Download as docx, pdf, or txt
You might also like
- C Mobility Express 2802i Configuration Steps 15-10-2019-bDocument2 pagesC Mobility Express 2802i Configuration Steps 15-10-2019-bmd shoeb50% (2)
- Technology, Globalization and The Basic Economic ProblemDocument2 pagesTechnology, Globalization and The Basic Economic ProblemNadia Abdul86% (7)
- Ideco h25 Technical SpecsDocument20 pagesIdeco h25 Technical SpecsSergio Fabian VasicekNo ratings yet
- Bee: A 95-mg Four-Winged Insect-Scale Flying Robot Driven by Twinned Unimorph ActuatorsDocument8 pagesBee: A 95-mg Four-Winged Insect-Scale Flying Robot Driven by Twinned Unimorph ActuatorsAnnisa HarahapNo ratings yet
- Festo BionicOpter en PDFDocument6 pagesFesto BionicOpter en PDFChin Yao WeiNo ratings yet
- The Entomopter: January 2002Document29 pagesThe Entomopter: January 2002Varun Karthikeyan ShettyNo ratings yet
- FYP OrnithopterDocument22 pagesFYP OrnithopterFaisal Saleh RazaNo ratings yet
- A 79.7g Manipulator Prototype For E-Flap Robot A Plucking-Leaf ApplicationDocument9 pagesA 79.7g Manipulator Prototype For E-Flap Robot A Plucking-Leaf ApplicationNisha KamarajNo ratings yet
- Flapping Flight For Biomimetic Robotic Insects: Part I-System ModelingDocument13 pagesFlapping Flight For Biomimetic Robotic Insects: Part I-System ModelingPhạm Quốc BảoNo ratings yet
- Design of The First Sub-Milligram Flapping Wing Aerial VehicleDocument4 pagesDesign of The First Sub-Milligram Flapping Wing Aerial VehicleGaston GBNo ratings yet
- Bi Plane MAVDocument4 pagesBi Plane MAVYathishYmNo ratings yet
- Flying Robot Seminar ReportDocument28 pagesFlying Robot Seminar ReportMahaManthraNo ratings yet
- Irjet V7i8156Document5 pagesIrjet V7i8156yogesh yogeNo ratings yet
- Ecwp MicroprojectDocument24 pagesEcwp MicroprojectrudraraichaNo ratings yet
- Introduction To Aerial RoboticsDocument31 pagesIntroduction To Aerial RoboticstommyrutagiraNo ratings yet
- Fasteners in The Aerospace Industry: Automated Systems in Fastener TechnologyDocument14 pagesFasteners in The Aerospace Industry: Automated Systems in Fastener Technologyudaykumar8995No ratings yet
- 81-Designing A System For Mobile Manipulation FromDocument6 pages81-Designing A System For Mobile Manipulation FromHaider AliNo ratings yet
- Design of A Drone With A Robotic End-EffectorDocument8 pagesDesign of A Drone With A Robotic End-EffectorRisira Erantha KannangaraNo ratings yet
- SABA WorksheetDocument11 pagesSABA Worksheetjetlysaba2003No ratings yet
- Unmanned Aerial Vehicles: AbstractDocument4 pagesUnmanned Aerial Vehicles: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- BICOPTERDocument22 pagesBICOPTERManideep Ananthula100% (4)
- An Approach To Surveillance An Area Using Swarm of Fixed Wing and Quad-Rotor Unmanned Aerial Vehicles UAV(s)Document6 pagesAn Approach To Surveillance An Area Using Swarm of Fixed Wing and Quad-Rotor Unmanned Aerial Vehicles UAV(s)Syed MamnoonNo ratings yet
- Amphibious Robot II PDFDocument6 pagesAmphibious Robot II PDFAman TripathiNo ratings yet
- IJSRET V7 Issue2 221Document19 pagesIJSRET V7 Issue2 221Vissu PraveenNo ratings yet
- 01 A New Perspective To Altitude Acquire and Hold For Fixed Wing UavsDocument5 pages01 A New Perspective To Altitude Acquire and Hold For Fixed Wing Uavspajapat246No ratings yet
- Design and Model Construction of Flapping Wing Uav Ornithopter and It'S ControllingDocument12 pagesDesign and Model Construction of Flapping Wing Uav Ornithopter and It'S ControllingNATARAJ REDDYNo ratings yet
- Abstract:: Camouflage Technique Based Multifunctional Army RobotDocument53 pagesAbstract:: Camouflage Technique Based Multifunctional Army RobotBv KarthikNo ratings yet
- Drones QB AnsDocument8 pagesDrones QB AnsTaran ShahNo ratings yet
- Drone UavDocument20 pagesDrone UavPooja BanNo ratings yet
- A Hovering Control Strategy For A Tail-Sitter VTOL UAV That Increases Stability Against Large DisturbanceDocument6 pagesA Hovering Control Strategy For A Tail-Sitter VTOL UAV That Increases Stability Against Large DisturbanceHarshil NaikNo ratings yet
- Modeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureDocument16 pagesModeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureRicardo Sebastian Ricardo RanillaNo ratings yet
- Design of A Flight Control System Based On HILS Test PlatformDocument5 pagesDesign of A Flight Control System Based On HILS Test PlatformJose SantosNo ratings yet
- Unmanned Air Vehicles: Universidad Iberoamericana Ciudad de México, MéxicoDocument6 pagesUnmanned Air Vehicles: Universidad Iberoamericana Ciudad de México, MéxicoJosé Ignacio Hernández MonroyNo ratings yet
- Saripalli 2002Document6 pagesSaripalli 2002Shubham SinghalNo ratings yet
- Design, Fabrication, and Performance Test of A Hovering-Based Flapping-Wing Micro Air Vehicle Capable of Sustained and Controlled FlightDocument8 pagesDesign, Fabrication, and Performance Test of A Hovering-Based Flapping-Wing Micro Air Vehicle Capable of Sustained and Controlled FlightOlasco OmoolaNo ratings yet
- Robotic SystemDocument24 pagesRobotic SystemadimrinNo ratings yet
- Seminar ReportDocument24 pagesSeminar ReportAnup BorseNo ratings yet
- Cable Telescopic ActuationDocument7 pagesCable Telescopic ActuationSuryank JoshiNo ratings yet
- Design and Analysis of Wing For Next Generation Uavs IJERTV3IS110311Document3 pagesDesign and Analysis of Wing For Next Generation Uavs IJERTV3IS110311Sunidhi GuptaNo ratings yet
- Chapter-1 Introduction of Micro Air VehiclesDocument28 pagesChapter-1 Introduction of Micro Air VehiclesRockey RoockNo ratings yet
- Papier Sys CONDocument7 pagesPapier Sys CONNguyễn Trọng SơnNo ratings yet
- Irjet-V9i7299 240430 222302Document6 pagesIrjet-V9i7299 240430 222302Vignesh VishnuuNo ratings yet
- Surveillance Drones and Their ApplicationsDocument4 pagesSurveillance Drones and Their ApplicationsAryan RautNo ratings yet
- Aerial Robotics For Team 1Document8 pagesAerial Robotics For Team 1brenda yadira lopez solanoNo ratings yet
- Design and Analysis of An Unmaaned Aerial VehicleDocument8 pagesDesign and Analysis of An Unmaaned Aerial VehicleDeb PradhanNo ratings yet
- DroneDocument13 pagesDronebhavani velineniNo ratings yet
- A Short Review of The Drone Technology: August 2022Document17 pagesA Short Review of The Drone Technology: August 2022sarthak ghimireNo ratings yet
- Experimental Modal Analysis of A Small UDocument7 pagesExperimental Modal Analysis of A Small U紀俞揚No ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- A Short Review of The Drone Technology: August 2022Document17 pagesA Short Review of The Drone Technology: August 2022rokomNo ratings yet
- Unit 2Document21 pagesUnit 2vigneshNo ratings yet
- Festo BionicFlyingFox enDocument8 pagesFesto BionicFlyingFox enLorena OrduñaNo ratings yet
- FYP Research Paper SSUET FINALDocument5 pagesFYP Research Paper SSUET FINALNabeel ShahzadNo ratings yet
- Lo Quadrotor With MPC Model ImplementationDocument28 pagesLo Quadrotor With MPC Model ImplementationSai NavaneetNo ratings yet
- MidTerm AutonomousQuad TextDocument7 pagesMidTerm AutonomousQuad TextHoang PhamNo ratings yet
- Autonomous Control and Simulation of The Videoray Pro Iii Vehicle Using Moos and Ivp HelmDocument10 pagesAutonomous Control and Simulation of The Videoray Pro Iii Vehicle Using Moos and Ivp HelmanitapinkyNo ratings yet
- Modeling and Controlling of Quadrotor Aerial Vehicle Equipped With A GripperDocument11 pagesModeling and Controlling of Quadrotor Aerial Vehicle Equipped With A GripperАртем РябиновNo ratings yet
- Self TunedPIDControllerfortheAerosondeUAVAutopilotDocument12 pagesSelf TunedPIDControllerfortheAerosondeUAVAutopilotpajapat246No ratings yet
- 2009 Guidance - and - Nonlinear - Control - System - FoDocument24 pages2009 Guidance - and - Nonlinear - Control - System - FoabredulebreNo ratings yet
- Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesFrom EverandAutonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesNo ratings yet
- How to buy and fly a quadcopter drone: a small guide and flight schoolFrom EverandHow to buy and fly a quadcopter drone: a small guide and flight schoolNo ratings yet
- Aerial Perspectives - Mastering Drone PhotographyFrom EverandAerial Perspectives - Mastering Drone PhotographyNo ratings yet
- Product Form: Api 6A LT ASTM A694 F60Document5 pagesProduct Form: Api 6A LT ASTM A694 F60Ejaz KNo ratings yet
- Supriya Vinod Bhirud ResumeDocument5 pagesSupriya Vinod Bhirud ResumeEjaz KNo ratings yet
- College of Engineering & Technology: Udyambag, Belgaum - 590 008Document11 pagesCollege of Engineering & Technology: Udyambag, Belgaum - 590 008Ejaz KNo ratings yet
- Resume Varsha 2022Document4 pagesResume Varsha 2022Ejaz KNo ratings yet
- CV Yogesh May19Document4 pagesCV Yogesh May19Ejaz KNo ratings yet
- 093 - Keynote 2009 PERONIDocument83 pages093 - Keynote 2009 PERONIEjaz KNo ratings yet
- Fibers Analysis: Kelly, Jeff, Hieu Dr. Hornbuckle Clayton State UniversityDocument28 pagesFibers Analysis: Kelly, Jeff, Hieu Dr. Hornbuckle Clayton State UniversityEjaz KNo ratings yet
- Zero Energy Building by Solar Trigeneration'Document17 pagesZero Energy Building by Solar Trigeneration'Ejaz KNo ratings yet
- Bose Suspension SystemDocument12 pagesBose Suspension SystemEjaz KNo ratings yet
- Robots in Radioactive Environments Seminar 2004Document23 pagesRobots in Radioactive Environments Seminar 2004Ejaz KNo ratings yet
- Application of CFD To Find The Dispersion of Contaminants inDocument13 pagesApplication of CFD To Find The Dispersion of Contaminants inEjaz KNo ratings yet
- Automotive Alternative FuelsDocument10 pagesAutomotive Alternative FuelsEjaz KNo ratings yet
- FUEL CELLS - BVBDocument13 pagesFUEL CELLS - BVBEjaz KNo ratings yet
- Thermoelectric Refrigeraton1Document10 pagesThermoelectric Refrigeraton1Ejaz KNo ratings yet
- Non Conventional Energy Sources Solar Tower TechnologyDocument10 pagesNon Conventional Energy Sources Solar Tower TechnologyEjaz KNo ratings yet
- "Zero Energy Building by Solar Trigeneration": S. G. Balekundri Institute of TechnologyDocument2 pages"Zero Energy Building by Solar Trigeneration": S. G. Balekundri Institute of TechnologyEjaz KNo ratings yet
- Thermoacoustic RefrigeratorDocument12 pagesThermoacoustic RefrigeratorEjaz KNo ratings yet
- Stair Climbing Robot (Msrox)Document11 pagesStair Climbing Robot (Msrox)Ejaz KNo ratings yet
- Non-Conventional Energy Source Harnessing Energy From Busy City TrafficDocument5 pagesNon-Conventional Energy Source Harnessing Energy From Busy City TrafficEjaz KNo ratings yet
- Trigeneration PrintDocument17 pagesTrigeneration PrintEjaz KNo ratings yet
- Sri Taralabalu Jagadguru Institute of Technology: Ranebennur-581115Document12 pagesSri Taralabalu Jagadguru Institute of Technology: Ranebennur-581115Ejaz KNo ratings yet
- Wankel Engine/ Rotary Engine OR Pistonless Rotary EngineDocument13 pagesWankel Engine/ Rotary Engine OR Pistonless Rotary EngineEjaz KNo ratings yet
- RexoilDocument1 pageRexoilEslam MansourNo ratings yet
- Sor 2019 20Document158 pagesSor 2019 20Nagarajan DNo ratings yet
- Ak09940 en ProductbriefDocument3 pagesAk09940 en Productbriefjigofis102No ratings yet
- BS 8010-2.5 (1989) Pipelines On Land - Glass Reinforced Thermosetting PlasticsDocument30 pagesBS 8010-2.5 (1989) Pipelines On Land - Glass Reinforced Thermosetting PlasticsGregory Simmon100% (2)
- X2ED94JWNJUGOK0C13ALQG6BWSQNESDocument44 pagesX2ED94JWNJUGOK0C13ALQG6BWSQNESPrashantsutharNo ratings yet
- Tips GAMEBOYDocument7 pagesTips GAMEBOYRaphael JolonNo ratings yet
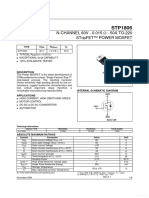
- STP 1806Document9 pagesSTP 1806David OweiNo ratings yet
- Inverted Sentences For Advanced Learners of EnglishDocument2 pagesInverted Sentences For Advanced Learners of EnglishmisanthropoNo ratings yet
- Free Live Sex Cams and Adult Chat With Naked GirlDocument5 pagesFree Live Sex Cams and Adult Chat With Naked GirlMarc Roca BOscNo ratings yet
- A EmeliaDocument28 pagesA EmeliaThiện NhânNo ratings yet
- Filipe Miguel Faria Da SilvaDocument263 pagesFilipe Miguel Faria Da SilvaroyclhorNo ratings yet
- Ijigsp V7 N6 6 PDFDocument7 pagesIjigsp V7 N6 6 PDFShantala GiraddiNo ratings yet
- GSM Path Planning For Blind Person Using UltrasonicDocument4 pagesGSM Path Planning For Blind Person Using UltrasonicManasa Chikkala0% (1)
- 3900 Series Base Station Technical Description (11) (PDF) - enDocument636 pages3900 Series Base Station Technical Description (11) (PDF) - enmzab82100% (5)
- Telephone NetworkDocument8 pagesTelephone NetworkMeejanur RahamanNo ratings yet
- False Ceiling PDFDocument2 pagesFalse Ceiling PDFSteve50% (2)
- Arrangement of Different Sections of Dairy PlantDocument5 pagesArrangement of Different Sections of Dairy PlantyemNo ratings yet
- The Kiddie Korral Kastle: A Chance To Win A Full Year'S TuitionDocument44 pagesThe Kiddie Korral Kastle: A Chance To Win A Full Year'S TuitionCoolerAdsNo ratings yet
- Llustrated Arts Anual: Transmatic Lawn Tractor - Model Series 700Document32 pagesLlustrated Arts Anual: Transmatic Lawn Tractor - Model Series 700Marco MalaveNo ratings yet
- Curriculum Vitae PDFDocument1 pageCurriculum Vitae PDFhafid anggitoNo ratings yet
- Tutorial 8Document2 pagesTutorial 8Kazi Yasin IslamNo ratings yet
- Introduction of Analysis Design & AlgorithmDocument42 pagesIntroduction of Analysis Design & Algorithmsb_sriitNo ratings yet
- Elevator PM ChecklistDocument12 pagesElevator PM ChecklistAndrew jacangNo ratings yet
- Ltu Ex 08210 SeDocument98 pagesLtu Ex 08210 SeflaunayNo ratings yet
- UltraPlanetory System InstructionsDocument14 pagesUltraPlanetory System InstructionsPeter HanNo ratings yet
- 2.2 & 2.3 CH 7 Creating Value Targeting & PositioningDocument4 pages2.2 & 2.3 CH 7 Creating Value Targeting & PositioningNgơTiênSinhNo ratings yet
- System M Insevice Overview 11.8.11Document26 pagesSystem M Insevice Overview 11.8.11Travis DayNo ratings yet