
Effects of Adaptive Social Networks On The Robustness of Evolutionary Algorithms
Effects of Adaptive Social Networks On The Robustness of Evolutionary Algorithms
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Principles of Econometrics 4th Edition Hill Solutions ManualDocument34 pagesPrinciples of Econometrics 4th Edition Hill Solutions Manualcourtneyriceacnmbxqiky100% (13)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Van Bemmelen 1949 - Geology of Indonesia Vol IB Portfolio PDFDocument61 pagesVan Bemmelen 1949 - Geology of Indonesia Vol IB Portfolio PDFSabar0% (1)
- Direct Combustion SystemsDocument284 pagesDirect Combustion SystemsluchoosorioNo ratings yet
- Gyorgy Cziffra - MemoirsDocument113 pagesGyorgy Cziffra - MemoirsLuis Miguel Gallego OntilleraNo ratings yet
- An Examination of Children S Senses The Damaging Effects of Media and The Therapeutic Possibilities of Puppetry PDFDocument121 pagesAn Examination of Children S Senses The Damaging Effects of Media and The Therapeutic Possibilities of Puppetry PDFsiniordottoreNo ratings yet
- Self-Knowledge Swami AbhedanandaDocument192 pagesSelf-Knowledge Swami Abhedanandajaikshat100% (1)
- Perfect Polymers - Product-Introduction - SUNPAL Multiwall Cell) Polycarbonate Standing-Seam Architectural SystemDocument28 pagesPerfect Polymers - Product-Introduction - SUNPAL Multiwall Cell) Polycarbonate Standing-Seam Architectural SystemGirish DhawanNo ratings yet
- WM 2 Inch Drain LineDocument2 pagesWM 2 Inch Drain LineMark Darrel AranasNo ratings yet
- AirValves 2013 PDFDocument268 pagesAirValves 2013 PDFSergio Sebastian Ramirez GamiñoNo ratings yet
- ABCDocument37 pagesABCManha KhurramNo ratings yet
- Moeller df51 Manual PDFDocument241 pagesMoeller df51 Manual PDFpraetorianbl0% (2)
- Airbags Chevro S10 1997Document95 pagesAirbags Chevro S10 1997roberto galvanNo ratings yet
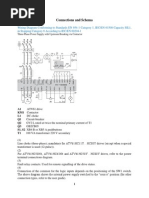
- Connections and SchemaDocument7 pagesConnections and SchemaKukuh WidodoNo ratings yet
- Lacey Lord, "Comics: The (Not Only) Visual Medium"Document131 pagesLacey Lord, "Comics: The (Not Only) Visual Medium"MIT Comparative Media Studies/WritingNo ratings yet
- IPF Technical Rules Book 2022 1Document38 pagesIPF Technical Rules Book 2022 1Fabbio HuNo ratings yet
- By: Eng Mai HassanDocument17 pagesBy: Eng Mai HassanAhmed ElhuseinyNo ratings yet
- Continental DriftDocument6 pagesContinental DriftEder Aguirre CapangpanganNo ratings yet
- 465 - 465 - Lab No 3 1Document3 pages465 - 465 - Lab No 3 1teenwolf14lidiaNo ratings yet
- Chapter-1: 1.1 Compression Ignition Engine EmissionsDocument17 pagesChapter-1: 1.1 Compression Ignition Engine EmissionsRavi AnuNo ratings yet
- Week 1 - Assessment #1Document2 pagesWeek 1 - Assessment #1elaineNo ratings yet
- IC10 2011 3SB3 22mmDocument116 pagesIC10 2011 3SB3 22mmbajricaNo ratings yet
- Metals and Non Metals 1Document34 pagesMetals and Non Metals 1Alessandra myrnaNo ratings yet
- Brother Gino: Apostle of Our Lady of FatimaDocument2 pagesBrother Gino: Apostle of Our Lady of FatimaThe Fatima CenterNo ratings yet
- TestDocument19 pagesTestSkipper SkyNo ratings yet
- Have Yourself A Merry Little Christmas - Frank SinatraDocument2 pagesHave Yourself A Merry Little Christmas - Frank Sinatranicograuby100% (1)
- Technical AnalysisDocument4 pagesTechnical AnalysisShikha ShuklaNo ratings yet
- The Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Document8 pagesThe Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Nadia SantiniNo ratings yet
- Correlation and RegressionDocument39 pagesCorrelation and RegressionMuhammad Amjad RazaNo ratings yet
- Studio One 5 - Release NotesDocument23 pagesStudio One 5 - Release NotesPablo De la QuintanaNo ratings yet
- III Module - A Survey On 4G-5G Dual Connectivity - Road To 5G ImplementationDocument18 pagesIII Module - A Survey On 4G-5G Dual Connectivity - Road To 5G ImplementationJoathan LessaNo ratings yet





































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Principles of Econometrics 4th Edition Hill Solutions ManualDocument34 pagesPrinciples of Econometrics 4th Edition Hill Solutions Manualcourtneyriceacnmbxqiky100% (13)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Van Bemmelen 1949 - Geology of Indonesia Vol IB Portfolio PDFDocument61 pagesVan Bemmelen 1949 - Geology of Indonesia Vol IB Portfolio PDFSabar0% (1)
- Direct Combustion SystemsDocument284 pagesDirect Combustion SystemsluchoosorioNo ratings yet
- Gyorgy Cziffra - MemoirsDocument113 pagesGyorgy Cziffra - MemoirsLuis Miguel Gallego OntilleraNo ratings yet
- An Examination of Children S Senses The Damaging Effects of Media and The Therapeutic Possibilities of Puppetry PDFDocument121 pagesAn Examination of Children S Senses The Damaging Effects of Media and The Therapeutic Possibilities of Puppetry PDFsiniordottoreNo ratings yet
- Self-Knowledge Swami AbhedanandaDocument192 pagesSelf-Knowledge Swami Abhedanandajaikshat100% (1)
- Perfect Polymers - Product-Introduction - SUNPAL Multiwall Cell) Polycarbonate Standing-Seam Architectural SystemDocument28 pagesPerfect Polymers - Product-Introduction - SUNPAL Multiwall Cell) Polycarbonate Standing-Seam Architectural SystemGirish DhawanNo ratings yet
- WM 2 Inch Drain LineDocument2 pagesWM 2 Inch Drain LineMark Darrel AranasNo ratings yet
- AirValves 2013 PDFDocument268 pagesAirValves 2013 PDFSergio Sebastian Ramirez GamiñoNo ratings yet
- ABCDocument37 pagesABCManha KhurramNo ratings yet
- Moeller df51 Manual PDFDocument241 pagesMoeller df51 Manual PDFpraetorianbl0% (2)
- Airbags Chevro S10 1997Document95 pagesAirbags Chevro S10 1997roberto galvanNo ratings yet
- Connections and SchemaDocument7 pagesConnections and SchemaKukuh WidodoNo ratings yet
- Lacey Lord, "Comics: The (Not Only) Visual Medium"Document131 pagesLacey Lord, "Comics: The (Not Only) Visual Medium"MIT Comparative Media Studies/WritingNo ratings yet
- IPF Technical Rules Book 2022 1Document38 pagesIPF Technical Rules Book 2022 1Fabbio HuNo ratings yet
- By: Eng Mai HassanDocument17 pagesBy: Eng Mai HassanAhmed ElhuseinyNo ratings yet
- Continental DriftDocument6 pagesContinental DriftEder Aguirre CapangpanganNo ratings yet
- 465 - 465 - Lab No 3 1Document3 pages465 - 465 - Lab No 3 1teenwolf14lidiaNo ratings yet
- Chapter-1: 1.1 Compression Ignition Engine EmissionsDocument17 pagesChapter-1: 1.1 Compression Ignition Engine EmissionsRavi AnuNo ratings yet
- Week 1 - Assessment #1Document2 pagesWeek 1 - Assessment #1elaineNo ratings yet
- IC10 2011 3SB3 22mmDocument116 pagesIC10 2011 3SB3 22mmbajricaNo ratings yet
- Metals and Non Metals 1Document34 pagesMetals and Non Metals 1Alessandra myrnaNo ratings yet
- Brother Gino: Apostle of Our Lady of FatimaDocument2 pagesBrother Gino: Apostle of Our Lady of FatimaThe Fatima CenterNo ratings yet
- TestDocument19 pagesTestSkipper SkyNo ratings yet
- Have Yourself A Merry Little Christmas - Frank SinatraDocument2 pagesHave Yourself A Merry Little Christmas - Frank Sinatranicograuby100% (1)
- Technical AnalysisDocument4 pagesTechnical AnalysisShikha ShuklaNo ratings yet
- The Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Document8 pagesThe Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Nadia SantiniNo ratings yet
- Correlation and RegressionDocument39 pagesCorrelation and RegressionMuhammad Amjad RazaNo ratings yet
- Studio One 5 - Release NotesDocument23 pagesStudio One 5 - Release NotesPablo De la QuintanaNo ratings yet
- III Module - A Survey On 4G-5G Dual Connectivity - Road To 5G ImplementationDocument18 pagesIII Module - A Survey On 4G-5G Dual Connectivity - Road To 5G ImplementationJoathan LessaNo ratings yet