100% (1)
- Daftar Biaya Sewa Peralatan Per Jam KerjaDocument2 pagesDaftar Biaya Sewa Peralatan Per Jam KerjaZhafran Khatama92% (12)
- The Transverse Dynamic Stability of Hard-Chine Planing Craft PDFDocument12 pagesThe Transverse Dynamic Stability of Hard-Chine Planing Craft PDFДмитрий КирзуновNo ratings yet
- ABS - HSC - Craft Intended To Carry Passengers - Bilge SystemDocument1 pageABS - HSC - Craft Intended To Carry Passengers - Bilge SystemDanilo ContrerasNo ratings yet
- MAXSURF Resistance Quickstart TRNC02330-1-0001Document8 pagesMAXSURF Resistance Quickstart TRNC02330-1-0001RamkumarNo ratings yet
- Types of High Speed Marine CraftDocument2 pagesTypes of High Speed Marine CraftAnonymous e3ceN15No ratings yet
- Small Craft Design Guide - 1977Document136 pagesSmall Craft Design Guide - 1977Maurizio BernasconiNo ratings yet
- Ship Design & Construction - SNAMEDocument9 pagesShip Design & Construction - SNAMEBrian FreemanNo ratings yet
- Review of Ship Structural Details SSC-266Document330 pagesReview of Ship Structural Details SSC-266Kurt ZarwellNo ratings yet
- An Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFDocument63 pagesAn Experimental and Theoritical Study of Planning Surfaces With Trim Flaps PDFGhalih Rasyid Prayogo100% (1)
- Boat Propeller & Propulsion Terminology: DiameterDocument7 pagesBoat Propeller & Propulsion Terminology: DiameterDominic VillamanteNo ratings yet
- Estimation of Displacement and Main DimensionsDocument32 pagesEstimation of Displacement and Main DimensionsBayram Aslan100% (1)
- Understanding Boat Design 72 PDFDocument1 pageUnderstanding Boat Design 72 PDFŁukasz ZygielNo ratings yet
- Ship Hydrodynamics Lecture Notes Part 4 Propeller Basic Design3Document6 pagesShip Hydrodynamics Lecture Notes Part 4 Propeller Basic Design3MahdiNo ratings yet
- 3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008Document8 pages3rd Paper Shallow Water Effect On Turning Motion of A Pusher Barge System Aphydro 2008kostas.michaNo ratings yet
- Advanced Degaussing SystemsDocument8 pagesAdvanced Degaussing Systemsaks180181No ratings yet
- High Speed Vessel RuddersDocument12 pagesHigh Speed Vessel RuddersbiondavNo ratings yet
- A Method of Calculation of Ship Resistance On Calm Water Useful at Preliminary Stages of Ship DesignDocument6 pagesA Method of Calculation of Ship Resistance On Calm Water Useful at Preliminary Stages of Ship DesignGoutam Kumar Saha100% (1)
- Hiper2010 MelbourneDocument310 pagesHiper2010 MelbournemaciuluNo ratings yet
- Ocean Eagle 43MHDocument2 pagesOcean Eagle 43MHB7r100% (1)
- ECR-Presentation - Paper WriteDocument84 pagesECR-Presentation - Paper WritePhillip David Ormeño Vasquez100% (1)
- FAO Small VSL StabilityDocument64 pagesFAO Small VSL StabilityibrafeeuNo ratings yet
- Z Drive TechnologyDocument16 pagesZ Drive Technologyebey_endun100% (1)
- Z D Hub Diameter AE /ao Tl.e. Tt.e. R Pitch: R/R C A B R T CR - Ar Ar-BrDocument3 pagesZ D Hub Diameter AE /ao Tl.e. Tt.e. R Pitch: R/R C A B R T CR - Ar Ar-BrFrozen NaiveNo ratings yet
- RudderDocument24 pagesRudderPrince AbanidNo ratings yet
- FRP Ship RuleDocument103 pagesFRP Ship Rulereza84No ratings yet
- Gen B-Series Propellers KT-KQ CurvesDocument115 pagesGen B-Series Propellers KT-KQ CurvesMohd Nyxam100% (1)
- Hull Form Design and OptimizationDocument34 pagesHull Form Design and OptimizationMohamed FouadNo ratings yet
- BHP tr2Document72 pagesBHP tr2Sutan AdityaNo ratings yet
- Volcanic Alliance Bro 200311 PDFDocument4 pagesVolcanic Alliance Bro 200311 PDFRexx MexxNo ratings yet
- Abs Steel Vessel River RulesDocument448 pagesAbs Steel Vessel River Rulesluis-12No ratings yet
- NavCad Premium - HydroCompDocument5 pagesNavCad Premium - HydroCompTi Annel0% (1)
- K321-05041 A2 - Electrical Load AnalysisDocument4 pagesK321-05041 A2 - Electrical Load AnalysisJerome EugeneNo ratings yet
- Water Tank SizeDocument1 pageWater Tank SizeTerence LeongNo ratings yet
- Concealed Duct Spec Sheet A4 - Print CompressedDocument2 pagesConcealed Duct Spec Sheet A4 - Print CompressedJames HillNo ratings yet
- Ray/Thrissur-Kuttippuram/Bbs Sheet: Page 1 of 3Document3 pagesRay/Thrissur-Kuttippuram/Bbs Sheet: Page 1 of 3Pradeep Kumar TKNo ratings yet
- Costing 458 - R1-02-03-19Document10 pagesCosting 458 - R1-02-03-19Rakesh SharmaNo ratings yet
- Aanugandu - Uwr DredgingDocument1 pageAanugandu - Uwr Dredgingsasikumarcivil1996No ratings yet
- Brosur Pompa SentrifugalDocument2 pagesBrosur Pompa SentrifugallinggaffNo ratings yet
- Masine I Njihove Karakteristike PDFDocument21 pagesMasine I Njihove Karakteristike PDFZoran DjurdjevicNo ratings yet
- Kagaoan Bill of QuantitiesDocument10 pagesKagaoan Bill of QuantitiesMichael EncarnacionNo ratings yet
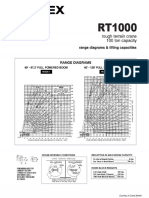
- Terex-Rt 1000 - Rough-Terrain-Cranes-Spec-25ef73Document8 pagesTerex-Rt 1000 - Rough-Terrain-Cranes-Spec-25ef73Eli DanNo ratings yet
- Electric Balance Tb. Virgo Power - 08Document3 pagesElectric Balance Tb. Virgo Power - 08Mukty BaktiarNo ratings yet
- Brosur sw770 - 1419492808Document2 pagesBrosur sw770 - 1419492808ardiansyah arfahNo ratings yet
- 30 300 G7028SR3Document1 page30 300 G7028SR3ERASMO PEREZ IZQUIERDONo ratings yet
- All in One - ESDocument45 pagesAll in One - ESJumber PonceNo ratings yet
- Stratigraphic 16 LithDocument1 pageStratigraphic 16 LithHeiman Alfredo Paz OrtegaNo ratings yet
- Fuel and Payload Planner: Fuel Plan Trip DetailsDocument18 pagesFuel and Payload Planner: Fuel Plan Trip DetailsJavierNo ratings yet
- Alveolate Motor: SpecificationsDocument1 pageAlveolate Motor: Specificationssieged_rj3165No ratings yet
- Bid Form - Trees - T3 - Electrical and Auxiliary WorksDocument1 pageBid Form - Trees - T3 - Electrical and Auxiliary WorksMike AdvinculaNo ratings yet
- Per LH845-60Document3 pagesPer LH845-60andresNo ratings yet
- 560-1 Load ChartDocument12 pages560-1 Load Chartjmsmech0% (1)
- AA General ARG45RLB3 PDFDocument24 pagesAA General ARG45RLB3 PDFpanquenitoNo ratings yet
- Nilai Perbandingan Beban Dan Deformasi Hasil Analisis ANSYS ED 9.0Document6 pagesNilai Perbandingan Beban Dan Deformasi Hasil Analisis ANSYS ED 9.0Syh TfkNo ratings yet
- Bar Bending Schedule For Portion BDocument23 pagesBar Bending Schedule For Portion Bsurendra_pangaNo ratings yet
- VT SeriesDocument2 pagesVT SeriesPTY EntertainmentNo ratings yet
- RS1 RS2 RS3 RS4 RS5 RS6 RS7 RS8 RS9 RS10 RS11 RS12 RS13 RS14 RS15 RS16 RS17 RS18 RS19 RS20Document4 pagesRS1 RS2 RS3 RS4 RS5 RS6 RS7 RS8 RS9 RS10 RS11 RS12 RS13 RS14 RS15 RS16 RS17 RS18 RS19 RS20Munish GaurNo ratings yet
- Quotation: ITM Part No Discription Qty Req Qty Ava Unit Price Ext Price DisDocument2 pagesQuotation: ITM Part No Discription Qty Req Qty Ava Unit Price Ext Price DisTharindu gangenathNo ratings yet
- Trim and StabilityDocument8 pagesTrim and StabilityAsh ganNo ratings yet
- S.No Canadian Solar USD/watt PKR/watt WattDocument24 pagesS.No Canadian Solar USD/watt PKR/watt WattUsama SaleemNo ratings yet
- T R U F: Vibration 45Document7 pagesT R U F: Vibration 45Juan SilvaNo ratings yet
- 1 - Preliminary DesignDocument10 pages1 - Preliminary DesignJuan SilvaNo ratings yet
- Revista Ingenieria Naval 201102 19Document5 pagesRevista Ingenieria Naval 201102 19Juan SilvaNo ratings yet
- Chapter 13/ Escort VesselsDocument20 pagesChapter 13/ Escort VesselsJuan SilvaNo ratings yet
- SECTION 1 General................................................................................ 135Document36 pagesSECTION 1 General................................................................................ 135Juan SilvaNo ratings yet
- E N 3 5 8 S H I P S T R U C T U R e S N o T e S F o R A N U N D e R G R A D U A T e C o U R S eDocument14 pagesE N 3 5 8 S H I P S T R U C T U R e S N o T e S F o R A N U N D e R G R A D U A T e C o U R S eJuan SilvaNo ratings yet
- 2 - Estimation of General Characteristics of Fishing Vessels BDocument18 pages2 - Estimation of General Characteristics of Fishing Vessels BJuan SilvaNo ratings yet
- Frequency Natural M K N: 28 VibrationDocument10 pagesFrequency Natural M K N: 28 VibrationJuan SilvaNo ratings yet
- 4 Criteria, Measurements, and Posttrial Corrections: 52 VibrationDocument6 pages4 Criteria, Measurements, and Posttrial Corrections: 52 VibrationJuan SilvaNo ratings yet
- U K M H: 58 VibrationDocument15 pagesU K M H: 58 VibrationJuan SilvaNo ratings yet
- Wake Effect-The Effect of Changing The Wake Inflow To: 38 VibrationDocument7 pagesWake Effect-The Effect of Changing The Wake Inflow To: 38 VibrationJuan SilvaNo ratings yet
- E R L e R L R L R L: 18 VibrationDocument10 pagesE R L e R L R L R L: 18 VibrationJuan SilvaNo ratings yet
- Strength of Ships and Ocean Structures 183Document19 pagesStrength of Ships and Ocean Structures 183Juan SilvaNo ratings yet
- Section 5 Reliability and Structural Safety Assessment: 5.1 Uncertainty Associated With The Design VariablesDocument14 pagesSection 5 Reliability and Structural Safety Assessment: 5.1 Uncertainty Associated With The Design VariablesJuan SilvaNo ratings yet
- 2 Theory and Concepts: Vibration 3Document15 pages2 Theory and Concepts: Vibration 3Juan SilvaNo ratings yet
- 202 The Principles of Naval Architecture Series: 6.2.1 Classification Societies RulesDocument33 pages202 The Principles of Naval Architecture Series: 6.2.1 Classification Societies RulesJuan SilvaNo ratings yet
- 168 The Principles of Naval Architecture Series: 5.6 Collision and GroundingDocument15 pages168 The Principles of Naval Architecture Series: 5.6 Collision and GroundingJuan SilvaNo ratings yet
- Strength of Ships and Ocean Structures 119: 3.16.2.3 Very Fine Mesh Local ModelDocument15 pagesStrength of Ships and Ocean Structures 119: 3.16.2.3 Very Fine Mesh Local ModelJuan SilvaNo ratings yet
- Section 4 Load Carrying Capability and Structural Performance CriteriaDocument20 pagesSection 4 Load Carrying Capability and Structural Performance CriteriaJuan SilvaNo ratings yet
- E d θ dx d θ dx: Strength Of Ships And Ocean Structures 75Document17 pagesE d θ dx d θ dx: Strength Of Ships And Ocean Structures 75Juan SilvaNo ratings yet
- 92 The Principles of Naval Architecture Series: 3.13 Stress ConcentrationDocument19 pages92 The Principles of Naval Architecture Series: 3.13 Stress ConcentrationJuan SilvaNo ratings yet
- 28 The Principles of Naval Architecture SeriesDocument26 pages28 The Principles of Naval Architecture SeriesJuan SilvaNo ratings yet
- 54 The Principles of Naval Architecture SeriesDocument21 pages54 The Principles of Naval Architecture SeriesJuan SilvaNo ratings yet
- A 0 B Sin PCR EI L 0: 56 3 Strength EvaluationDocument25 pagesA 0 B Sin PCR EI L 0: 56 3 Strength EvaluationJuan SilvaNo ratings yet
- Torsional Strength: Photo 4.1Document5 pagesTorsional Strength: Photo 4.1Juan SilvaNo ratings yet
- 3.5.6 Straight Type and Circular Type Construction: 3.5 Transverse Strength of Tanker 403Document13 pages3.5.6 Straight Type and Circular Type Construction: 3.5 Transverse Strength of Tanker 403Juan SilvaNo ratings yet
- ApplicationsDocument11 pagesApplicationsJuan SilvaNo ratings yet
- Design of PillarsDocument15 pagesDesign of PillarsJuan SilvaNo ratings yet
- Shell Structure: 5.1 Thickness of Shell PlatesDocument8 pagesShell Structure: 5.1 Thickness of Shell PlatesJuan SilvaNo ratings yet
- 286 8 Deflection of Hull StructuresDocument11 pages286 8 Deflection of Hull StructuresJuan SilvaNo ratings yet
- E-FSA Addressable FA Panel Quick Configuration Sheet: Put Together A System in 5 StepsDocument37 pagesE-FSA Addressable FA Panel Quick Configuration Sheet: Put Together A System in 5 StepsLuis HuertaNo ratings yet
- Kami Export - Floor Plan Reading Guide WorksheetDocument1 pageKami Export - Floor Plan Reading Guide WorksheetGabriel ParksNo ratings yet
- MO Updates For Media December 2023 ResultDocument21 pagesMO Updates For Media December 2023 Resultsinnyen.hengNo ratings yet
- SAErotorsDocument2 pagesSAErotorsRAHUL_AGRAWALNo ratings yet
- Belled Pile SpecDocument4 pagesBelled Pile SpeczataullahNo ratings yet
- Is There An Environmental Benefit From Remediation of A Contaminated SiteDocument12 pagesIs There An Environmental Benefit From Remediation of A Contaminated SiteTecnohidro Engenharia AmbientalNo ratings yet
- 8096CRSN3 25 - Factsheet e PDFDocument2 pages8096CRSN3 25 - Factsheet e PDFLuis MirandaNo ratings yet
- Field Test - Vane Shear TestDocument2 pagesField Test - Vane Shear Testhavocsnsd0% (1)
- Ensor Ccording O: PT 100 S A T EN 60751 - DIN 43760Document4 pagesEnsor Ccording O: PT 100 S A T EN 60751 - DIN 43760agus kurniawanNo ratings yet
- 1a Lista de Exercicios Mario PazDocument8 pages1a Lista de Exercicios Mario PazPaulo Henrique Silva dos SantosNo ratings yet
- Document in EDI Process Overview - v5 - Compatibility ModeDocument11 pagesDocument in EDI Process Overview - v5 - Compatibility Modevishnu_spicNo ratings yet
- D2 Use CasesDocument27 pagesD2 Use Casesለዛ ፍቅርNo ratings yet
- Datasheet Viscosity Compensating Flow Meter Switch VKGDocument4 pagesDatasheet Viscosity Compensating Flow Meter Switch VKGJairo MoralesNo ratings yet
- Civil Engineers Letter of Reference For MastersDocument2 pagesCivil Engineers Letter of Reference For MastersSyed ShaheenNo ratings yet
- Certificate of Calibration: Customer InformationDocument2 pagesCertificate of Calibration: Customer InformationSazzath HossainNo ratings yet
- Transportation, Transshipment, and Assignment Problems: Chapter TopicsDocument20 pagesTransportation, Transshipment, and Assignment Problems: Chapter TopicsHaseeb AhmedNo ratings yet
- EMS Client Upgrade 20191002Document25 pagesEMS Client Upgrade 20191002StaNo ratings yet
- High Altitude Aeronautical Platform Systems (Presentation)Document30 pagesHigh Altitude Aeronautical Platform Systems (Presentation)Mahenoor SiddiquiNo ratings yet
- Listening Test 1 Script: Section 1Document7 pagesListening Test 1 Script: Section 1yeNo ratings yet
- Scout Prop Building InstructionsDocument14 pagesScout Prop Building Instructionsindependent_mindNo ratings yet
- Accounting VoucherDocument6 pagesAccounting VoucherSATYA NARAYAN BAGARIANo ratings yet
- Audi 1992-1996 - MPI Fuel Injection and Ignition System (6-Cylinder) 07.94 Engine ID AAHDocument199 pagesAudi 1992-1996 - MPI Fuel Injection and Ignition System (6-Cylinder) 07.94 Engine ID AAHnenume 00No ratings yet
- Unit 1-Engineering-Whats It All AboutDocument6 pagesUnit 1-Engineering-Whats It All AboutdanaNo ratings yet
- F4Physics Test2 (2016)Document10 pagesF4Physics Test2 (2016)TS Shong100% (1)
- Rib DeckDocument38 pagesRib DeckUntuksign UpsajaNo ratings yet
- Space MGMTDocument15 pagesSpace MGMTDiana MocicaNo ratings yet
- Pulse-Width Modulation Inverters: Pulse-Width Modulation Is The Process of Modifying The Width of The Pulses in A PulseDocument7 pagesPulse-Width Modulation Inverters: Pulse-Width Modulation Is The Process of Modifying The Width of The Pulses in A PulseEngrAneelKumarAkhani100% (1)
- Difference Between Struts 1 and Struts 2 FrameworkDocument3 pagesDifference Between Struts 1 and Struts 2 FrameworkmihirhotaNo ratings yet
- DIY Car Painting TipsDocument9 pagesDIY Car Painting TipsJohn BrownNo ratings yet